MTF-01P光流测距一体传感器-用户手册
简介
MTF-01P是微空科技研发设计并生产的一款光流测距一体传感器,采用串口输出数据,并内置多种通信协议,可兼容主流开源飞控:Ardupilot、PX4、INAV、FMT。只需简单配置即可适配不同飞控。
依靠MTF-01P传感器,无人机可以实现室内无GPS环境下的自主悬停飞行。

MTF-01P基于MTF-01升级而来,测距量程更大,精度更高。
产品购买
产品参数
- 测距范围:0.02-12m@90%反射率(600Lux); 0.01-8m@90%反射率(70KLux);
- 测距精度:4cm(0.02-2m@90%反射率);2%(>2m@90%反射率)
- 测距光源:激光
- 中心波长:808nm
- 测距视场角:1.5°
- 光流视场角:42°
- 最大光流测量速度:7m/s(一米高度时)
- 光流最小工作距离:8cm
- 光流环境光需求:>60Lux
- 通信接口:LVTTL(3.3V)串口 波特率115200
- 数据频率:100Hz
- 供电电压:5V
- 平均工作电流:100mA
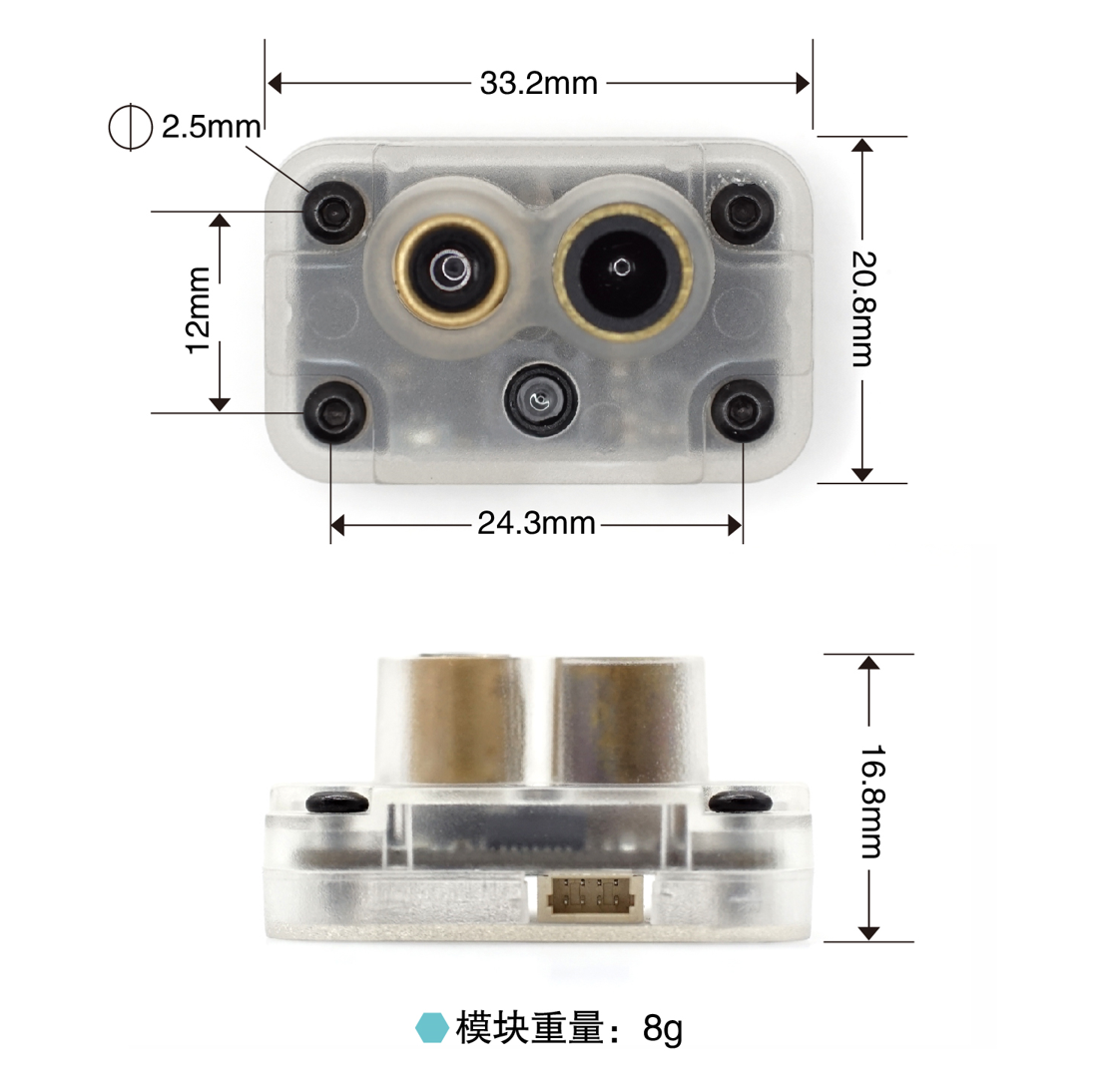
产品尺寸
- 定位孔间距:24.3 x 12mm, Φ2.5mm
- 模块尺寸:33.2 x 20.8 x 16.8mm
- 重量:8g
接口定义
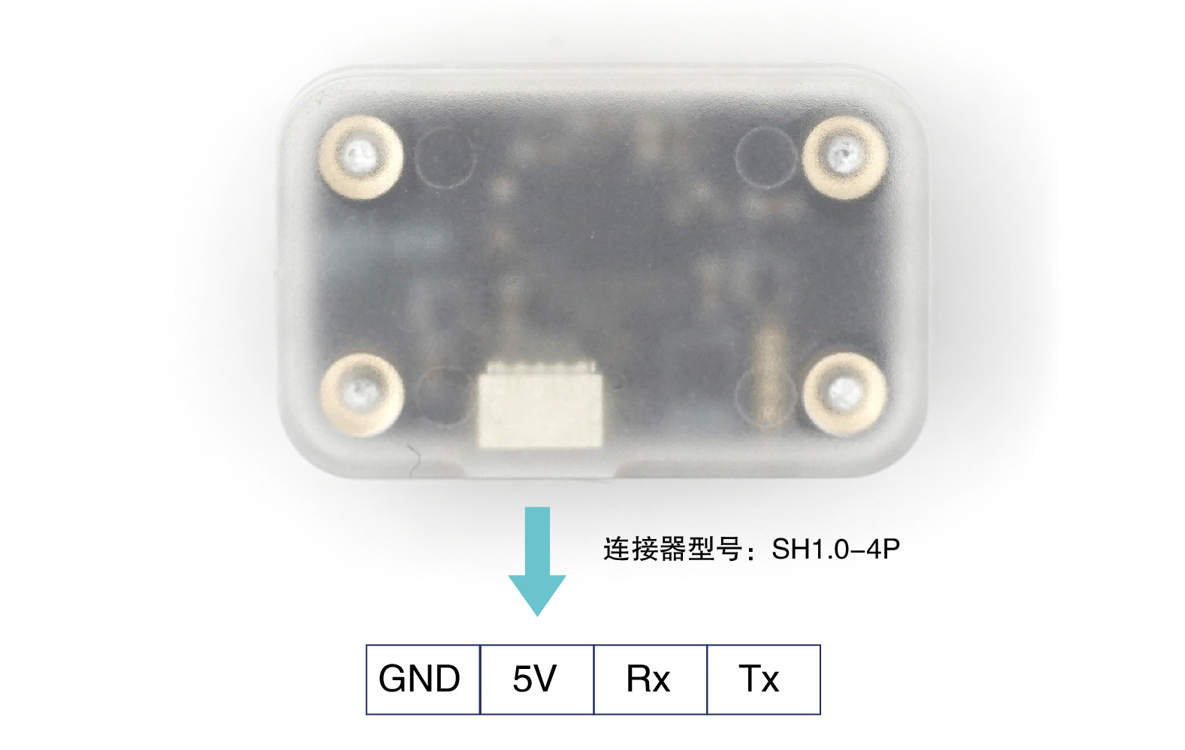
- GND: 电源GND
- 5V:电源5V
- Rx:串口Rx,接飞控串口Tx
- Tx:串口Tx,接飞控串口Rx
飞控连接示意

安装方向
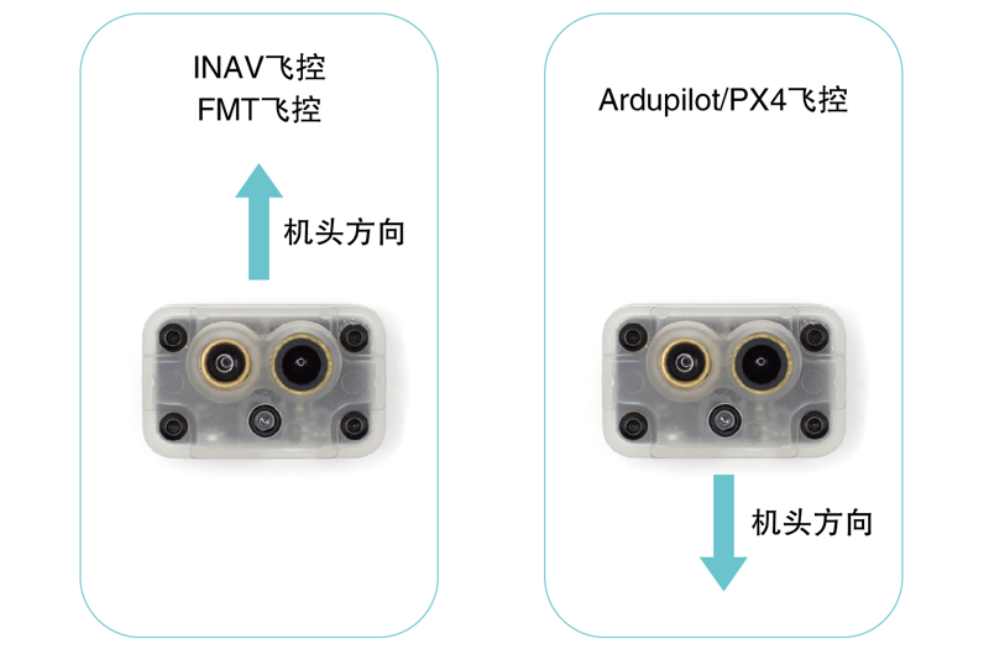
也可以在微空助手中调整方向参数
