PX4 Mavros Topic 消息频率修改
【视频教程】PX4 MAVROS Topic 消息频率修改 提高飞控IMU数据输出频率
方法一:在线指令修改 Mavros Topic 消息频率
1. 连接飞控
通过USB连接MicoAir743飞控至电脑
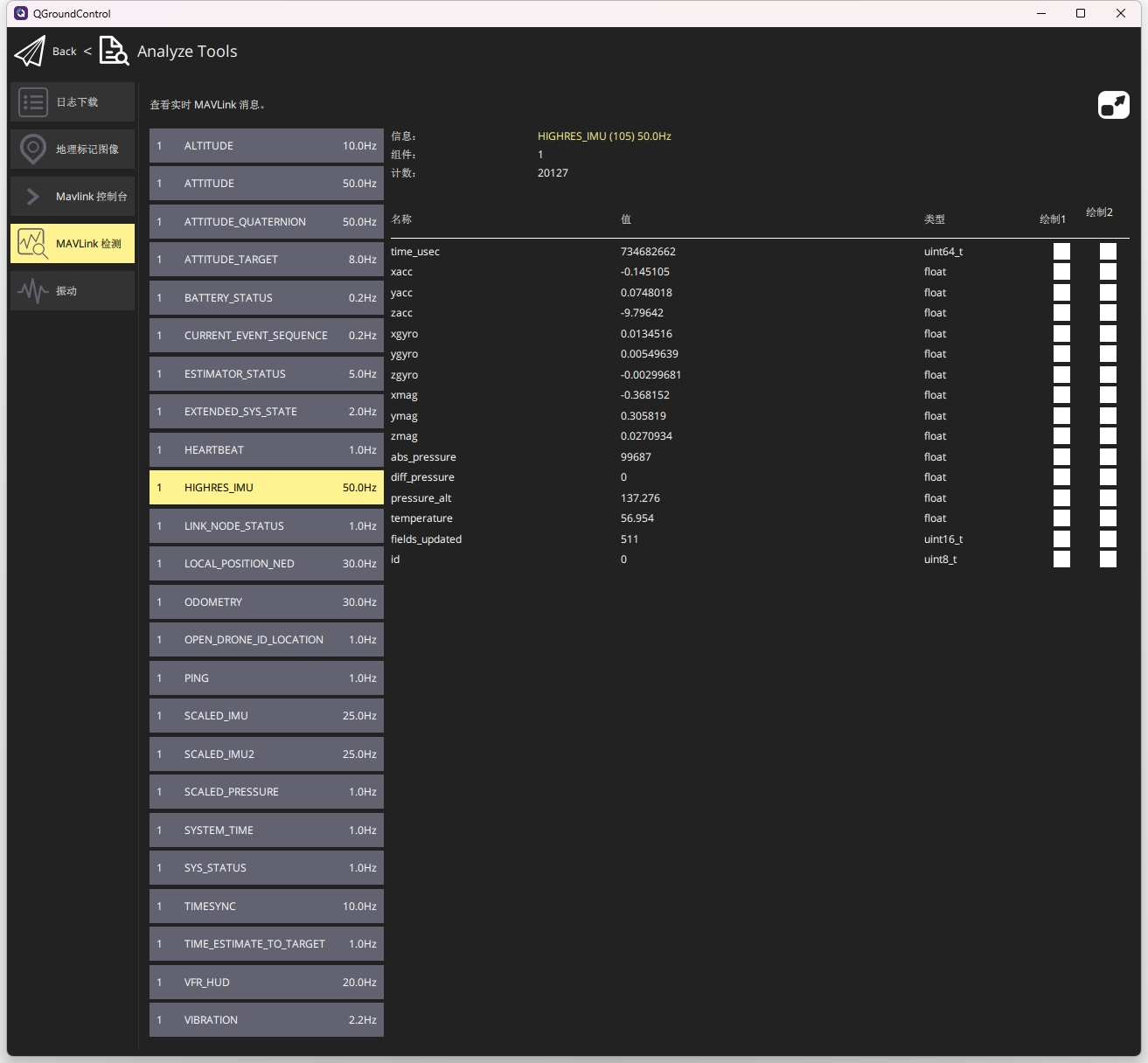
2. 查看 Mavros Topic 消息频率
QGroundControl -> Analyze Tools -> MAVLink 检测
3. 输入Mavros Topic 消息频率修改指令
切换到QGroundControl -> Analyze Tools -> MAVLink 控制台 ,输入以下指令:
