微空无人机视觉导航教程1-飞行平台搭建
微空科技无人机视觉导航教程系列包含:
-
飞行平台搭建
-
双目VIO算法实现与应用(树莓派5+D435i)
-
拓展应用案例
《飞行平台搭建篇》以 微空科技的 MVD35 飞行平台为例,介绍无人机视觉平台硬件搭建过程(MVD35 分为 T265 版 和 D435i 版,本篇统一介绍两种版本飞行平台搭建过程)

MVD35 套件购买



准备内容
1. 硬件准备(微空MVD35飞行平台)
-
T265 及 USB A - Micro USB 3.0 弯头数据线 (MVD35 T265版)
-
D435i 及 USB A - C 3.0 弯头数据线 (MVD35 D435i版)
-
树莓派 4B (T265版)/ 树莓派5 (D435i版)(4GB RAM 版本)及 USB A - C 弯头数据线、HDMI - Micro HDMI 数据线
-
32G TF 存储卡及读卡器
-
微空 MicoAir743 飞塔套装(包含:MicoAir743飞控、蓝鸟 48K 50A 四合一电调、4G TF 存储卡、配套连接线、电源线、减震柱、电容及插头等)
-
微空 MVD35 飞行平台机架(包含:机架主碳纤板、3.5' 防护圈、脚架、T265 / D435i 固定板、电机垫片、减震柱、电池绑带、配套的螺丝螺母及铝柱等)
-
微空 MT-01P 激光测距传感器(可升级 MTF-01P 光流测距一体传感器,提供更多扩展性,本篇中使用 MTF-01P)
-
微空 TRS 2.4G遥数一体接收机 (需搭配微空TRS高频头一起使用)
-
微空 5V5A 机载电脑供电板及 USB C - C 弯头电源线
-
6S1P 1500mah 高压版锂电池
-
2004 2100KV 电机 ✖ 4
-
HQprop 3.5' 正反桨 ✖ 4
2. 工具准备
-
焊接平台(包含:电烙铁、焊锡丝、助焊剂等)
-
常用螺丝刀工具、剪线钳、尖嘴钳、胶布等
飞行平台搭建
