请输入
菜单
Micolink协议定义与解析
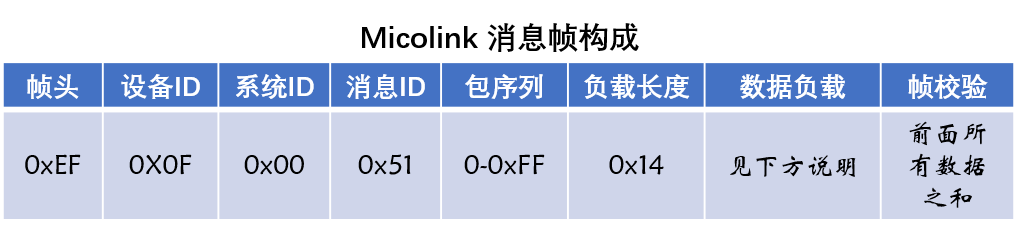
Micolink是微空科技定义的一种轻量级通信协议,主要用于串口传输传感器数据。
协议定义
协议解析参考
mtf01.h
#pragma once
#include <stdint.h>
#include <stdbool.h>
#include <string.h>
#define MICOLINK_MSG_HEAD 0xEF
#define MICOLINK_MAX_PAYLOAD_LEN 64
#define MICOLINK_MAX_LEN MICOLINK_MAX_PAYLOAD_LEN + 7
/*
消息ID定义
*/
enum
{
MICOLINK_MSG_ID_RANGE_SENSOR = 0x51, // 测距传感器
};
/*
消息结构体定义
*/
typedef struct
{
uint8_t head;
uint8_t dev_id;
uint8_t sys_id;
uint8_t msg_id;
uint8_t seq;
uint8_t len;
uint8_t payload[MICOLINK_MAX_PAYLOAD_LEN];
uint8_t checksum;
uint8_t status;
uint8_t payload_cnt;
} MICOLINK_MSG_t;
/*
数据负载定义
*/
#pragma pack (1)
// 测距传感器
typedef struct
{
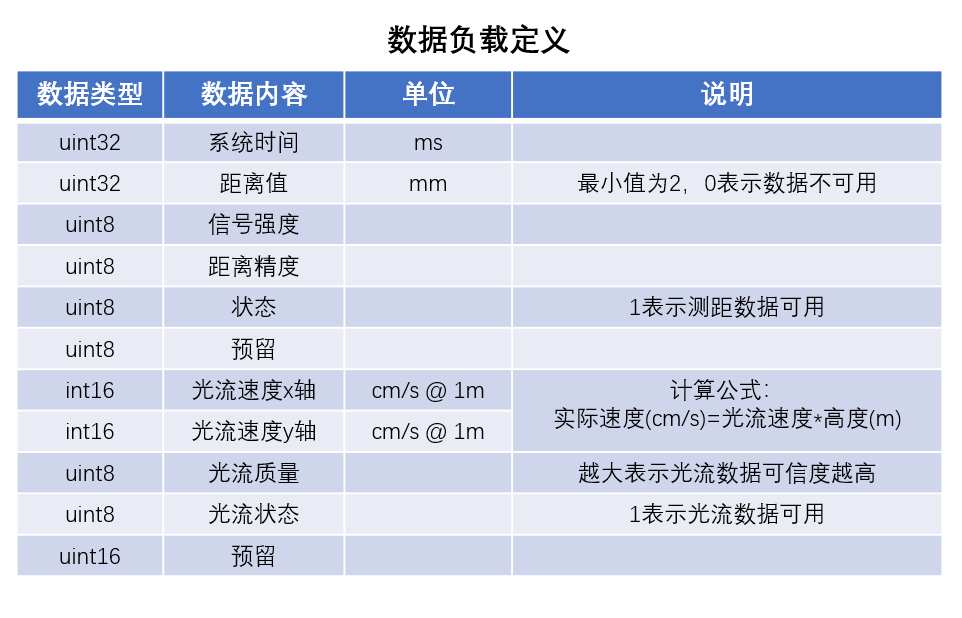
uint32_t time_ms; // 系统时间 ms
uint32_t distance; // 距离(mm) 最小值为10,0表示数据不可用
uint8_t strength; // 信号强度
uint8_t precision; // 精度
uint8_t tof_status; // 状态
uint8_t reserved1; // 预留
int16_t flow_vel_x; // 光流速度x轴
int16_t flow_vel_y; // 光流速度y轴
uint8_t flow_quality; // 光流质量
uint8_t flow_status; // 光流状态
uint16_t reserved2; // 预留
} MICOLINK_PAYLOAD_RANGE_SENSOR_t;
#pragma pack ()mtf01.c
#include "mtf01.h"
/*
说明: 用户使用micolink_decode作为串口数据处理函数即可
距离有效值最小为10(mm),为0说明此时距离值不可用
光流速度值单位:cm/s@1m
飞控中只需要将光流速度值*高度,即可得到真实水平位移速度
计算公式:实际速度(cm/s)=光流速度*高度(m)
*/
bool micolink_parse_char(MICOLINK_MSG_t* msg, uint8_t data);
void micolink_decode(uint8_t data)
{
static MICOLINK_MSG_t msg;
if(micolink_parse_char(&msg, data) == false)
return;
switch(msg.msg_id)
{
case MICOLINK_MSG_ID_RANGE_SENSOR:
{
MICOLINK_PAYLOAD_RANGE_SENSOR_t payload;
memcpy(&payload, msg.payload, msg.len);
/*
此处可获取传感器数据:
距离 = payload.distance;
强度 = payload.strength;
精度 = payload.precision;
距离状态 = payload.tof_status;
光流速度x轴 = payload.flow_vel_x;
光流速度y轴 = payload.flow_vel_y;
光流质量 = payload.flow_quality;
光流状态 = payload.flow_status;
*/
break;
}
default:
break;
}
}
bool micolink_check_sum(MICOLINK_MSG_t* msg)
{
uint8_t length = msg->len + 6;
uint8_t temp[MICOLINK_MAX_LEN];
uint8_t checksum = 0;
memcpy(temp, msg, length);
for(uint8_t i=0; i<length; i++)
{
checksum += temp[i];
}
if(checksum == msg->checksum)
return true;
else
return false;
}
bool micolink_parse_char(MICOLINK_MSG_t* msg, uint8_t data)
{
switch(msg->status)
{
case 0: //帧头
if(data == MICOLINK_MSG_HEAD)
{
msg->head = data;
msg->status++;
}
break;
case 1: // 设备ID
msg->dev_id = data;
msg->status++;
break;
case 2: // 系统ID
msg->sys_id = data;
msg->status++;
break;
case 3: // 消息ID
msg->msg_id = data;
msg->status++;
break;
case 4: // 包序列
msg->seq = data;
msg->status++;
break;
case 5: // 负载长度
msg->len = data;
if(msg->len == 0)
msg->status += 2;
else if(msg->len > MICOLINK_MAX_PAYLOAD_LEN)
msg->status = 0;
else
msg->status++;
break;
case 6: // 数据负载接收
msg->payload[msg->payload_cnt++] = data;
if(msg->payload_cnt == msg->len)
{
msg->payload_cnt = 0;
msg->status++;
}
break;
case 7: // 帧校验
msg->checksum = data;
msg->status = 0;
if(micolink_check_sum(msg))
{
return true;
}
default:
msg->status = 0;
msg->payload_cnt = 0;
break;
}
return false;
}上一个
MTF-02/02P光流测距一体传感器-用户手册
下一个
MT-01P/06/15激光测距
最近修改: 2024-07-05Powered by;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)
大纲