mavlink stream -d /dev/ttyACM0 -s HIGHRES_IMU -r 100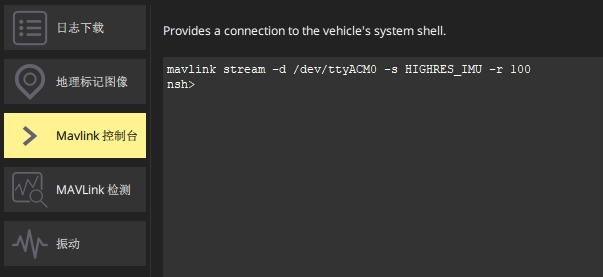
-
ttyACM0 表示 USB
-
HIGHRES_IMU 表示指定修改频率的 Mavros Topic
-
100 表示 指定发送频率;
-
代码表示设置 HIGHRES_IMU 发送到 USB 口的数据频率为 100Hz
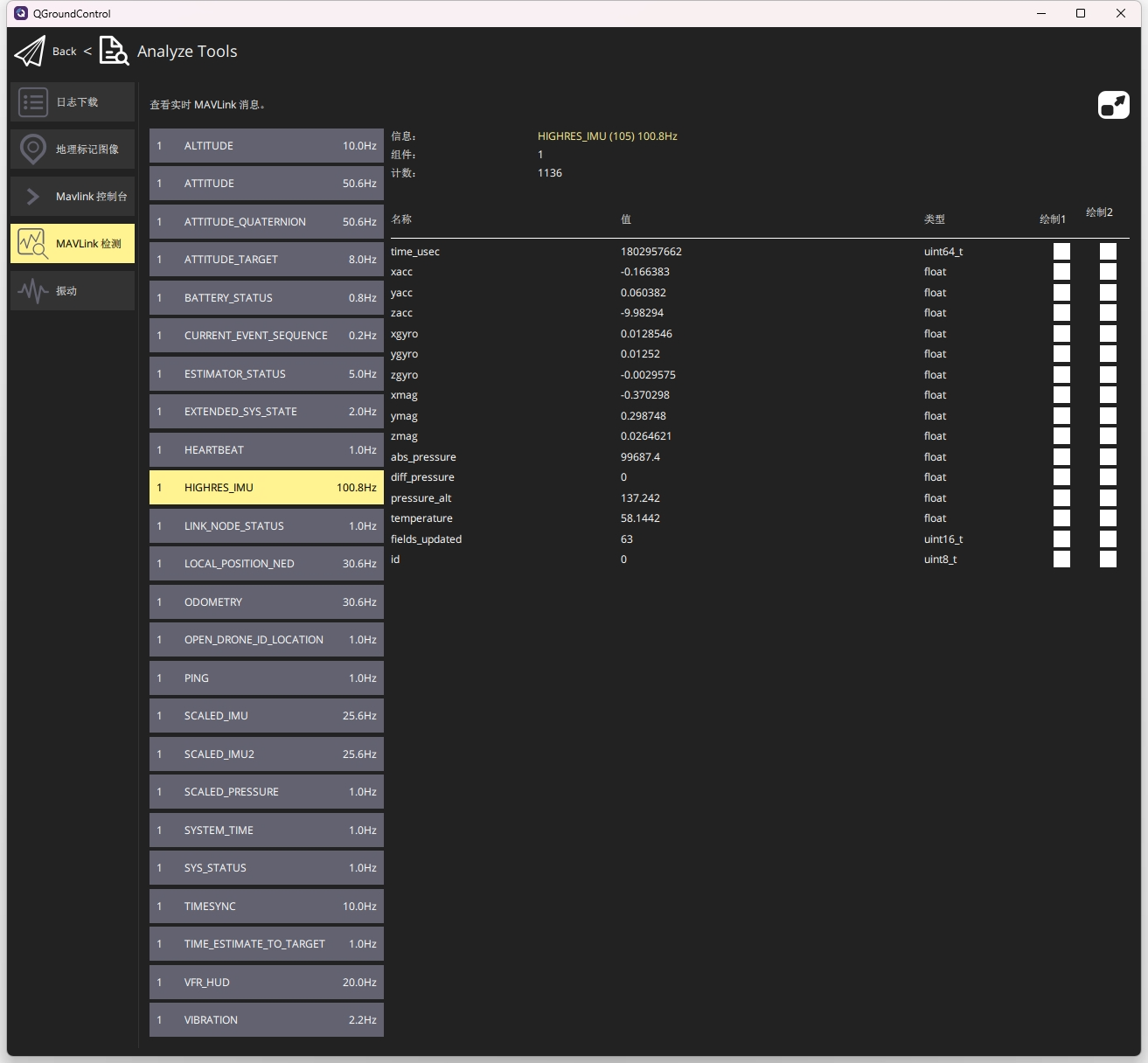
4. 验证修改后 Mavros Topic 消息频率
注意:
-
飞控串口硬件序号参考飞控说明文档(如,MicoAir743 Telem1 为 ttyS0;NxtPX4v2 Telem1 为 ttyS1)
-
如果使用串口,该串口模式需设置为
Onboard -