协议说明
MTF-01支持四种数据协议:
- Micolink:一种自定义协议,可以支持FMT飞控,也可以用于自主开发使用。
- Mavlink_apm: mavlink协议,支持ardupilot飞控固件
- Mavlink_px4: mavlink协议,支持PX4飞控固件
- MSP: 支持INAV飞控固件
可以使用微空助手软件切换模块协议或修改其它参数:
Micolink协议具体说明可参考下面链接:
飞控配置教程
[视频教程]Ardupilot&PX4飞控配置使用MTF-01光流测距一体传感器实现室内悬停飞行
Ardupilot
MTF-01模块输出协议需要设置成mav_apm(或购买产品时直接选择ardupilot版本)
Ardupilot固件版本需>=4.2.0
SERIALn_BAUD 115
SERIALn_OPTIONS 1024(Don't forward)
SERIALn_PROTOCOL 1
FLOW_TYPE 5
RNGFND1_TYPE 10
(n取决于实际连接的物理端口)
重启飞控或者刷新参数
RNGFND1_MAX_CM 800
RNGFND1_MIN_CM 1
RNGFND1_ORIENT 25
配置EKF参数(只使用光流)
AHRS_EKF_TYPE 3
EK3_SRC_OPTIONS 0
EK3_SRC1_POSXY 0
EK3_SRC1_POSZ 2
EK3_SRC1_VELXY 5
EK3_SRC1_VELZ 0
EK3_SRC1_YAW 1
配置EKF参数(光流和GPS手动切换,进阶操作,新手勿尝试)
AHRS_EKF_TYPE 3
EK3_SRC_OPTIONS 0
EK3_SRC2_POSXY 0
EK3_SRC2_POSZ 2
EK3_SRC2_VELXY 5