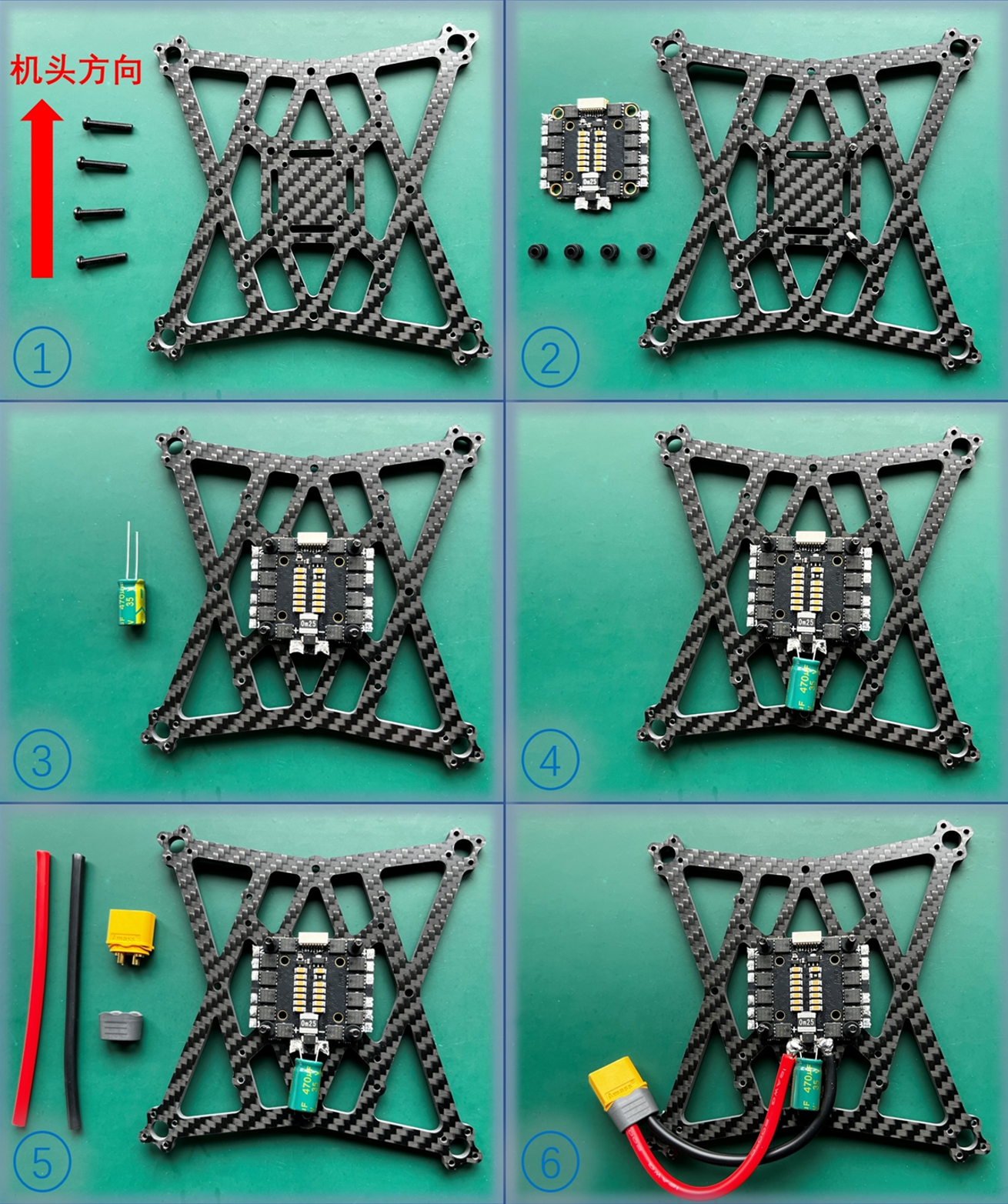
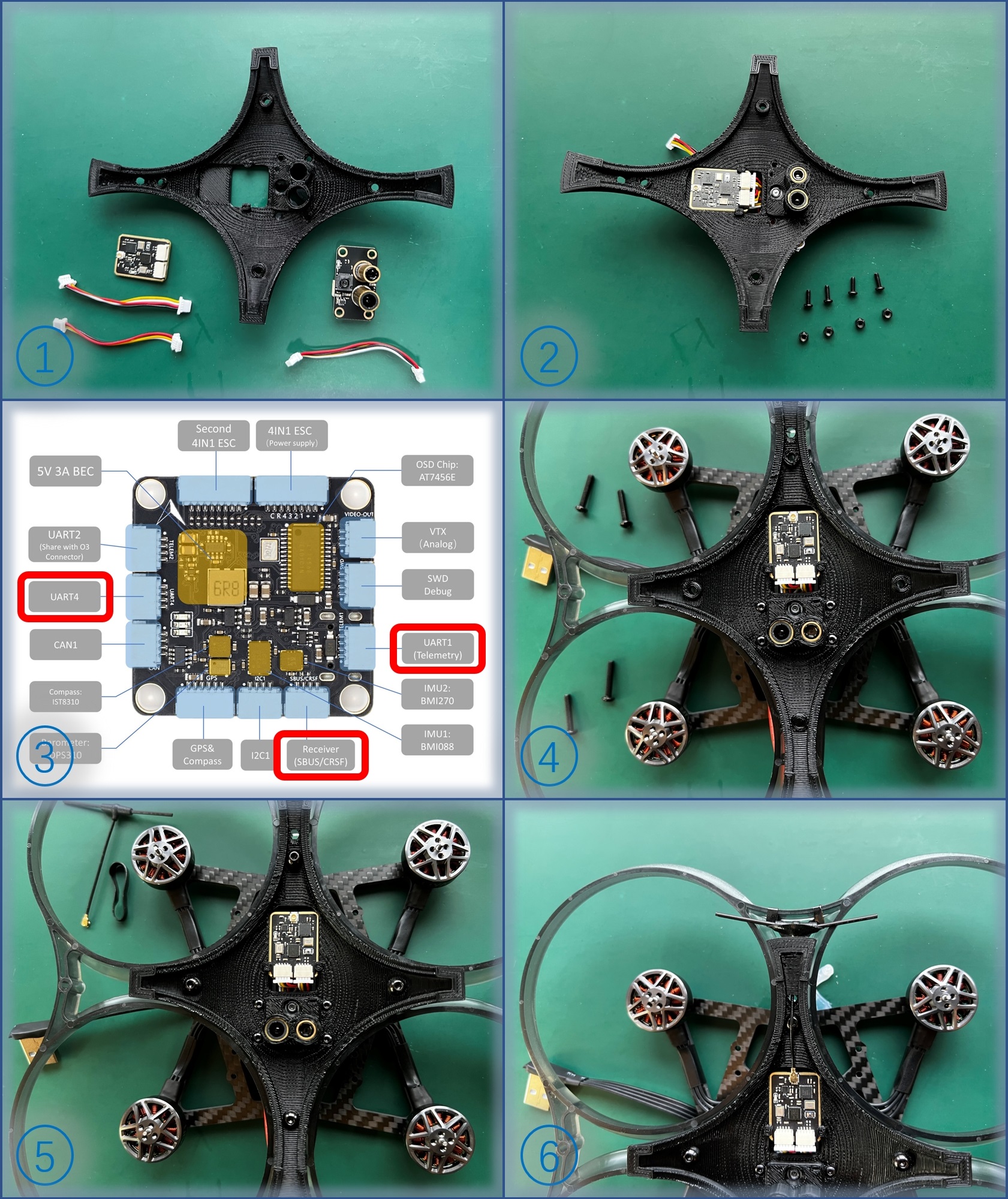
1. 安装电调
-
使用 4 颗 M3✖18mm 圆头螺丝穿过碳纤板中心 30.5✖30.5mm 孔位,螺丝头沉入孔位中
-
将 4 个 M3✖4.5mm 减震柱安装到电调并将电调装入螺丝位置,电调接线座子朝向无人机机头方向,电调背面贴近碳纤板
-
将电源电容管脚剪掉适当长度,焊接到电调电源焊盘上,注意正负极对应
-
电源线一端焊接到电调电源焊盘上,另一端焊接到 XT60 接口
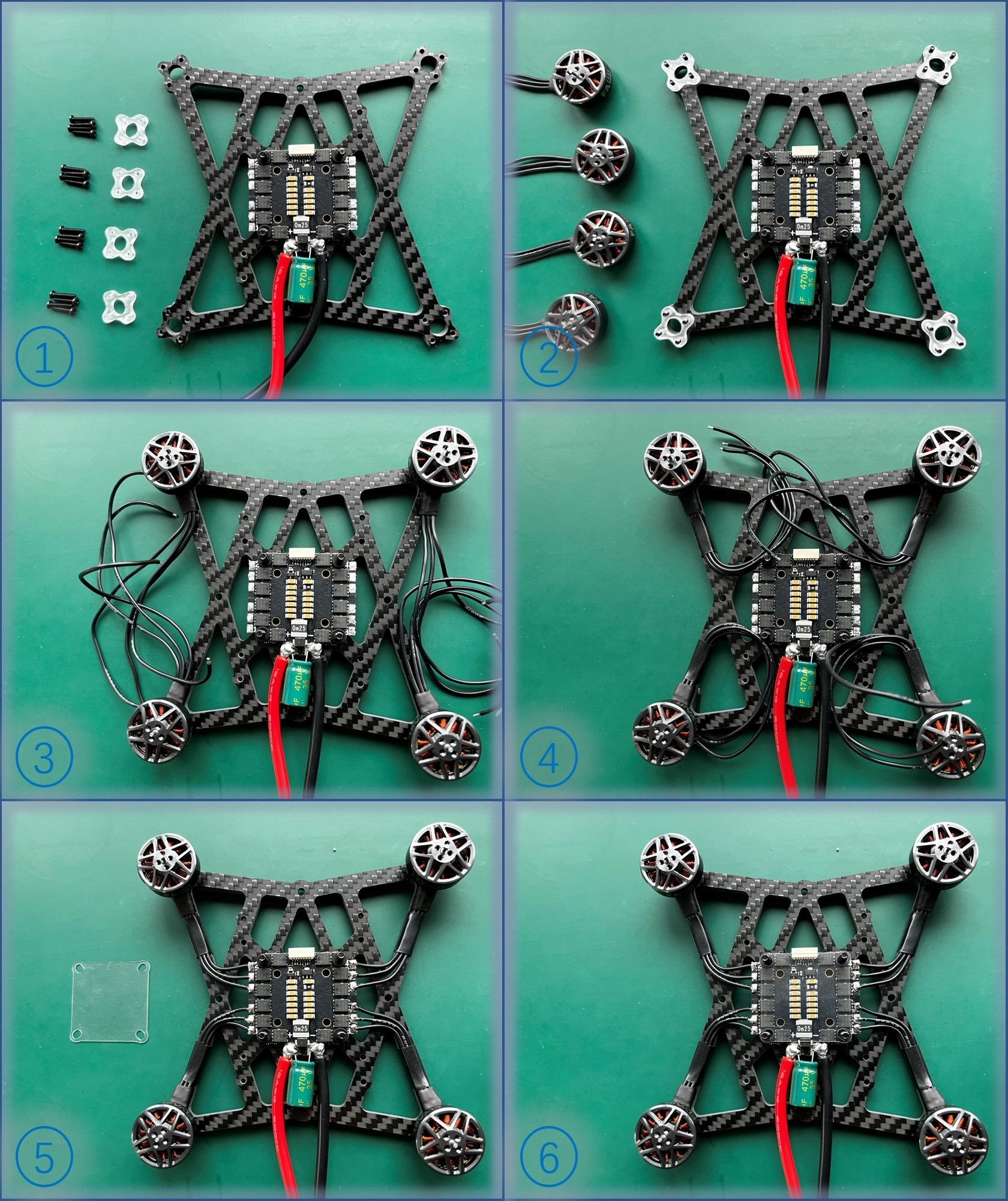
2. 安装电机
-
使用 16 颗 M2✖10mm 圆头螺丝穿过碳纤板电机孔位,并将 4 个电机垫片分别固定到螺丝上
-
将 4 个电机固定到电机垫片螺丝上,电机线束沿着机臂方向,使用绝缘胶布缠紧
-
