微空无人机视觉导航教程4-树莓派镜像迁移使用
微空科技无人机视觉导航教程系列包含:
-
树莓派镜像迁移使用
-
双目VIO算法实现与应用(树莓派5+D435i)
-
拓展应用案例
《树莓派镜像迁移使用篇》以 微空科技 MVD35 飞行平台为例,介绍如何使用微空科技公开的配置镜像文件、修改配置,使用本地 WIFI,以及如何将自己后期开发的内容打包为镜像进行迁移等。各个部分关联度较小,按照实际使用需求修改相应部分即可。
MVD35 套件购买
准备内容
1. 硬件准备
-
树莓派 4B (T265 版)/ 树莓派 5 (D435i 版)(4GB RAM 版本)
-
32G TF 存储卡及读卡器
-
HDMI - Micro HDMI 数据线
-
WIFI 网络条件(无需科学上网)
2. 软件准备
-
Raspberry Pi Imager,官方下载链接:https://www.raspberrypi.com/software/ (选装,镜像烧录工具)
-
Win32DiskImager,下载链接:https://sourceforge.net/projects/win32diskimager/ (选装,镜像制作与烧录工具)
-
MobaXterm,官方下载链接:https://mobaxterm.mobatek.net/download-home-edition.html (远程终端工具)
-
MVD35_T265_Raspi4B.img,搭配 Ardupilot 固件镜像下载链接:https://pan.baidu.com/s/1wMUVS5oxcaXGa3Cp5eX5dg?pwd=3dna ;搭配 PX4 固件镜像下载链接:https://pan.baidu.com/s/1Tp5uEBhApbGIsq7UmbVc5w?pwd=w7of (选装,MVD35_T265_Raspi4B.img 镜像中包含了《机载电脑环境配置篇》中包含选装部分在内的全部配置)
-
MVD35_D435i_Raspi5.img(选装,MVD35_D435i_Raspi5.img 镜像中包含了《双目VIO算法实现与应用篇》中包含选装部分在内的全部配置)
3. Ubuntu 使用技巧