EK3_SRC2_VELZ 0
EK3_SRC2_YAW 1
RC6_OPTION 90 (设置使用RC6通道切换EKF数据源, 通道值处于中间位置时使用SRC2的数据,即使用光流辅助定位)
注意:
如果在参数列表中找不到FLOW_TYPE参数,首先请确认ardupilot固件版本>=4.2.0,如果版本没问题,那说明是飞控固件禁用光流功能了,这个大多出现在F405飞控上,因为flash大小限制需要阉割部分功能,详情可以咨询飞控厂家。
PX4
MTF-01模块输出协议需要设置成mav_px4(或购买产品时直接选择PX4版本)
1.14.0版本以后需要设置好所有其它参数,并识别到光流传感器,重启飞控后才能在QGC里找到SENS_FLOW_ROT参数
1.12.x - 1.13.x
MAV_1_CONFIG TELEM n (n取决于实际连接的物理端口)
重启飞控
MAV_1_MODE Normal
SER_TELn_BAUD 115200 8N1 (n取决于实际连接的物理端口)
SENS_FLOW_ROT No rotation
EKF2_AID_MASK use optical flow
EKF2_RNG_AID Range aid enable
EKF2_HGT_MODE Range sensor
1.14.x-
MAV_1_CONFIG TELEM n
重启飞控
MAV_1_MODE Normal
SER_TELn_BAUD 115200 8N1
EKF2_OF_CTRL Enabled
EKF2_RNG_CTRL Enabled
EKF2_HGT_REF Range sensor
重启飞控
SENS_FLOW_ROT No rotation (1.14及以后版本该参数默认值如此,无需设置)