将电机线束裁剪到适当长度,焊接到电调焊盘上
-
将绝缘片安装到电调的螺丝上
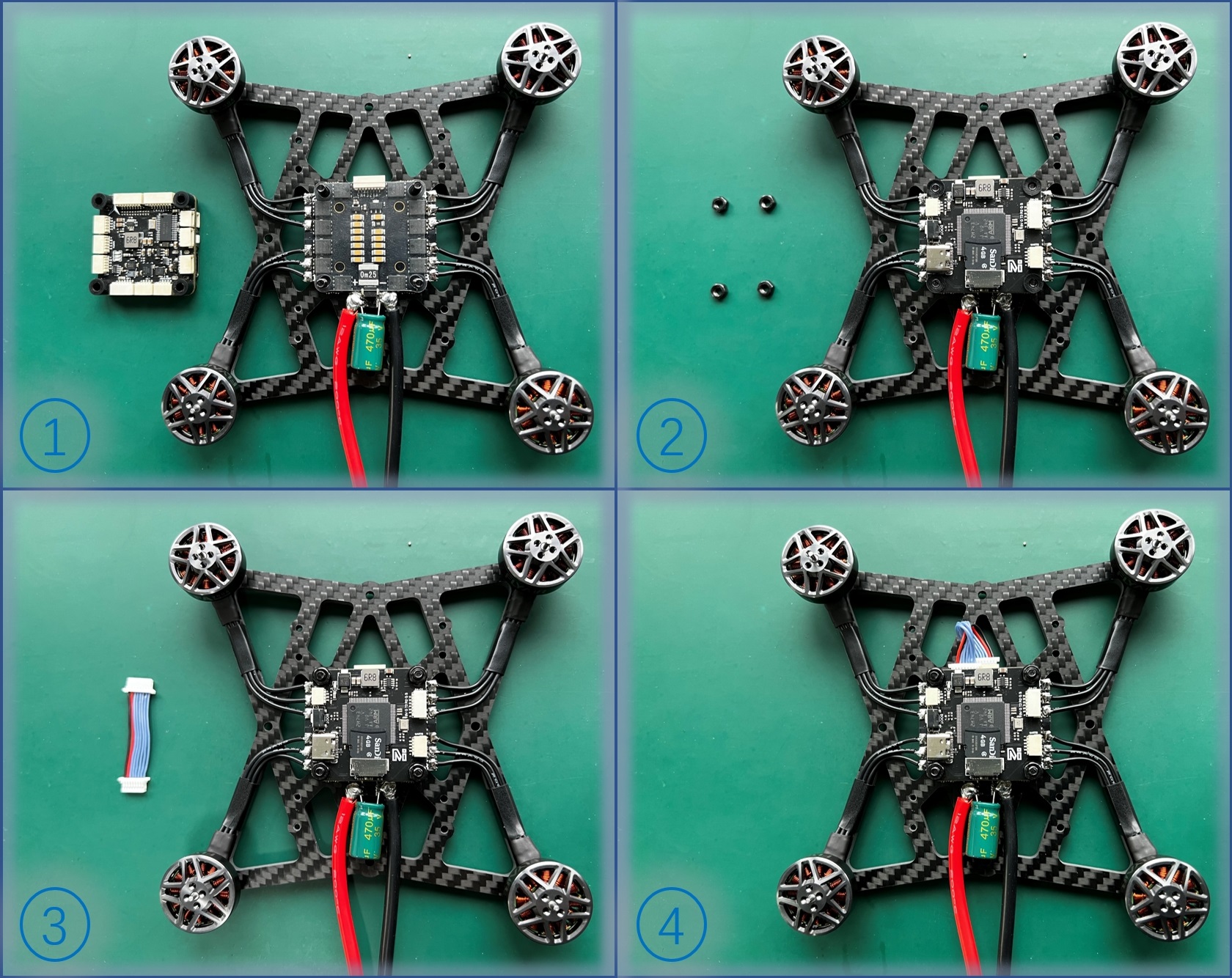
3. 安装飞控
-
将 4 个 M3✖8mm 减震柱安装到 MicoAir743 飞控板上,飞控固定到电调螺丝上,飞控箭头指向机头方向,飞控正面靠近碳纤板
-
将 4 颗 M3 螺母安装到飞控螺丝上,固定住飞控与电调
-
将飞控与电调使用配套 SH1.0-8Pin 硅胶线连接
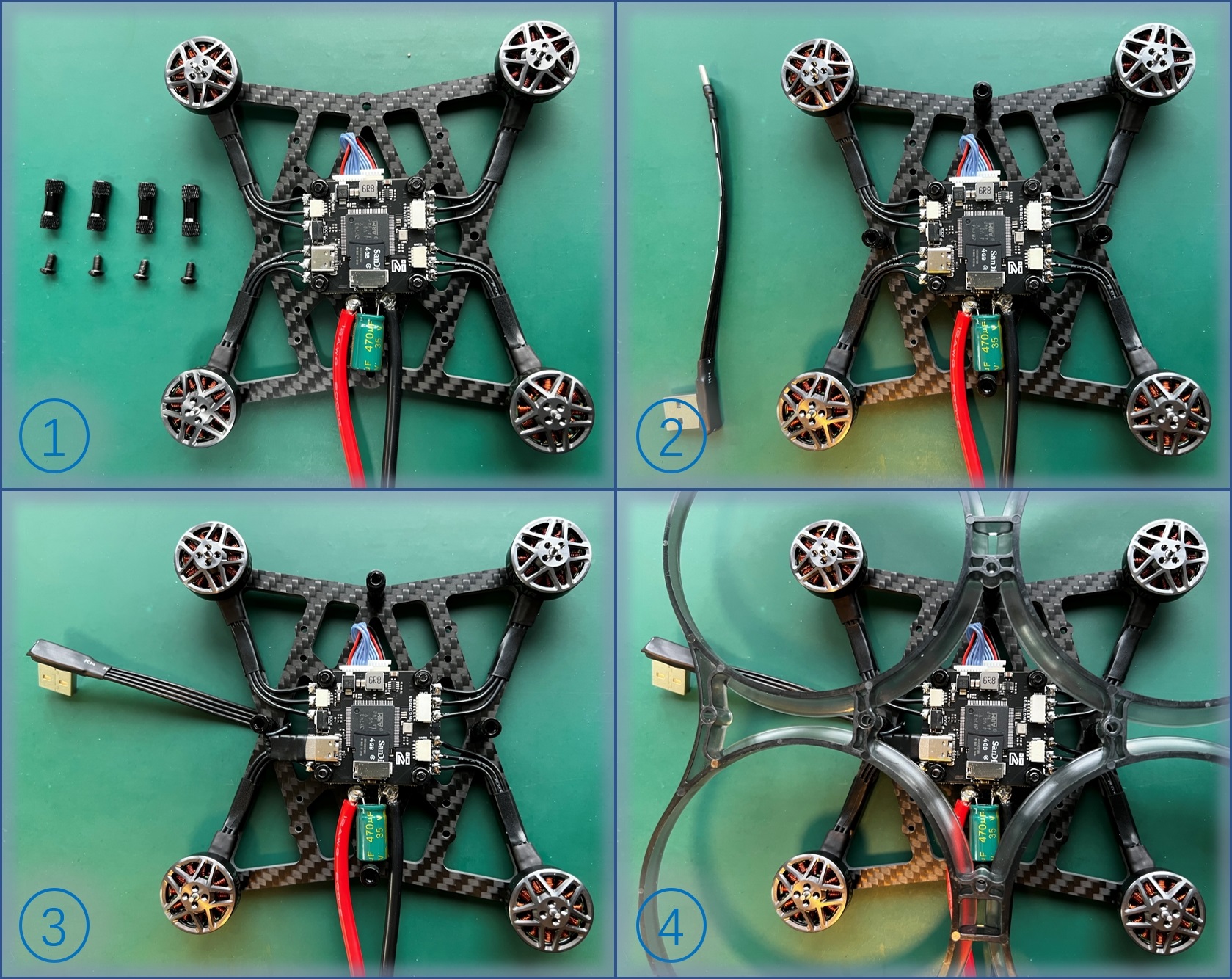
4. 安装防护圈
-
将 4 个 M3✖18mm D6 工形铝柱使用 M3✖6mm 圆头螺丝安装到碳纤板四周孔位上,螺丝头沉入孔位中
-
将 USB A - C 连接线穿过碳纤板空位,插入飞控 Type C 口
-
机架防护圈嵌入铝柱中,防护圈唇口方向一侧靠近碳纤板
5. 安装脚架
-
将 TRS 接收机卡入接收机固定位
-
