微空无人机视觉导航教程3-机载电脑环境配置(树莓派4B+T265)
微空科技无人机视觉导航教程系列包含:
-
机载电脑环境配置(树莓派4B+T265)
-
双目VIO算法实现与应用(树莓派5+D435i)
-
拓展应用案例
《机载电脑环境配置(树莓派4B+T265)》以 微空MVD35(T265 版)飞行平台为例,视觉传感器采用 T265,机载电脑采用 树莓派4B,介绍机载电脑的配置过程;MVD35飞行平台支持 Ardupilot 及 PX4 固件,本篇统一进行介绍,配置过程 Ardupilot 和 PX4 的不同之处会分别指出;关于 MVD35(D435i 版)飞行平台的机载电脑配置过程,参考《双目VIO算法实现与应用(树莓派5+D435i)》
MVD35 套件购买
0. 准备内容
-
硬件准备
-
T265 及 USB A - Micro USB 3.0 数据线
-
树莓派 4B (4GB RAM 版本)
-
32G TF 存储卡及读卡器
-
WIFI 网络条件(无需科学上网)
-
-
软件准备
-
Raspberry Pi Imager,官方下载链接:https://www.raspberrypi.com/software/
-
MobaXterm,官方下载链接:https://mobaxterm.mobatek.net/download-home-edition.html
-
-
使用技巧
-
MobaXterm,鼠标右键为粘贴快捷键
-
Ctrl + C结束进程;或在需要输入密码处取消sudo指令 -
vim 编辑器
i或insert键进入编辑,ESC键进入命令模式:wq命令保存并退出
-
1. 烧录镜像
工具:Raspberry Pi Imager,官方下载链接:https://www.raspberrypi.com/software/
-
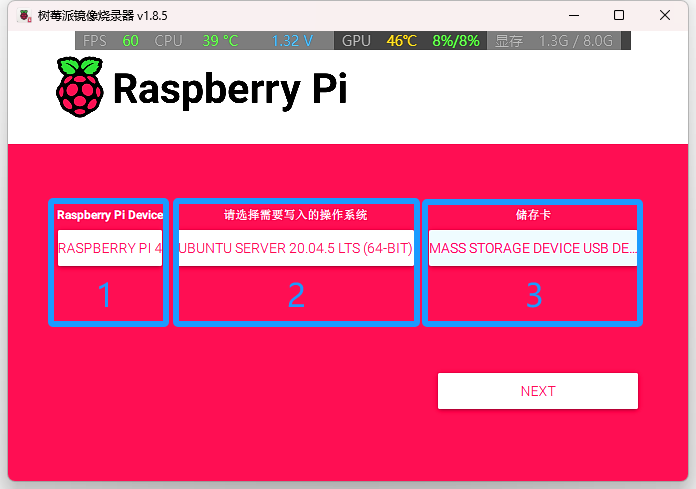
将 TF 卡通过读卡器接入电脑,安装并打开 Raspberry Pi Imager:
-
Raspberry Pi Device 选择 RASPBERRY PI 4;
-
操作系统选择 Other general-purpose OS -> Ubuntu -> Ubuntu Server 20.04.5 LTS (64-bit);
-
储存卡选择插入的 TF 卡;
-
-
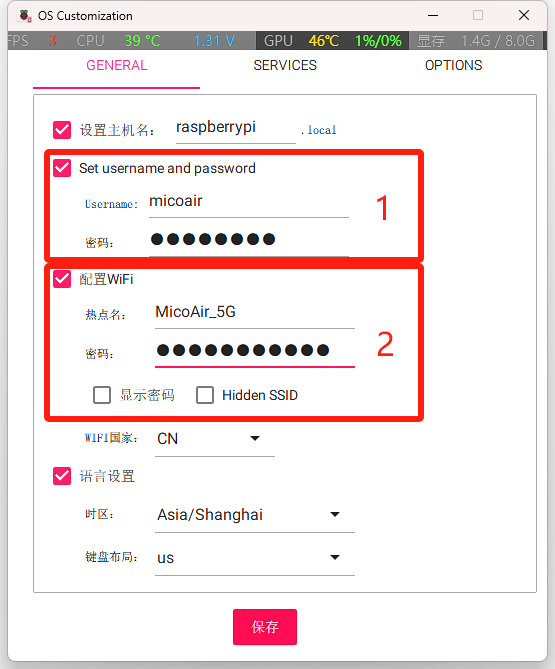
点击 NEXT,在弹出的窗口中选择 编辑设置:
-
设置账号及密码(微空MVD35 飞行平台统一账号:micoair 密码:12345678)
-
配置 WIFI 名称及密码