-
Ctrl + C结束进程;或在需要输入密码处取消sudo指令 -
vim 编辑器
i或insert键进入编辑,ESC键进入命令模式:wq命令保存并退出
镜像本地化使用
1. 烧录 MVD35 镜像
MVD35 飞行平台中 TF 卡已配置好软件并测试通过,本地化使用时仅需 配置树莓派 WIFI,其它未配置软件的 TF 卡可参考《机载电脑环境配置篇》或《双目VIO算法实现与应用篇》进行配置与测试,也可通过直接烧录微空科技公开的 MVD35 镜像省去配置过程
- 方法一:使用 Raspberry Pi Imager 烧录镜像
-
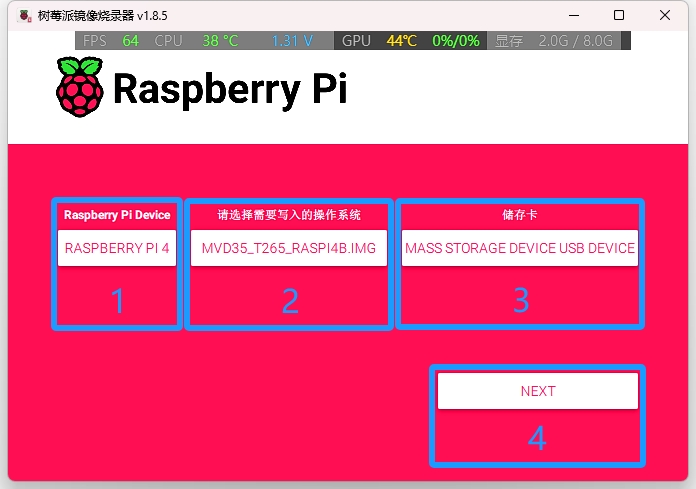
将 TF 卡通过读卡器接入电脑,安装并打开 Raspberry Pi Imager:
-
Raspberry Pi Device 根据 MVD35 飞行平台版本选择(MVD35-T265 版 选择 RASPBERRY PI 4;MVD35-D435i 版 选择 RASPBERRY PI 5);
-
操作系统选择 Use custom 根据 MVD35 飞行平台版本选择下载解压好的镜像(MVD35-T265 版 选择 MVD35_T265_Raspi4B.img;MVD35-D435i 版 选择 MVD35_D435i_Raspi5.img);
-
储存卡选择插入的 TF 卡;
-
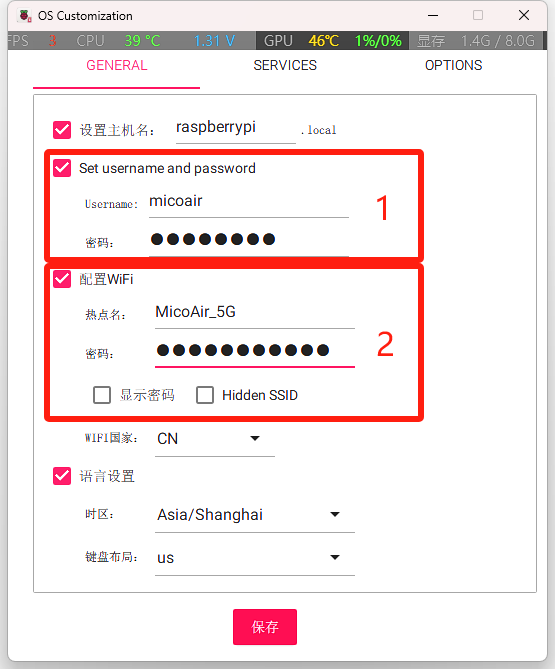
点击 NEXT,在弹出的窗口中选择 编辑设置:
-
设置账号及密码(可自定义设置,MVD35 飞行平台统一账号:micoair 密码:12345678)
-
配置本地 WIFI 名称及密码
-
点击 保存 ,并按照默认提示选择 是 写入镜像
- 方法二:使用 Win32DiskImager 烧录镜像
-
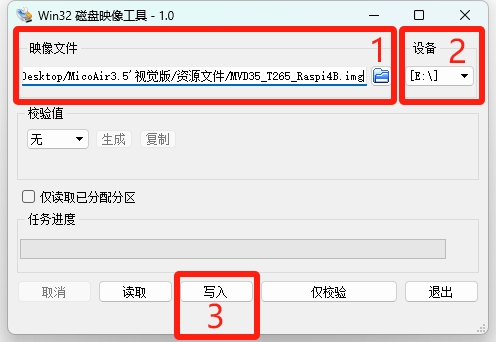
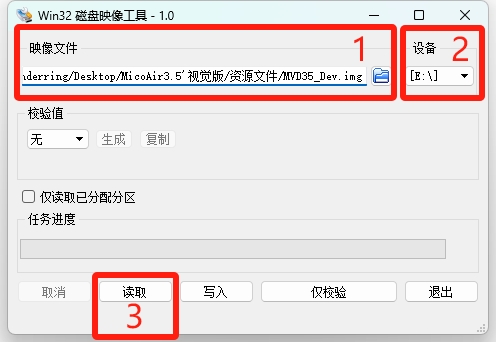
将 TF 卡通过读卡器接入电脑,安装并打开 Win32DiskImager:
-