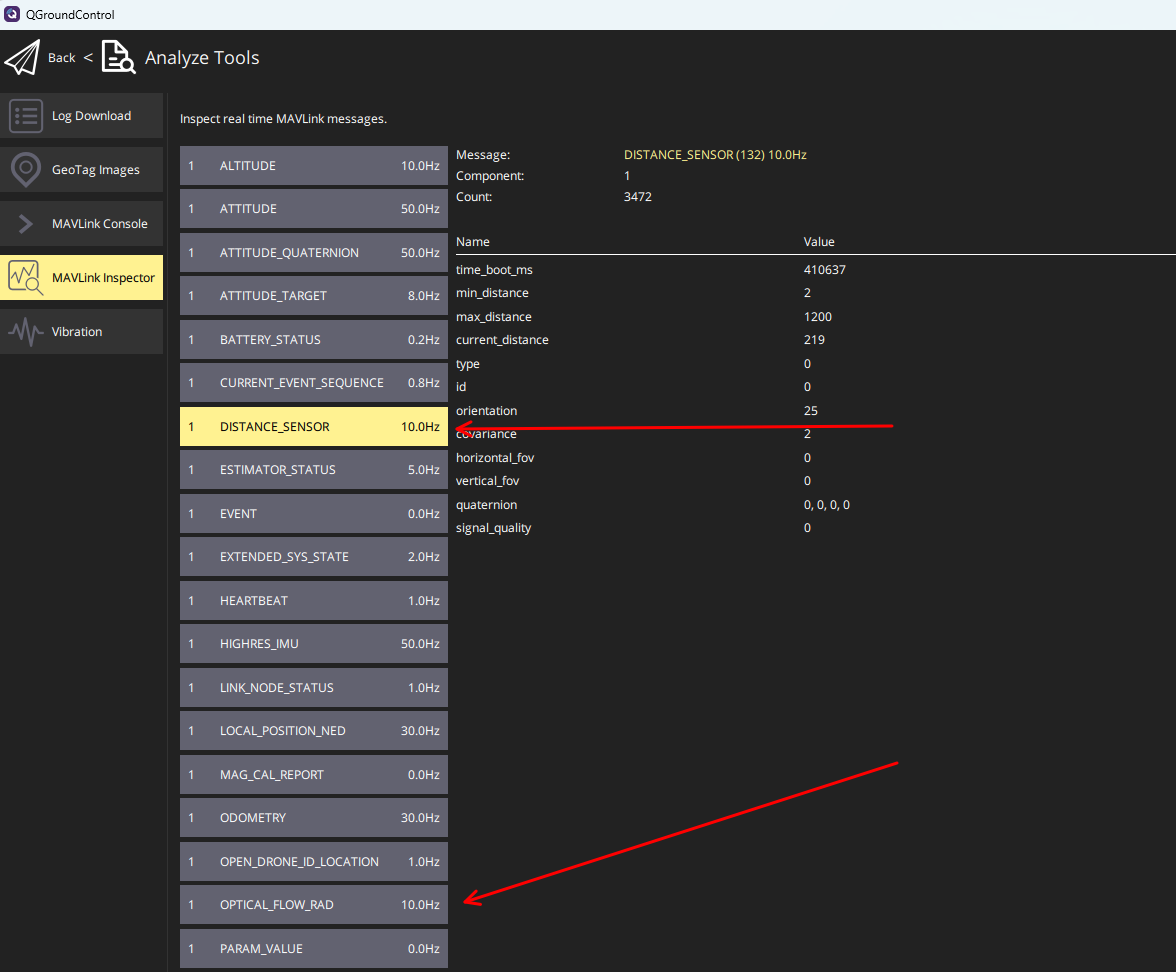
重启飞控,一切正常的话,在QGC的MAVLink Inspector页面中应该能看到DISTANCE_SENSOR和OPTICAL_FLOW_RAD消息。注意,QGC上显示的消息由飞控发出,消息频率并不等同于传感器的数据频率,这个频率由飞控的设置和数据链路的速度决定,主要用于观察,消息频率多少并不重要。
如果地面站是通过某些数传连接飞控时,由于数据链路速率较低,飞控会选择性发出数据,导致在QGC有可能看不到某些消息帧比如OPTICAL_FLOW_RAD,因此这一步建议使用USB连接飞控。
INAV
MTF-01模块输出协议需要设置成msp(或购买产品时直接选择INAV版本)
另外INAV 7.1.1版本存在BUG,无法正常使用传感器,建议升级或者降级其它版本。
[视频教程] INAV飞控配置使用MTF-01光流测距一体传感器实现室内悬停飞行
FAQ常见问题
1.飞控地面站上可以看到distance数据但没有光流数据
可能有两种情况:
一是模块协议和飞控固件不匹配,比如飞控是Ardupilot固件但光流模块协议设置成了mav_px4,或者飞控是PX4固件时模块协议设置成了mav_apm。
二是使用PX4时,电脑使用数传连接飞控,由于数据链路带宽较低,飞控只会选择性发送部分数据到QGC,所以只能看到distance消息而没有光流消息。需要使用USB连接飞控到电脑,再观察消息是否正常。
另外PX4飞控发往地面站的消息频率是可变的,根据数据链路带宽调整,发到QGC的消息频率和传感器实际的数据频率并不是一回事。
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)