-
-
点击 保存 ,并按照默认提示选择 是 写入镜像
2. 连接树莓派
工具:MobaXterm,官方下载链接:https://mobaxterm.mobatek.net/download-home-edition.html
-
获取树莓派 IP
-
将烧录好镜像的 TF 卡插入树莓派,接入电源即启动树莓派(启动树莓派后 30 秒内,树莓派会自动搜索并连接到步骤 1. 中配置的 WIFI)
-
进入 WIFI 管理后台找到并复制名称为 raspberrypi 设备的 IP 地址
-
-
局域网登录树莓派
-
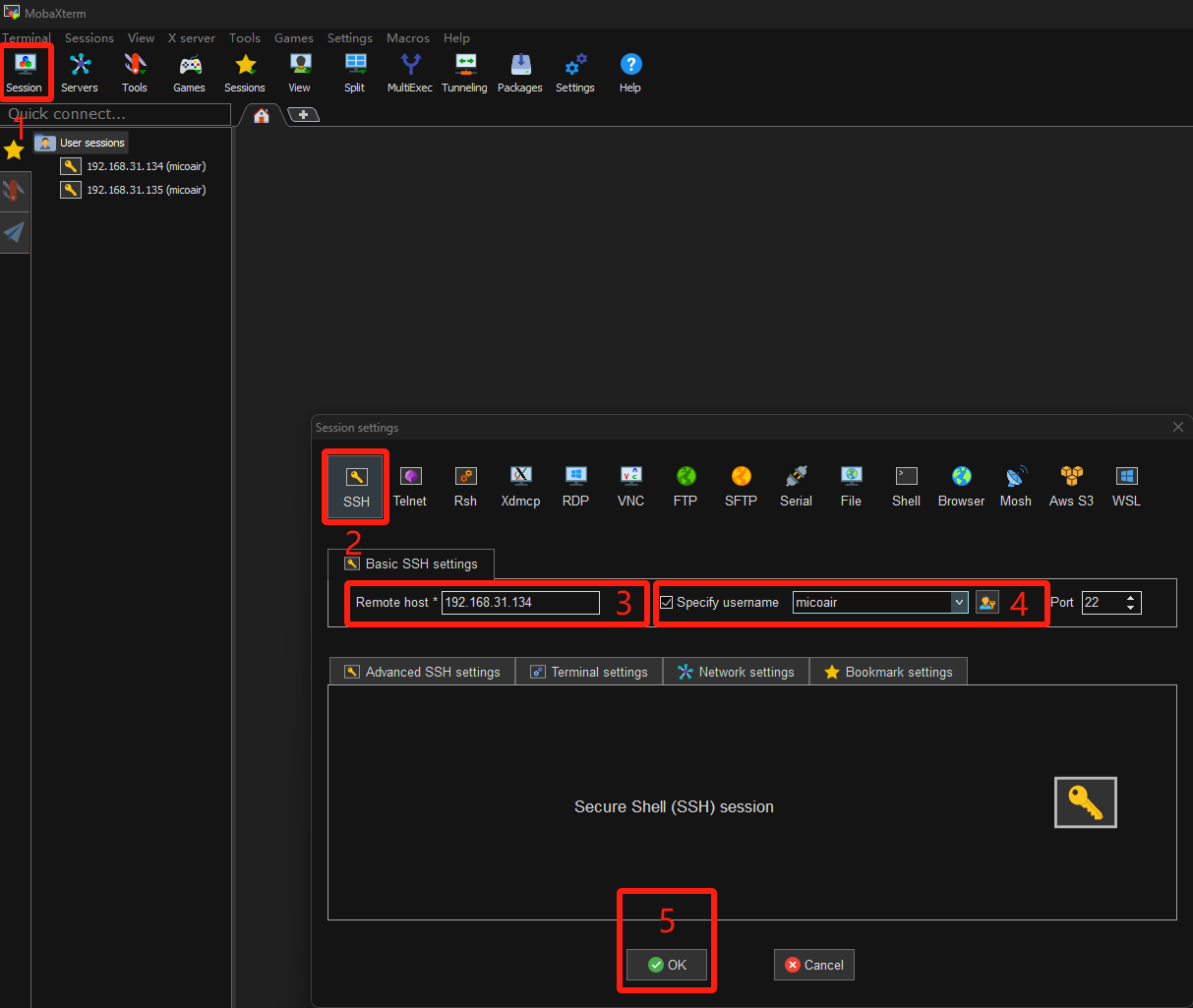
安装并打开 MobaXterm
-
在上方工具栏点击 Session,弹出的界面选择 SSH,在 Remote host 填入树莓派的 IP 地址,勾选 Specify username 并填入步骤 1. 中设置的用户名(MicoAir3.5'视觉版 飞行平台统一账号:micoair 密码:12345678),点击 OK 进行连接
-
输入密码登录到树莓派(微空MVD35 飞行平台统一账号:micoair 密码:12345678)
-
-
更新库文件
sudo apt-get update sudo apt-get upgrade -y
3. 编译安装 librealsense SDK
官方安装文档:https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md
librealsense SDK 没有树莓派的预编译安装包,需要通过板上编译源代码进行安装
-
安装依赖库、编译工具
sudo apt-get install -y libssl-dev libusb-1.0-0-dev libudev-dev pkg-config libgtk-3-dev sudo apt-get install -y git wget cmake build-essential sudo apt-get install -y libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev at -
下载 librealsense2 源代码
git clone https://github.com/IntelRealSense/librealsense.git
-
切换到支持 T265 的分支
cd librealsense git checkout v2.53.1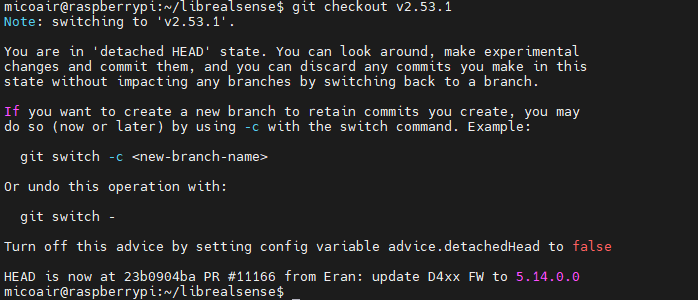
-