发送频率同时受飞控硬件条件和数据链路带宽限制,实际频率不一定能达到设定值;当实际频率未达到设定值的时候,可以将 IMU_GYRO_RATEMAX 参数设置小一些以提高输出的实际频率
-
使用方法一在飞控重启后会恢复成默认速率,需要重新设置
-
设置指令要求指定端口已启动,未启动端口会导致该指令执行失败

方法二:TF 卡离线设置 Mavros Topic 消息频率
1. 在飞控 TF 卡下添加文件
根目录下创建 /etc/extras.txt,编辑加入以下内容:
mavlink start -d /dev/ttyACM0 -b 921600
mavlink stream -d /dev/ttyACM0 -s HIGHRES_IMU -r 2002. 将 TF 卡插回飞控
飞控启动后会执行一次该文件里的指令
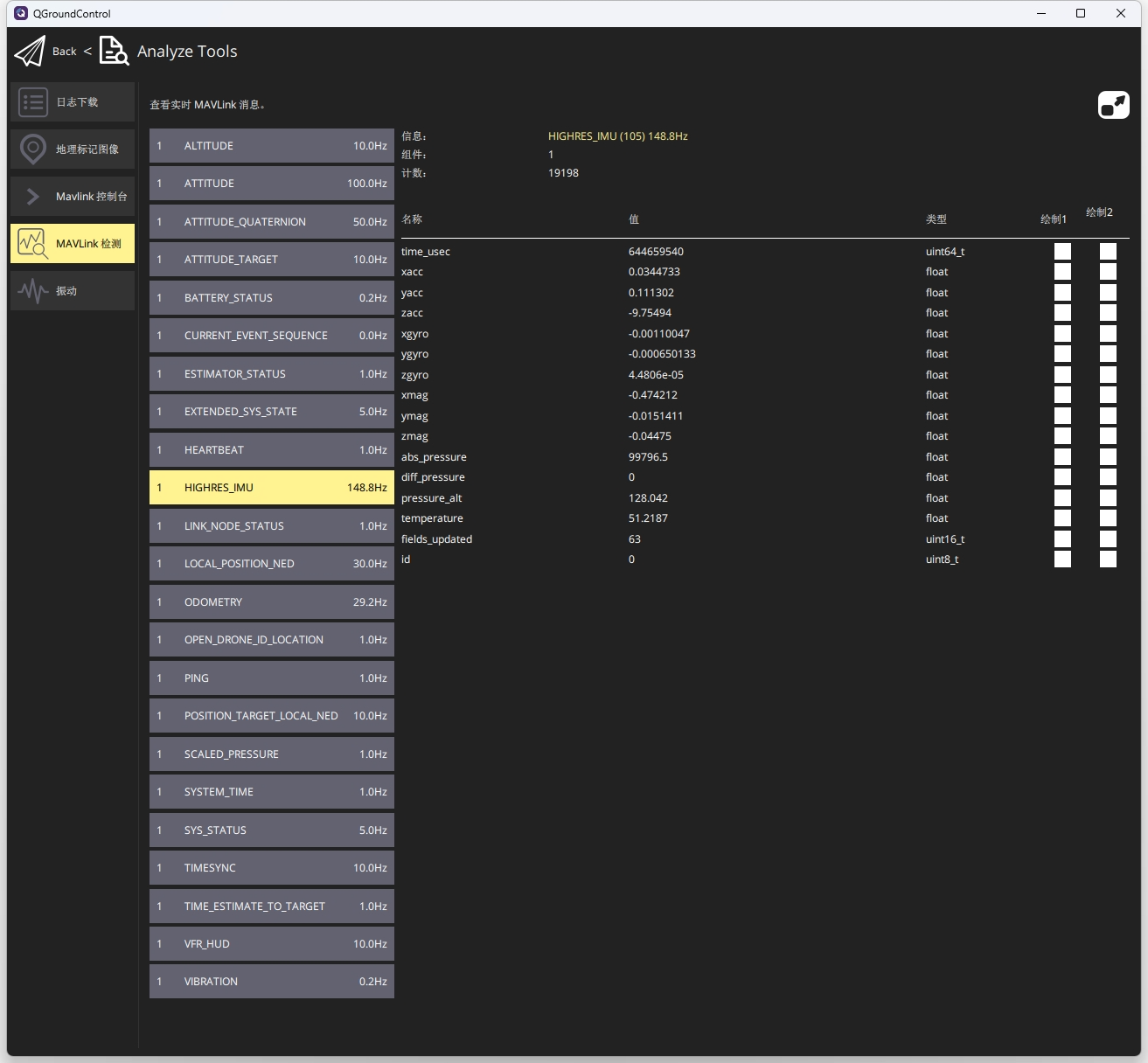