将 MTF-01P 激光测距模块安装到脚架上,使用 4 颗 M2✖6mm 圆头螺丝和 M2 防松螺母固定
-
使用配套 SH1.0-4Pin 硅胶线连接 MTF-01P 激光测距模块、TRS 接收机与飞控( MTF-01P 连接到 UART4;TRS 数传连接到 UART1;TRS SBUS 信号连接到 UART6 飞控 RC 端口)
-
使用 4 颗 M3✖16mm 圆头螺丝将脚架固定到机架上
-
将配套的 T 形天线穿过脚架天线孔,接入到 TRS 接收机 IPEX 接口上,天线另一端固定到防护圈上
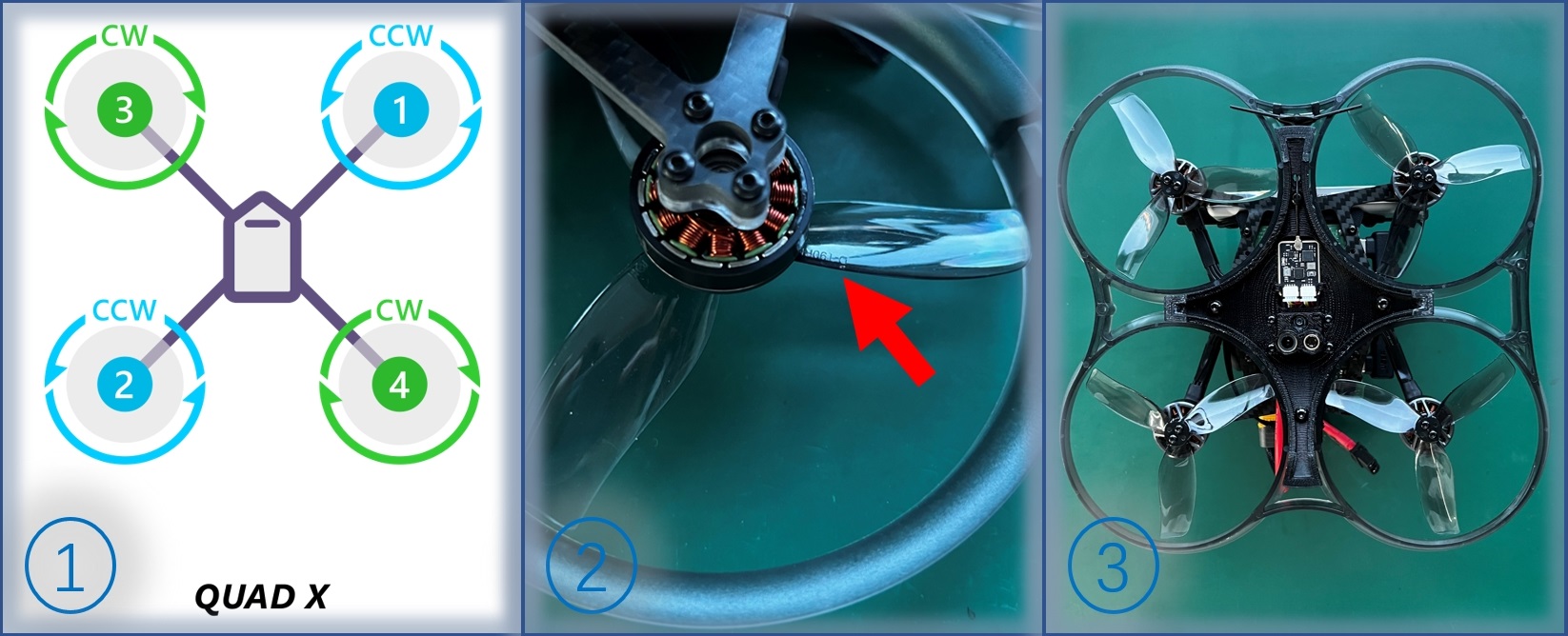
6. 安装螺旋桨
-
螺旋桨有正反桨的区别,需要安装在正确位置上。将安装好的机架水平放置,机头朝前,脚架朝下,以俯视视角:左上和右下电机为顺时针转向;右上和左下电机为逆时针转向
-
按照电机转向确定各个位置上对应的螺旋桨
-