运行权限配置脚本
./scripts/setup_udev_rules.sh按照提示断开 T265 并按下任意键运行配置脚本

-
编译 librealsense2 SDK
mkdir build && cd build cmake ../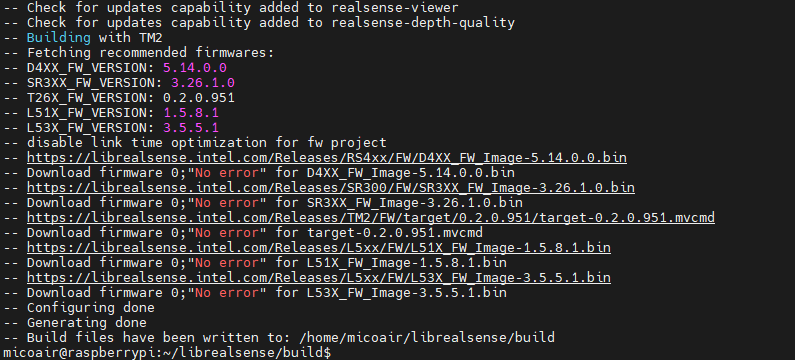
下面开始编译 librealsense SDK,编译过程耗时较长,本教程中使用的树莓派是 4G RAM 版本,可直接进行编译;若使用的树莓派是 2G RAM 版本,需要设置交换空间以避免编译过程内存不足而卡死,设置 2G 大小的交换空间,设置过程可参考:https://www.myfreax.com/how-to-add-swap-space-on-ubuntu-20-04/
make -j4
-
安装及测试
sudo make install realsense-viewer安装完成后,
realsense-viewer指令会打开软件窗口(软件运行在树莓派上,并通过 SSH 连接将软件界面传回,并非运行于本地电脑,所以操作灵敏度不高)。注意:启动 Intel RealSense Viewer 后才能将 T265 插入树莓派 USB3.0 接口;软件会检测 T265 设备并在左侧边栏显示识别到的设备:
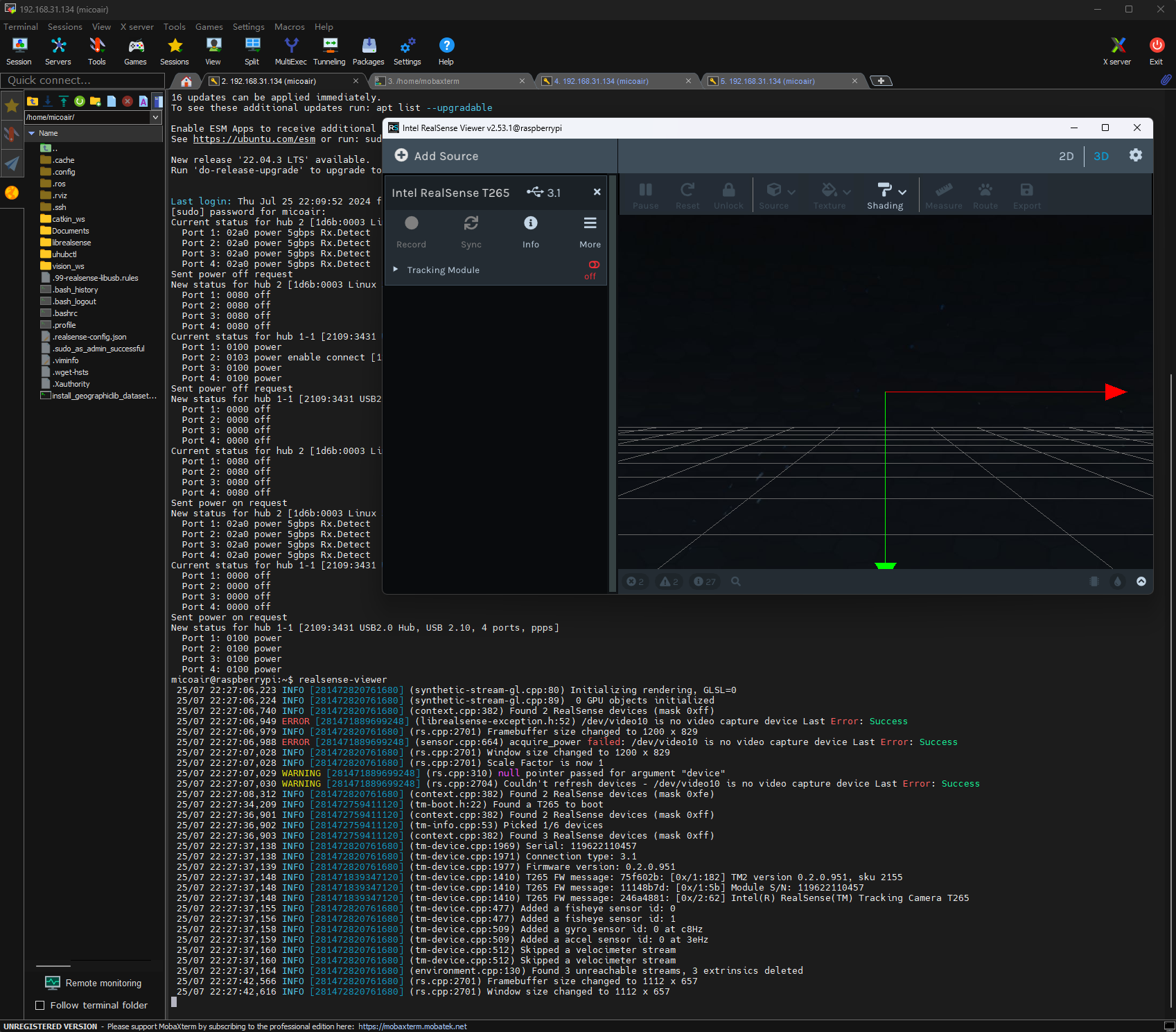
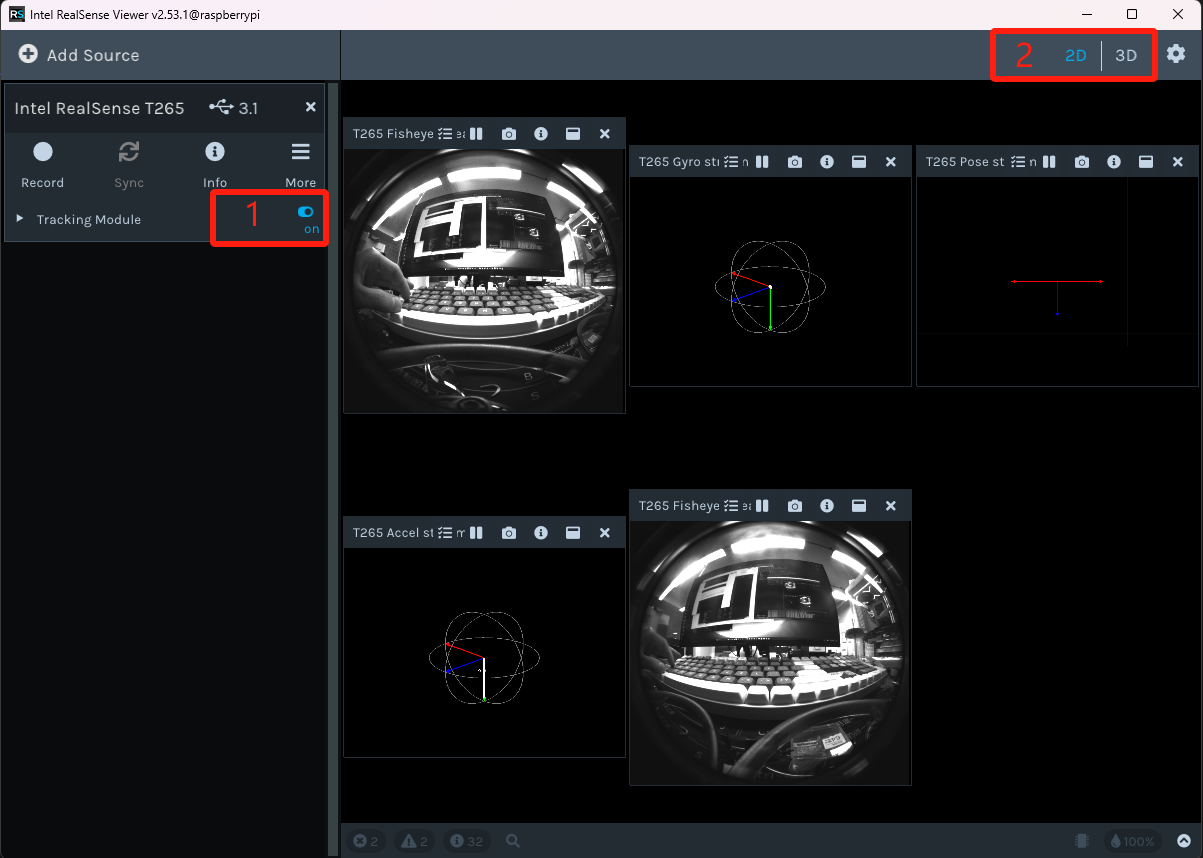
将识别到的 T265 Tracking Module 滑块由 off 切换到 on;
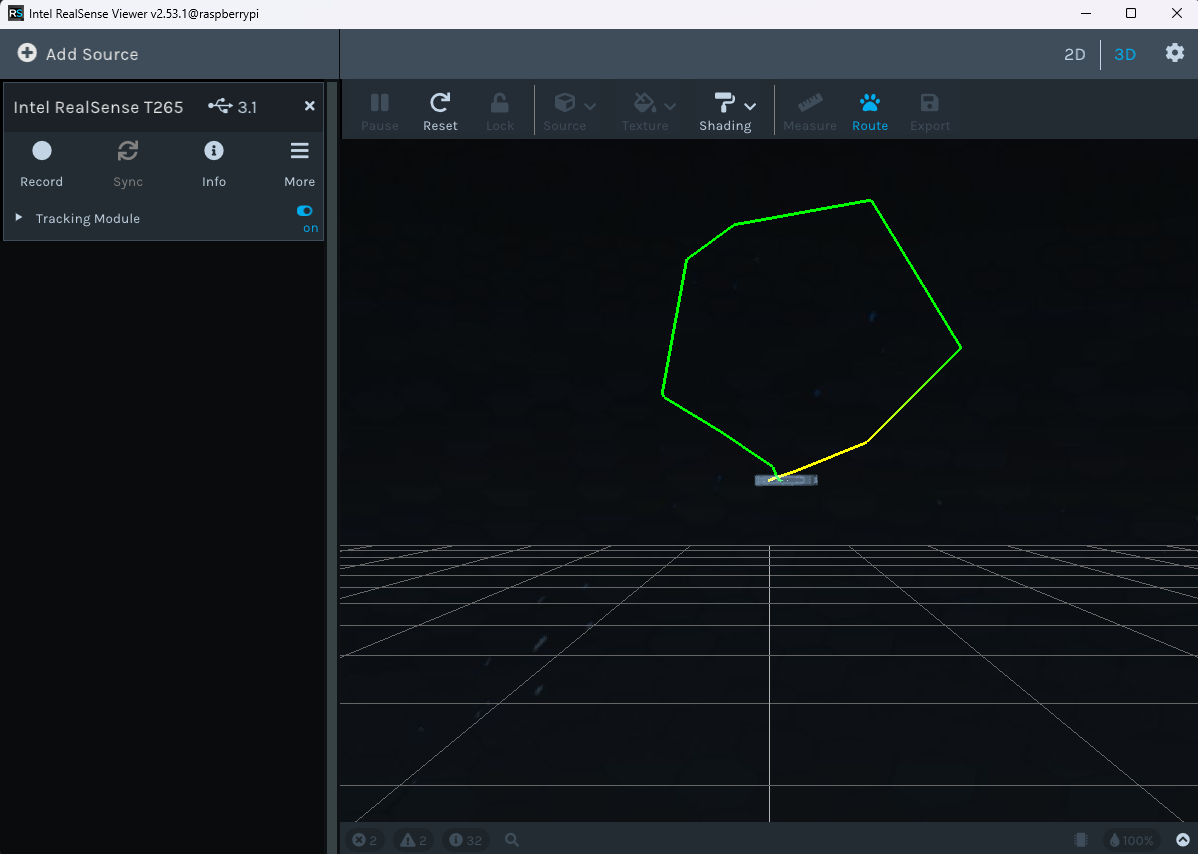
2D 界面显示 T265 鱼眼图像,IMU 和姿态数据;3D 界面显示设备实时姿态及轨迹;可通过右上角按键切换 2D 和 3D 界面;
软件正确识别到 T265 设备且数据显示正常,则 librealsense SDK 安装成功
4. 安装 ROS
官方安装文档:https://wiki.ros.org/noetic/Installation/Ubuntu
-
添加 sources.list 和 keys
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 -
安装桌面完整版
sudo apt update sudo apt install -y ros-noetic-desktop-full -
更新环境配置
source /opt/ros/noetic/setup.bash echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc -
安装 rosdep
sudo apt-get install -y python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential sudo apt install python3-rosdep sudo rosdep init rosdep update执行
sudo rosdep init时,若显示连接不上 githubusercontent,可通过手动添加 host 解决,方法如下:sudo vim /etc/hosts在文档最后添加新行
151.101.84.133 raw.githubusercontent.com保存并退出后,从
sudo rosdep init处继续执行安装过程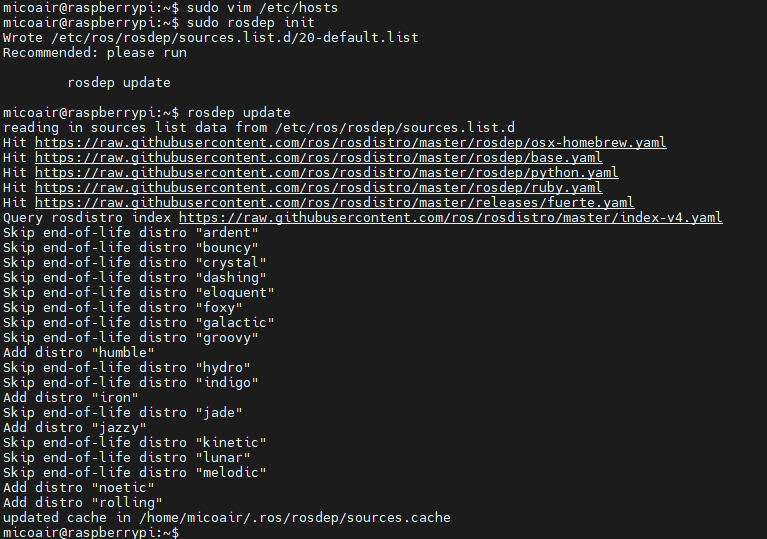
-
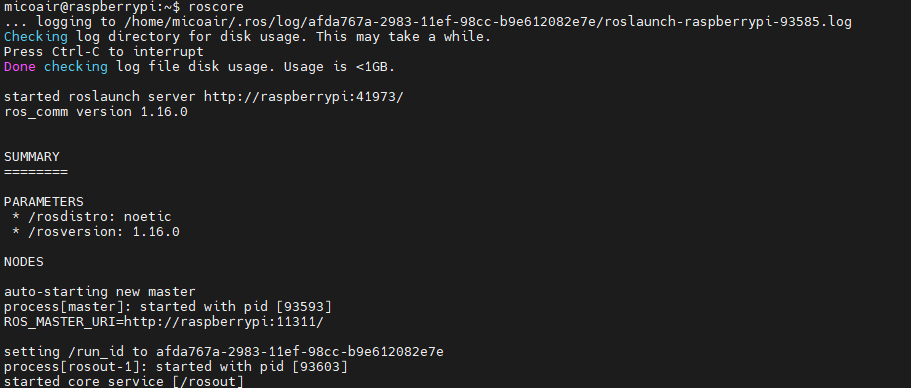
启动 ros 验证是否成功安装
roscore显示以下信息则说明成功安装
5. 安装 Realsense-ros
官方安装文档:https://github.com/IntelRealSense/realsense-ros/blob/ros1-legacy/README.md
参考官方安装文档,采用 Method 2: The RealSense distribution,需要先安装好上文步骤 3. 中的 librealsense SDK 及步骤 4. 中的 ROS
-
创建 catkin 工作环境
mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src/ -
下载 Intel RealSense ROS 源代码并切换分支
git clone https://github.com/IntelRealSense/realsense-ros.git git clone https://github.com/pal-robotics/ddynamic_reconfigure cd realsense-ros/ git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1` cd .. -
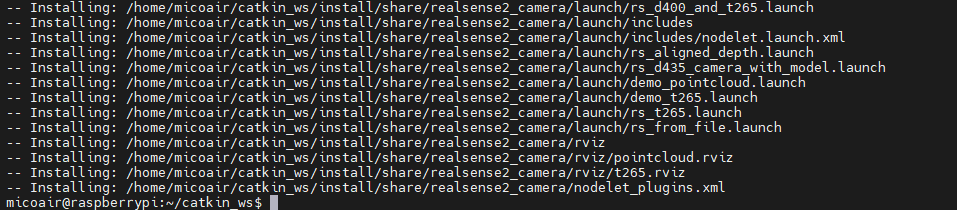
编译并安装
catkin_init_workspace cd .. catkin_make clean catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release catkin_make install