映像文件 根据 MVD35 飞行平台版本打开下载解压好的镜像(MVD35-T265 版 选择 MVD35_T265_Raspi4B.img;MVD35-D435i 版 选择 MVD35_D435i_Raspi5.img);
-
储存卡选择插入的 TF 卡;
-
点击 写入 开始将镜像文件写入 TF 卡(注意:TF 卡存储空间必须比镜像文件大,否则部分软件功能将会异常且难以查找错误)
2. 配置树莓派 WIFI
MVD35 飞行平台配备的 TF 卡及采用方法二烧录镜像的 TF 卡,需要将树莓派连接 WIFI 配置为本地 WIFI;采用方法一烧录镜像,则不用重新配置树莓派 WIFI
-
将 TF 卡插入树莓派,使用 HDMI - Micro HDMI 将树莓派连接到显示器,接入键盘和电源,启动树莓派
-
输入密码,登录树莓派 (MVD35 飞行平台统一账号:micoair 密码:12345678)
-
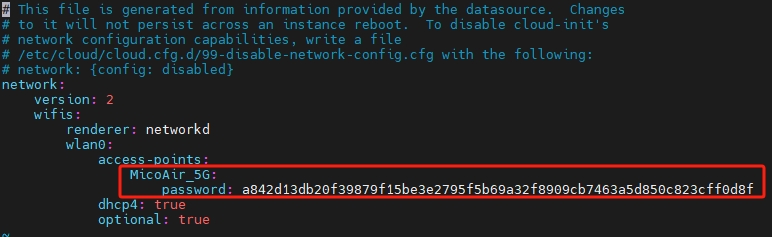
修改 50-clound-init.yaml 配置文件
sudo vim /etc/netplan/50-cloud-init.yaml -
将 WIFI 名称和密码修改为本地 WIFI 名称和密码(password 上一行为 WIFI 名称;password 冒号后有一个空格,注意不要删除该空格)
-
应用更改并重启生效
sudo netplan apply sudo reboot -
重启树莓派 30 秒内,树莓派会自动搜索并连接到配置好的 WIFI
-
进入 WIFI 管理后台查找名称为 raspberrypi 的设备,记录其 IP 地址
3. 节点链路测试
-
局域网登录树莓派
-
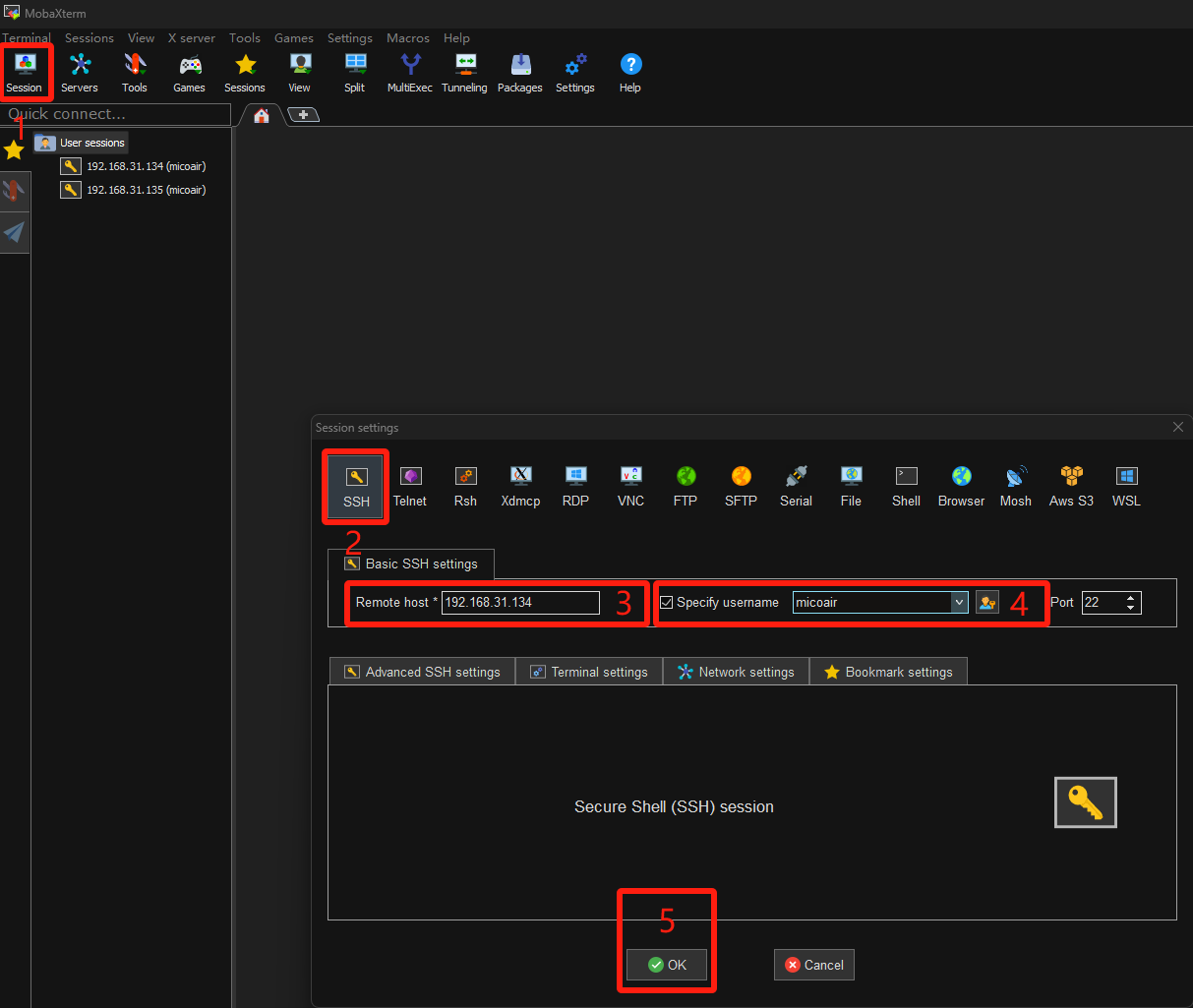
安装并打开 MobaXterm
-
在上方工具栏点击 Session,弹出的界面选择 SSH,在 Remote host 填入树莓派的 IP 地址,勾选 Specify username 并填入用户名(MVD35 飞行平台默认账号:micoair 密码:12345678),点击 OK 进行连接
-
输入密码登录到树莓派(MVD35 飞行平台默认账号:micoair 密码:12345678)