将 HQprop 3.5' 正反桨中心孔插入对应电机轴上,确认电机转动时向下吹风,桨叶上印字母部分为上方
-
将螺旋桨固定孔对准电机孔位,使用 8 颗 M2✖8mm 圆头螺丝固定螺旋桨
-
关于电机转向测试及修改电机转向,《飞控基础设置篇(Ardupilot及PX4)》将会具体介绍,本篇中直接按照正确方向安装好螺旋桨即可
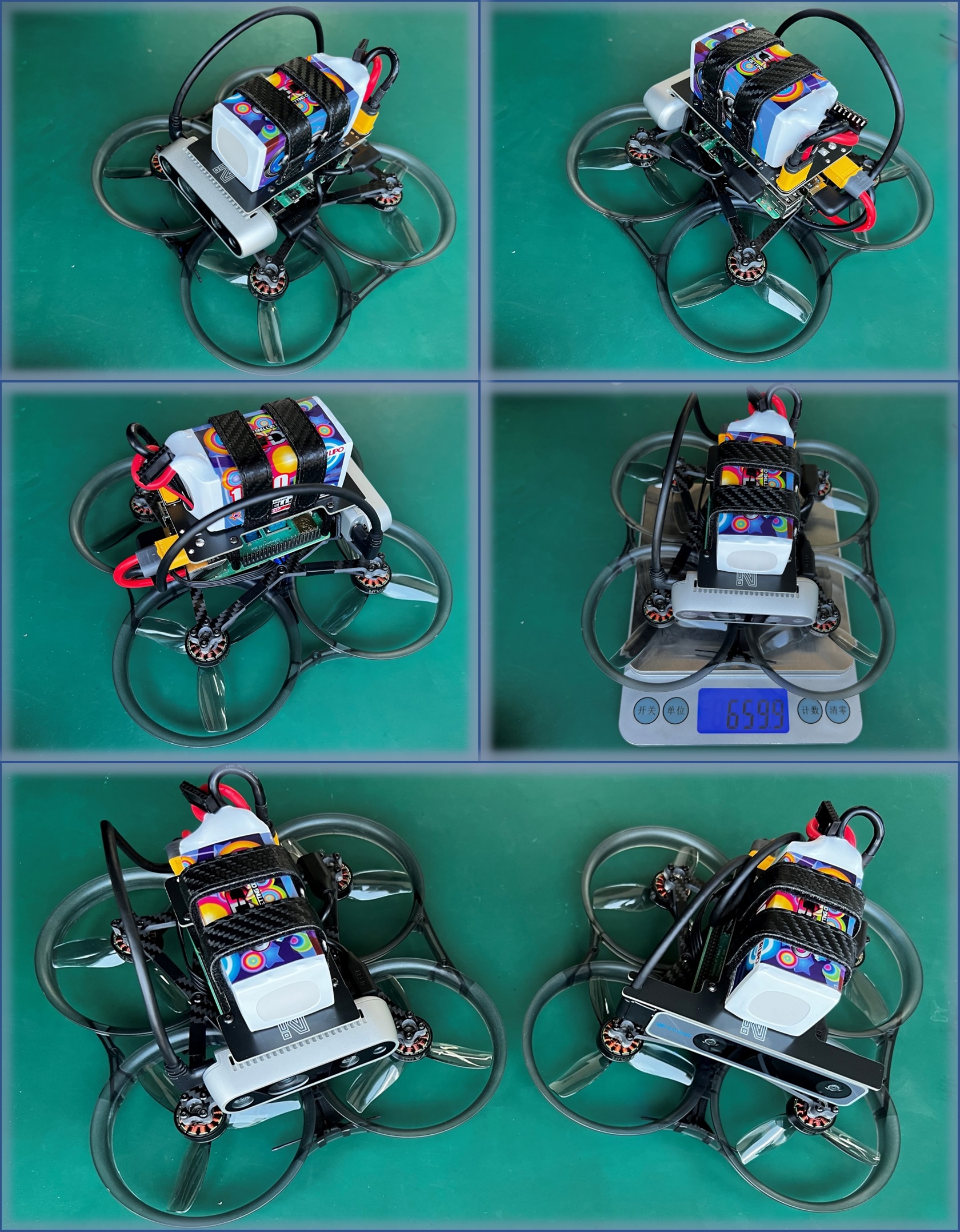
7. 安装视觉传感器(根据不同版本选装 T265 或 D435i )
MVD35-T265 版
-
将 4 个 M3✖4.5mm 减震柱安装到 T265 固定板上
-
使用 2 颗 M3✖6mm 圆头螺丝将 T265 安装到固定板上,固定板靠近 Micro USB 口一侧
-
使用 2 颗 M2.5✖12mm 圆头螺丝将 T265 整体固定到碳纤板机头孔位,T265 镜头朝前,Micro USB 口朝右

MVD35-D435i 版
-
将 2 个 M3✖4.5mm 减震柱安装到 D435i 固定板上