-
配置环境变量
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc
6. 安装 Mavros
官方安装文档:https://github.com/mavlink/mavros/tree/master/mavros#installation
参考官方安装文档,官方提供了预编译文件,可使用二进制安装,需要先安装好上文步骤 4. 中的 ROS
-
下载脚本并通过脚本安装
cd ~ sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh sudo chmod a+x install_geographiclib_datasets.sh sudo bash ./install_geographiclib_datasets.sh若
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh指令提示连接不上 githubusercontent,参考上文步骤 4. 中安装 ROS rosdep 的解决方法;安装过程没有详细日志输出且耗时不稳定,若长时间没有进展,尝试结束进程并重新执行
sudo bash ./install_geographiclib_datasets.sh
-
修改连接波特率
-
Ardupilot 固件,修改 apm.launch
sudo vim /opt/ros/noetic/share/mavros/launch/apm.launch将文档中第五行波特率由 57600 改为 230400 (为保证飞控与树莓派通信带宽充足,推荐波特率为 115200 以上,根据实际使用需求确定,微空MVD35 飞行平台采用 230400 )

-
PX4 固件,修改 px4.launch
sudo vim /opt/ros/noetic/share/mavros/launch/px4.launch将文档中第五行波特率由 57600 改为 460800 (为保证飞控与树莓派通信带宽充足,推荐波特率为 115200 以上,根据实际使用需求确定,微空MVD35 飞行平台采用 460800 )

- 启动 mavros 连接飞控
-
Ardupilot 固件
roslaunch mavros apm.launch树莓派能接收到飞控状态信息,则连接成功
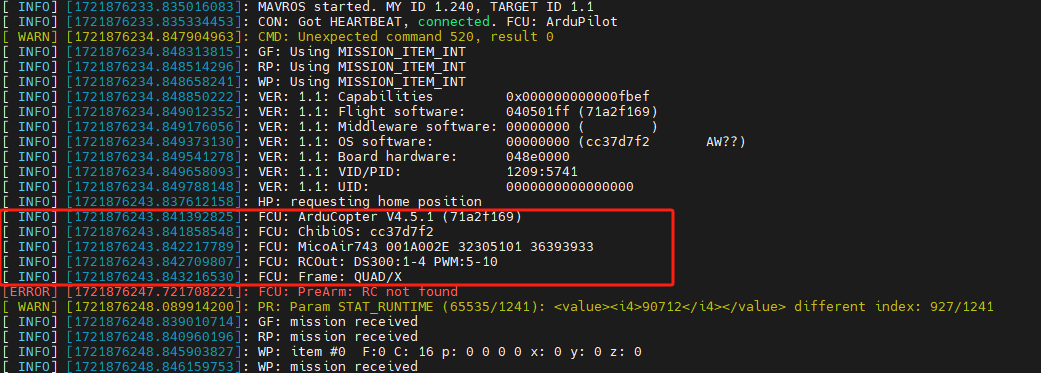
也可通过查看 mavros 连接状态,确定是否连接成功,在另一终端输入下面指令查看连接状态,回传飞控状态则连接成功