-
-
测试视觉传感器节点(MobaXterm 终端窗口 1)
-
MVD35-T265 版测试 T265 节点
roslaunch realsense2_camera rs_t265.launch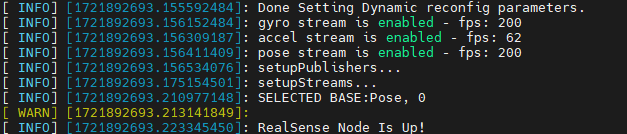
-
MVD35-D435i 版测试 D435i 节点
- 测试 mavros 节点(MobaXterm 终端窗口 2)
-
Ardupilot 固件
roslaunch mavros apm.launch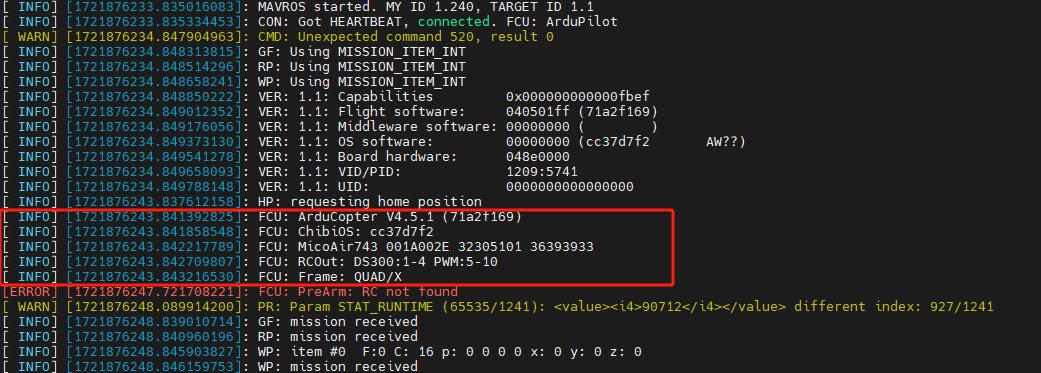
-
PX4 固件
roslaunch mavros px4.launch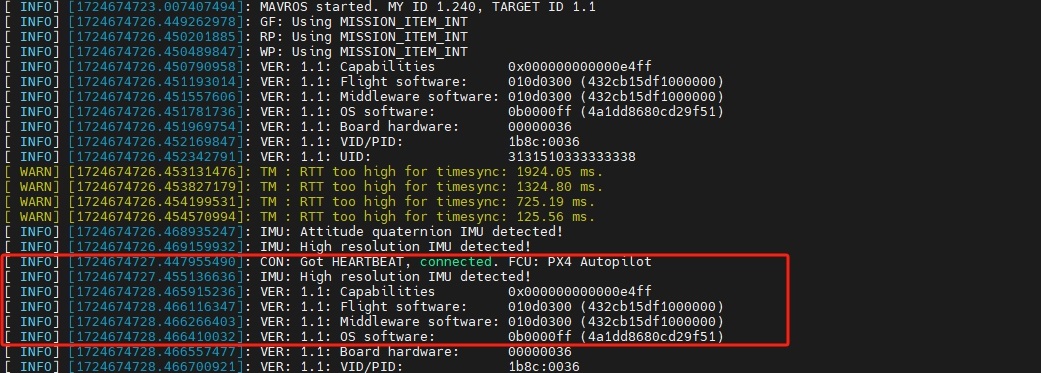
-
测试 vision_to_mavros 节点(MobaXterm 终端窗口 3)
roslaunch vision_to_mavros t265_tf_to_mavros.launch
-
查看数据及状态(MobaXterm 终端窗口 4)
-
位置与方向数据
rostopic echo /mavros/vision_pose/pose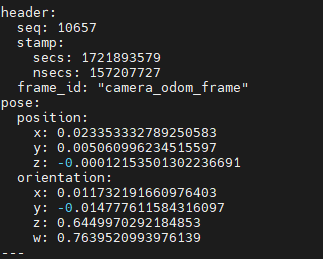
-
数据帧频率
rostopic hz /mavros/vision_pose/pose
-
飞控连接状态
rostopic echo /mavros/state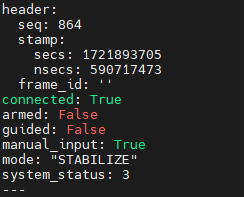
- 测试全部节点(结束其它终端节点进程后进行测试)
- Ardupilot 固件
-
t265_all_nodes.launch 脚本可同时启动 T265, mavros, vision_to_mavros 节点,默认启动 mavros 节点为 apm.launch
-
确认 t265_all_nodes.launch 脚本 mavros 节点为 apm.launch