-
使用 2 颗 M3✖6mm 圆头螺丝将 D435i 安装到固定板上
-
使用 2 颗 M2.5✖12mm 圆头螺丝将 D435i 整体固定到碳纤板机头孔位,D435i 镜头朝前,Type C 口朝右

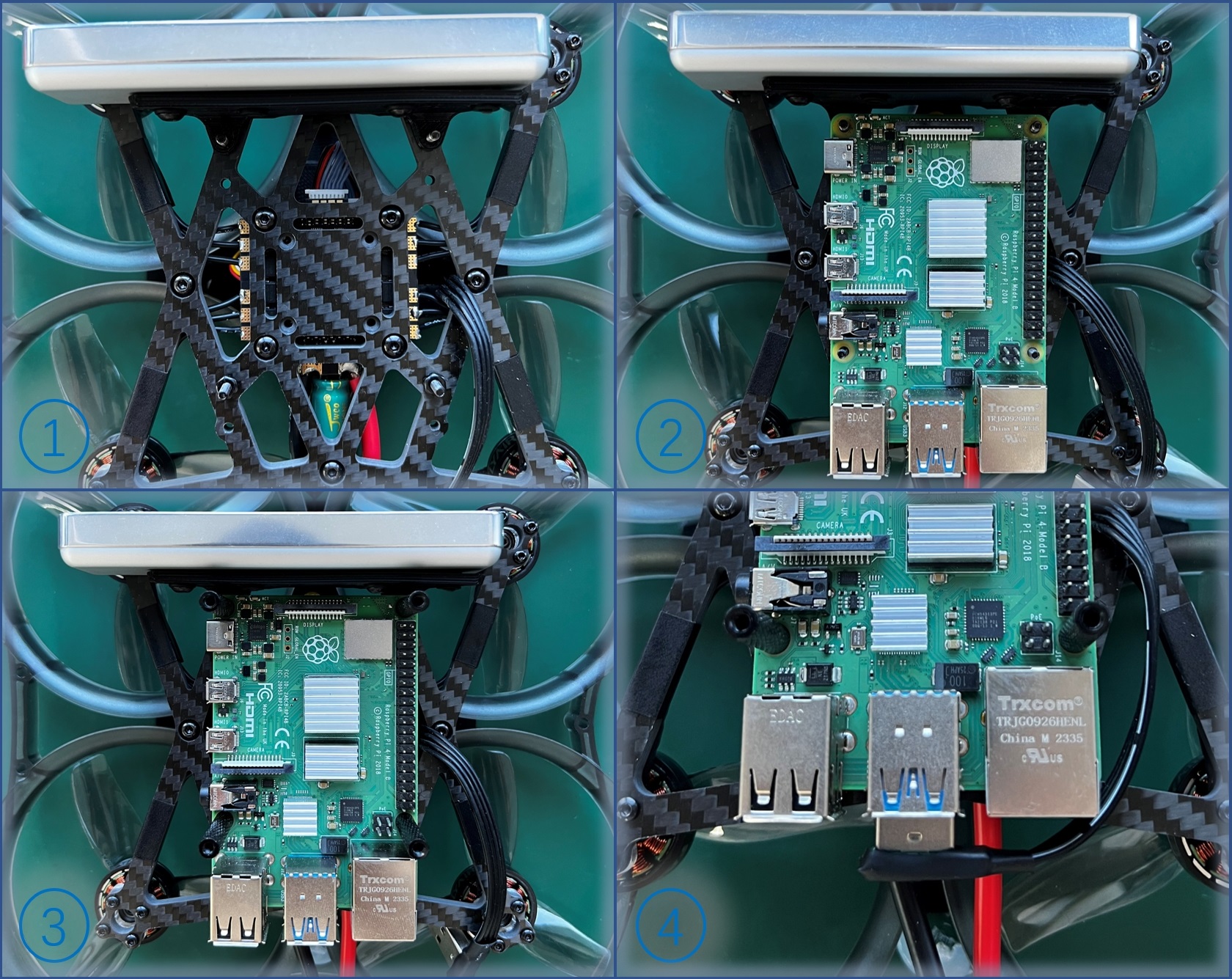
8. 安装树莓派
-
将 2 颗 M2.5✖12mm 圆头螺丝和 M2.5 螺母固定到碳纤板孔位上
-
将 TF 卡插入树莓派卡槽
-
将树莓派安装到碳纤板上 M2.5 螺丝位置,并使用配套的 M2.5✖25mm 铝柱进行固定
-
将连接飞控的 USB A - C 弯头数据线插入树莓派 USB 口
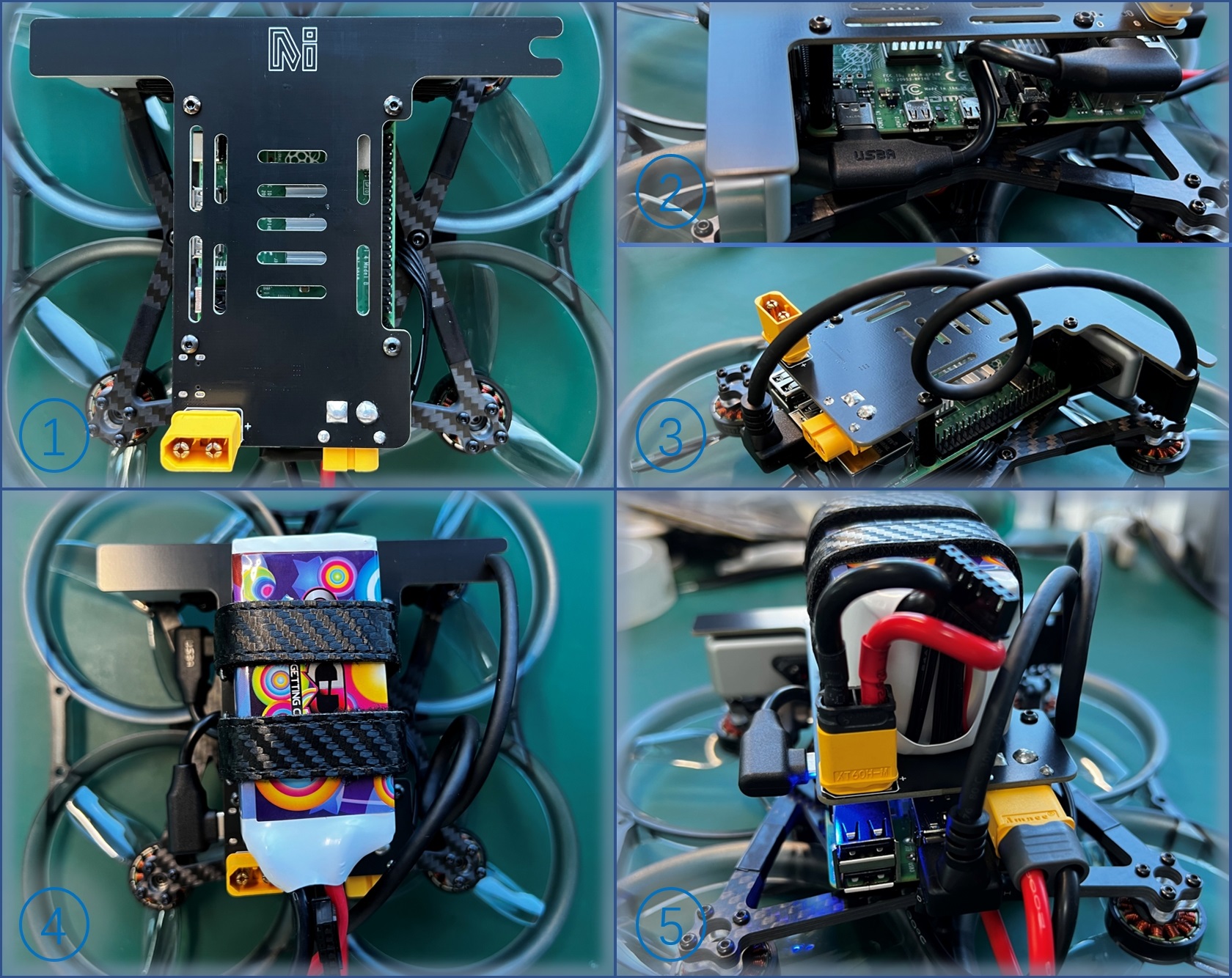
9. 安装供电板
-
使用 4 颗 M2.5✖6mm 圆头螺丝将供电板固定到树莓派铝柱上
-
插入 USB C - C 弯头电源线连接供电板和树莓派