rostopic echo /mavros/state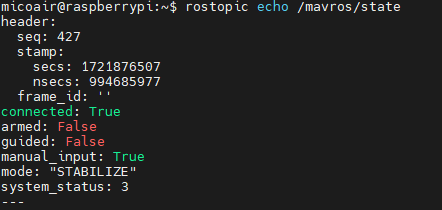
-
PX4 固件
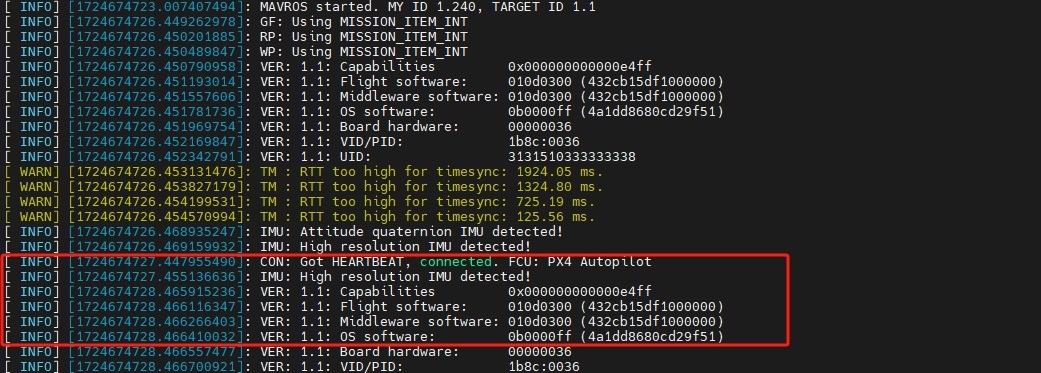
roslaunch mavros px4.launch树莓派能接收到飞控状态信息,则连接成功
也可通过查看 mavros 连接状态,确定是否连接成功,在另一终端输入下面指令查看连接状态,回传飞控状态则连接成功
rostopic echo /mavros/state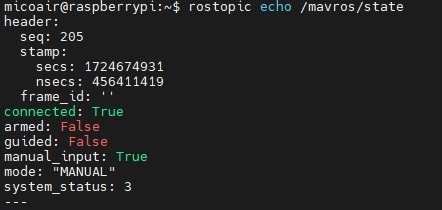
7. 配置 vision_to_mavros 坐标转化包
坐标系及 mavros 发布主题参考:https://github.com/thien94/vision_to_mavros
-
创建 catkin 工作环境
mkdir -p ~/vision_ws/src cd vision_ws/src -
下载坐标转化包源码
git clone https://github.com/thien94/vision_to_mavros.git -
编译工作环境
catkin_init_workspace cd .. catkin_make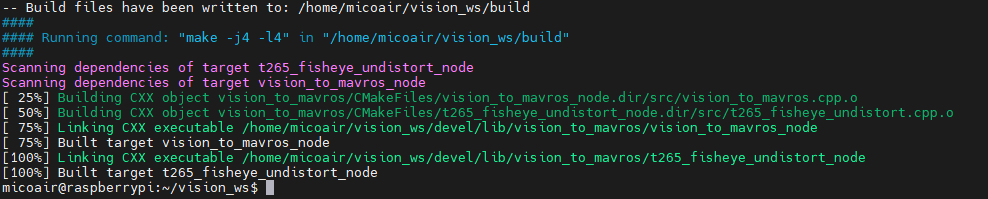
-
配置环境变量
echo "source ~/vision_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc
8. 安装 uhubctl (选装)
参考博客:https://blog.csdn.net/qq_51491920/article/details/123361881
T265 连接状态下树莓派开机会导致设备识别和数据读取异常,需要重新拔插 T265 以恢复正常,或通过安装 uhubctl (软件重启 USB 口)以解决 T265 需要硬件插拔的问题
微空MVD35 飞行平台已安装 uhubctl,且配置了开机自动初始化脚本,开机自动重启 USB 口,可直接使用 T265(见下文 方法三)
-
安装依赖库
sudo apt-get install libusb-1.0-0-dev -
下载源代码
cd ~ git clone https://github.com/mvp/uhubctl -
编译与安装
cd uhubctl make sudo make install
-
重启 USB
-
方法一:通过指令直接重启 USB 口
sudo uhubctl -l 2 -a cycle -p 1-4 -