3. 验证是否生效
QGroundControl -> Analyze Tools -> MAVLink 检测
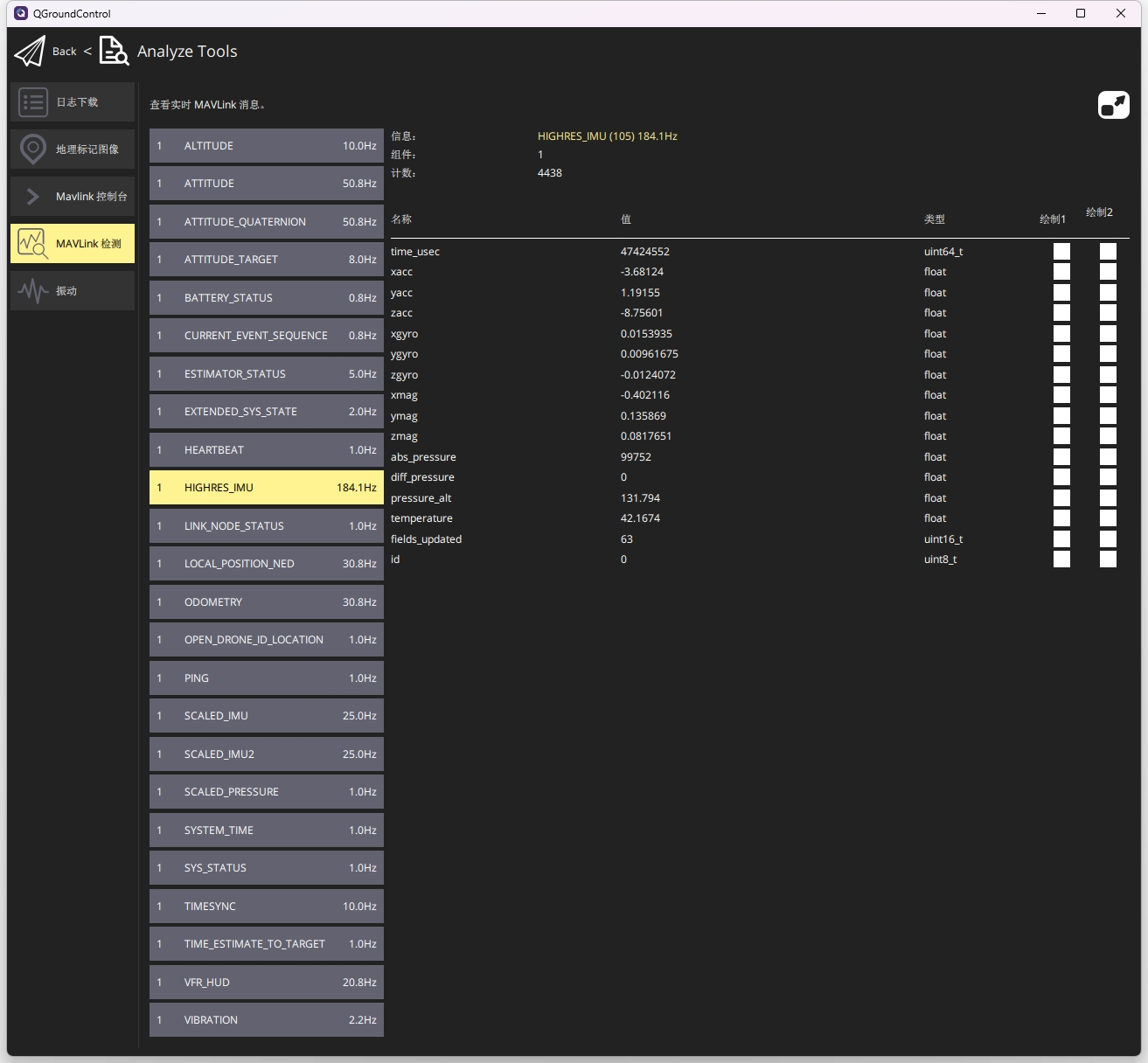
可以看到,设置已经生效,但实际上由于飞控硬件条件限制, HIGHRES_IMU 数据发送频率只有 185Hz 左右;在实际使用中,应该把数据频率控制在能够达到的合适范围,或者尝试:当实际频率未达到设定值的时候,可以将 IMU_GYRO_RATEMAX 参数设置小一些以提高输出的实际频率
注意:
-
飞控上电后,USB 口只有接入电脑或机载电脑后才启动,飞控先启动再接入 USB 口,将导致在执行该文件时指令执行失败,设置发送频率不成功;
-
飞控上电后,串口 (配置过参数的)无论是否接入设备会直接启动,并执行该指令;