-
连接视觉传感器与树莓派(T265 版 使用 Micro USB - USB 3.0 弯头数据线连接;D435i 版 使用 USB A - C 3.0 弯头数据线连接)
-
电池绑带穿过供电板并将电池固定到供电板上方
-
将电调供电口插入稳压板,电池插入稳压板即整机上电
飞行平台概览
MVD35-T265
-
整机重量:约 645 g
-
轴距:152mm
-
悬停续航(载荷正常工作):约 13 min
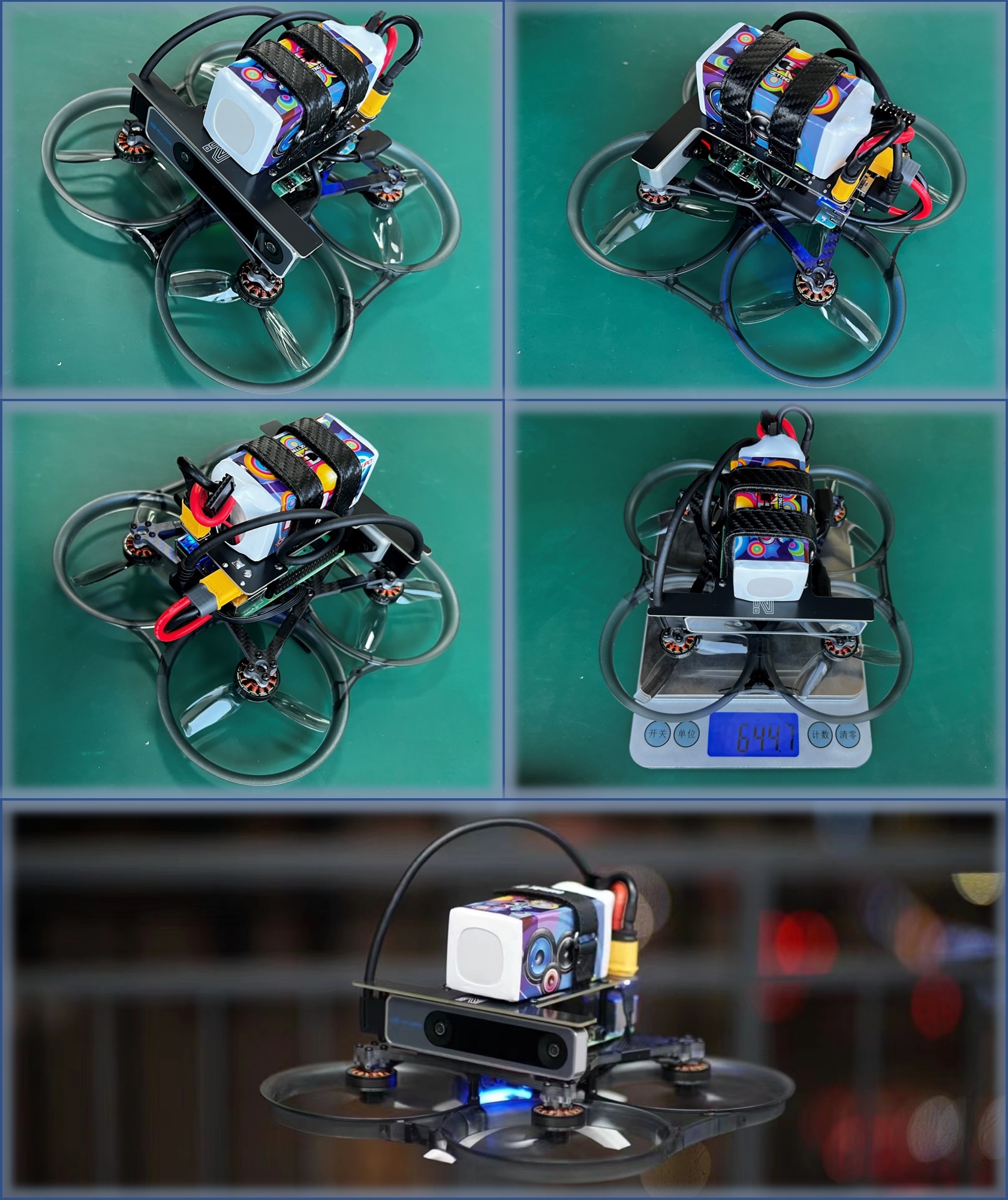
MVD35-D435i
-
整机重量:约 660 g
-
轴距:152mm
-
悬停续航(载荷正常工作):约 12 min
至此飞行平台搭建完成,后续内容请参考微空科技无人机视觉导航教程系列《飞控基础设置篇(Ardupilot及PX4)》
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)