方法二:设置启动终端时自动重启 USB ;打开多个终端时,只需重启 USB 一次
sudo vim /etc/profile在文档最后添加新行
sudo uhubctl -l 2 -a cycle -p 1-4保存并退出,重新连接终端时生效
-
方法三:通过开机自动化脚本重启 USB 口,开机即可直接使用 T265
sudo vim /etc/rc.local输入开机启动脚本
#!/bin/bash -e sleep 1 sudo uhubctl -l 2 -a cycle -p 1-4 exit 0保存并退出,重新启动树莓派生效
-
9. 安装 pymavlink (选装)
官方安装文档:https://github.com/ArduPilot/pymavlink
Pymavlink 通过 Python 语言实现 MAVLink 协议,可用于实现 python 脚本进行飞控通信控制等功能
MicoAir3.5'视觉版 飞行平台已安装 pymavlink,支持扩展 Python 应用
-
创建 python 软连接
sudo ln -s /usr/bin/python3 /usr/bin/python -
安装 python pip
sudo apt-get install -y python3-pip -
使用 pip 安装依赖库
sudo python -m pip install --upgrade future lxml
-
使用 pip 安装 pymavlink
sudo python -m pip install --upgrade pymavlink
10. 节点测试
在 MobaXterm 上打开四个终端,连接到树莓派,分别在四个终端中测试不同节点
-
T265 节点
roslaunch realsense2_camera rs_t265.launch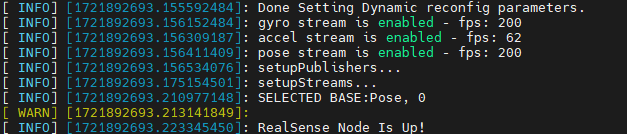
-
mavros 节点
-
Ardupilot 固件
roslaunch mavros apm.launch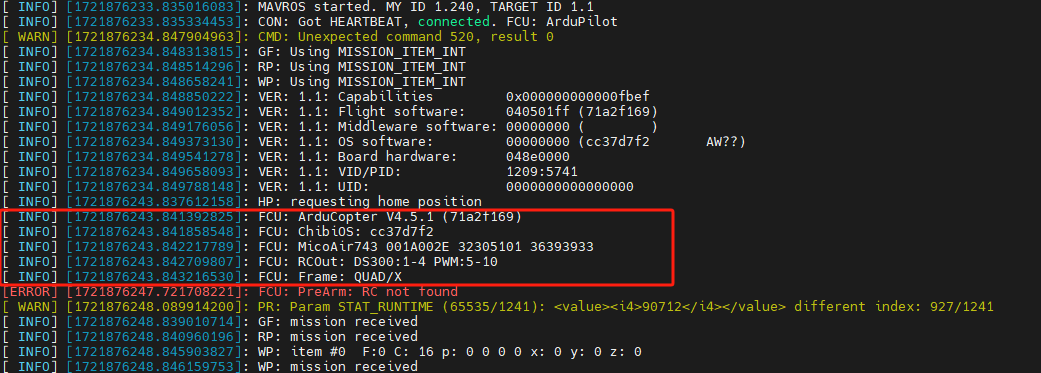
-
PX4 固件
roslaunch mavros px4.launch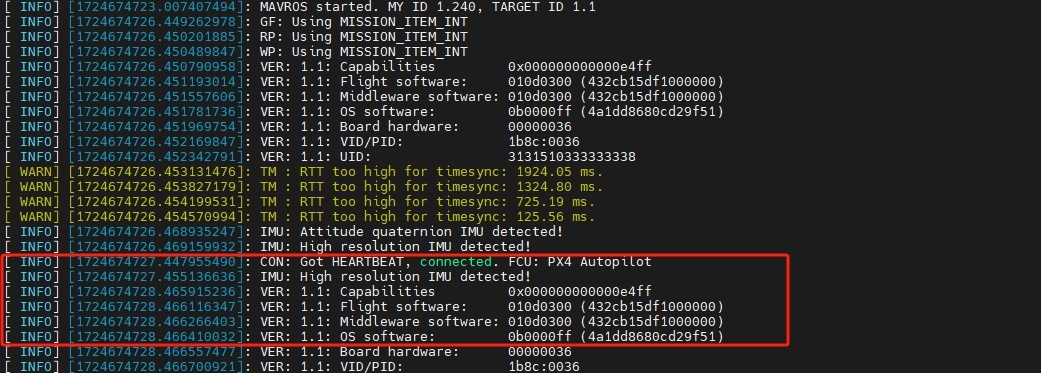
-
vision_to_mavros 节点
roslaunch vision_to_mavros t265_tf_to_mavros.launch
-
查看数据及状态
-
位置与方向数据