方法三:修改源码预设 Mavros Topic 发送频率
MicoAir743 及 NxtPX4v2 飞控板配置文件已合并到 PX4-Autopilot 官方仓库,可自定义修改并编译固件
1. 下载源码并搭建编译环境
参考 PX4-Autppilot 官方教程:https://docs.px4.io/main/en/development/development.html
2. 修改代码
修改 /src/modules/mavlink 文件目录下 mavlink_main.cpp 文件
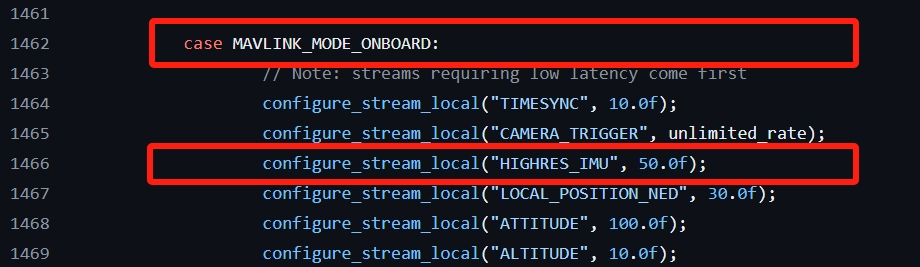
- 使用 串口 获取 Mavros Topic 数据修改 MAVLINK_MODE_ONBOARD 下的设置,找到对应的 Mavros Topic,后面对应的数字为预设发送频率