vim vision_ws/src/vision_to_mavros/launch/t265_all_nodes.launch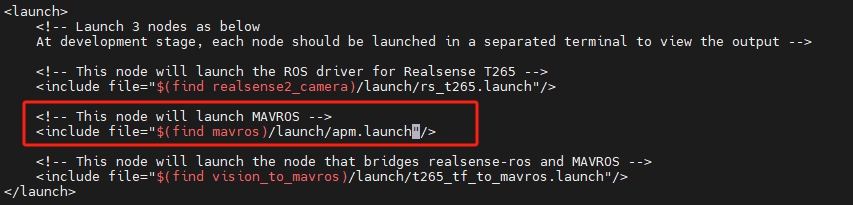
-
启动 t265_all_nodes.launch 脚本
roslaunch vision_to_mavros t265_all_nodes.launch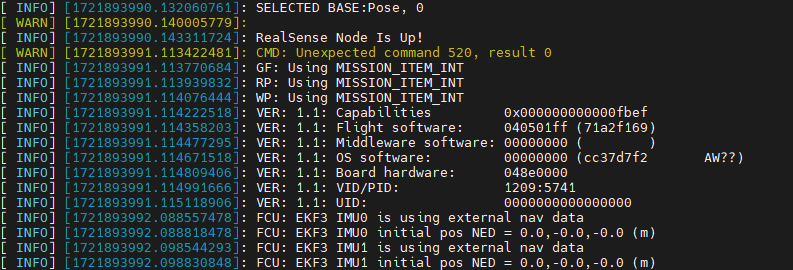
- PX4 固件
-
t265_all_nodes.launch 脚本可同时启动 T265, mavros, vision_to_mavros 节点,默认启动 mavros 节点为 apm.launch
-
修改 t265_all_nodes.launch 脚本 mavros 节点为 px4.launch
vim vision_ws/src/vision_to_mavros/launch/t265_all_nodes.launch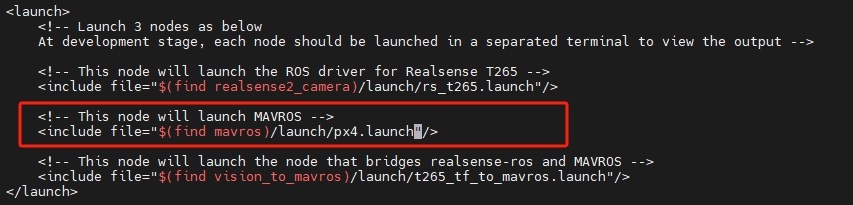
-
启动 t265_all_nodes.launch 脚本
roslaunch vision_to_mavros t265_all_nodes.launch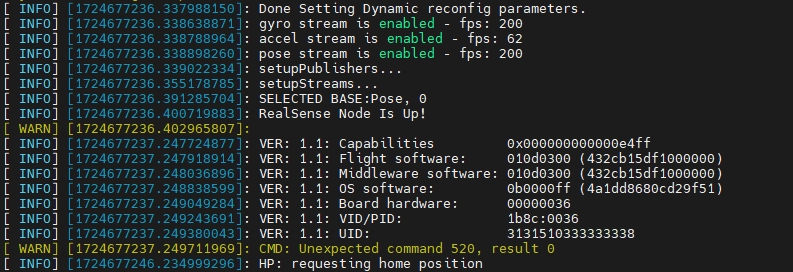
迁移自定义镜像
在 MVD35 飞行平台开发自定义功能后,可通过将 TF 卡内容制作成镜像进行复制和迁移,复制迁移后,可参考以上内容进行异地化配置和使用
-
将 TF 卡从树莓派取出,通过读卡器接入电脑
-
在电脑上创建任意文件,并将文件名(包含扩展名)修改为 xxx.img
-
安装并打开 Win32DiskImager
-
映像文件 打开创建的 xxx.img,设备 选择插入的 TF 卡;
-
点击 读取 开始将 TF 卡内容写入镜像
-
制作完成镜像,建议打包成压缩包(压缩比很高),便于传输
-
镜像异地化部署,可参考上述内容
节点测试通过,则硬件连接与识别正常,后续内容请参考微空科技无人机视觉导航教程系列《视觉导航设置与飞行实践篇(Ardupilot及PX4)》
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)