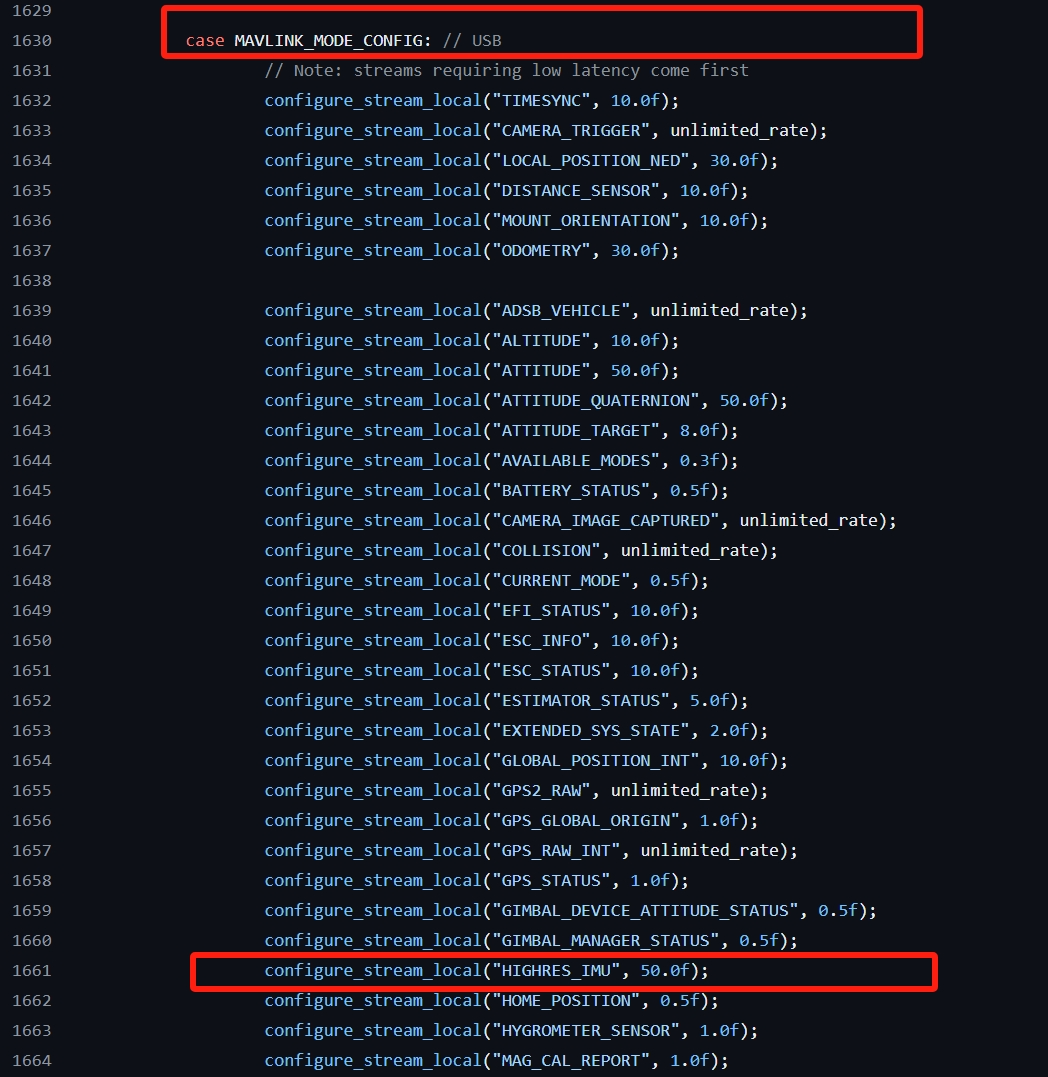
- 使用 USB 获取 Mavros Topic 数据修改 MAVLINK_MODE_CONFIG 下的设置,找到对应的 Mavros Topic,后面对应的数字为预设发送频率
3. 编译指定固件
编译MicoAir743飞控的PX4固件
make micoair_h743_default编译NxtPX4v2飞控的PX4固件
make hkust_nxt-dual_default4. 使用 QGroundControl 重新烧录固件
5. 修改 HIGHRES_IMU 为 XXXHz 并验证
在代码中修改为了150Hz并在QGC中验证
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)