rostopic echo /mavros/vision_pose/pose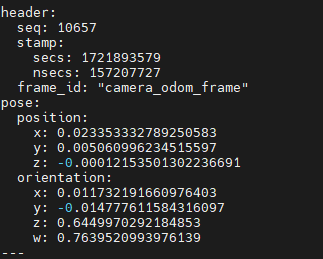
-
数据帧频率
rostopic hz /mavros/vision_pose/pose
-
飞控连接状态
rostopic echo /mavros/state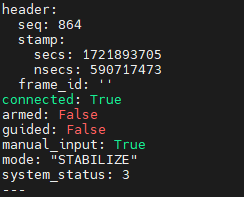
-
-
一次启动所有节点
-
Ardupilot 固件
-
t265_all_nodes.launch 脚本可同时启动 T265, mavros, vision_to_mavros 节点,默认启动 mavros 节点为 apm.launch
-
确认 t265_all_nodes.launch 脚本 mavros 节点为 apm.launch
vim vision_ws/src/vision_to_mavros/launch/t265_all_nodes.launch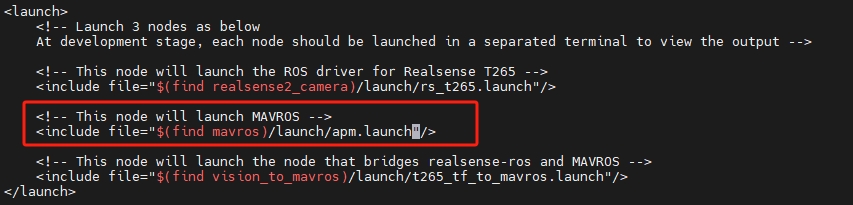
-
启动 t265_all_nodes.launch 脚本
roslaunch vision_to_mavros t265_all_nodes.launch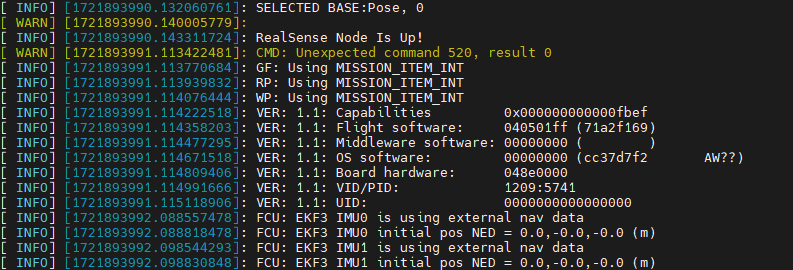
-
-
PX4 固件
-
t265_all_nodes.launch 脚本可同时启动 T265, mavros, vision_to_mavros 节点,默认启动 mavros 节点为 apm.launch
-
修改 t265_all_nodes.launch 脚本 mavros 节点为 px4.launch
vim vision_ws/src/vision_to_mavros/launch/t265_all_nodes.launch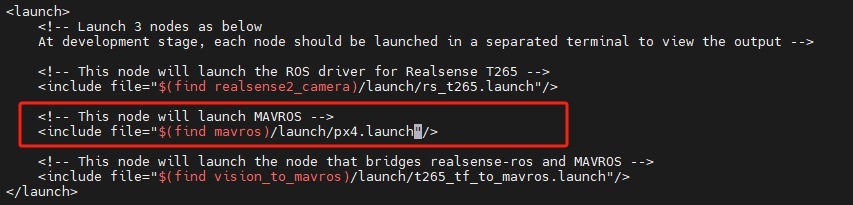
-
启动 t265_all_nodes.launch 脚本
roslaunch vision_to_mavros t265_all_nodes.launch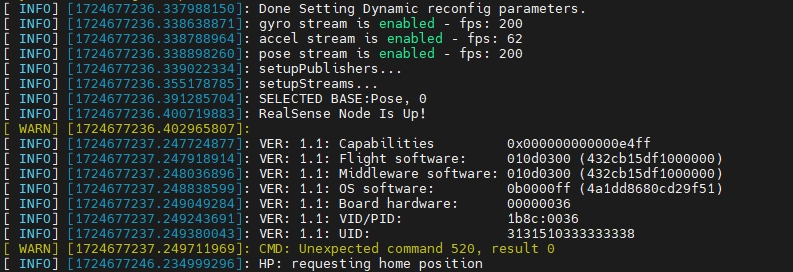
-
11. 姿态轨迹可视化
通过 rviz 机器人可视化工具,可以实时监测无人机飞行姿态与轨迹等
-
启动 T265,mavros,vision_to_mavros 节点
roslaunch vision_to_mavros t265_all_nodes.launch -
在 rviz 中查看姿态与轨迹
-
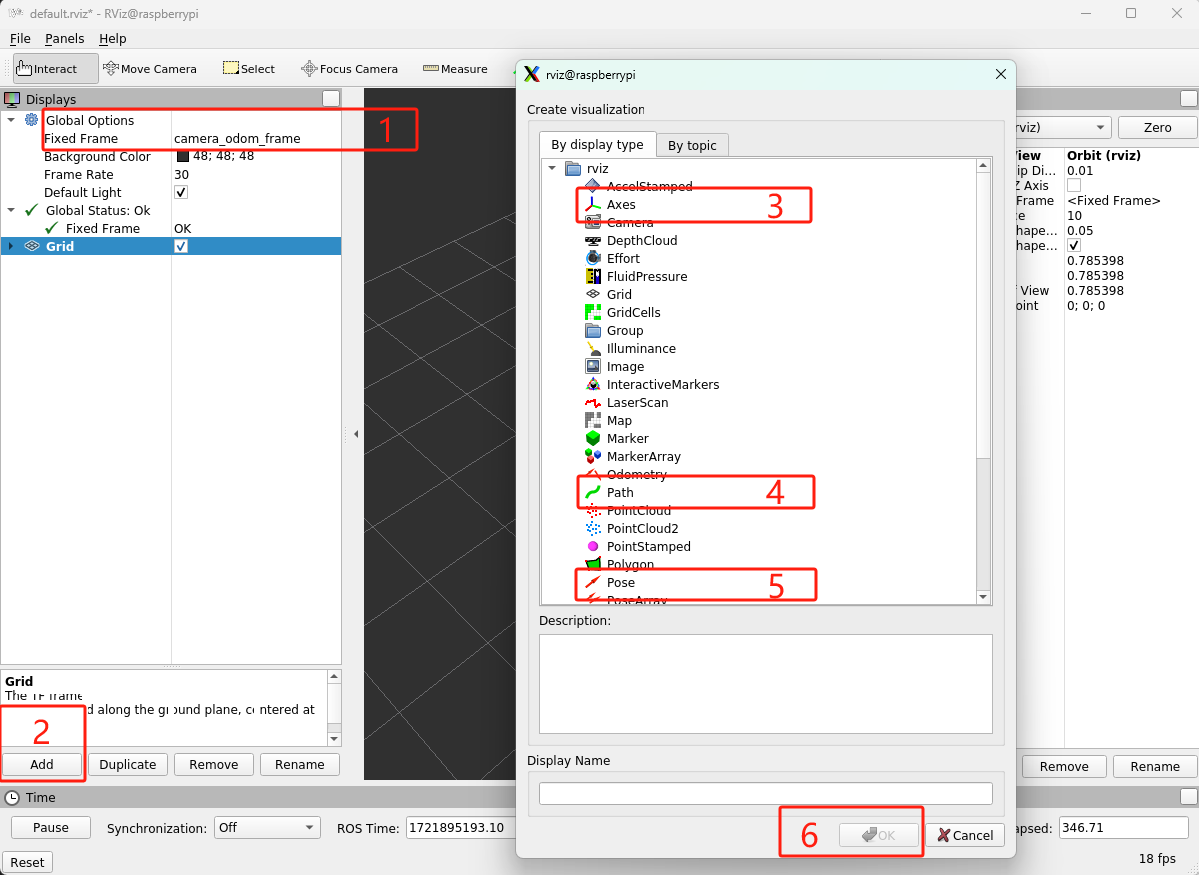
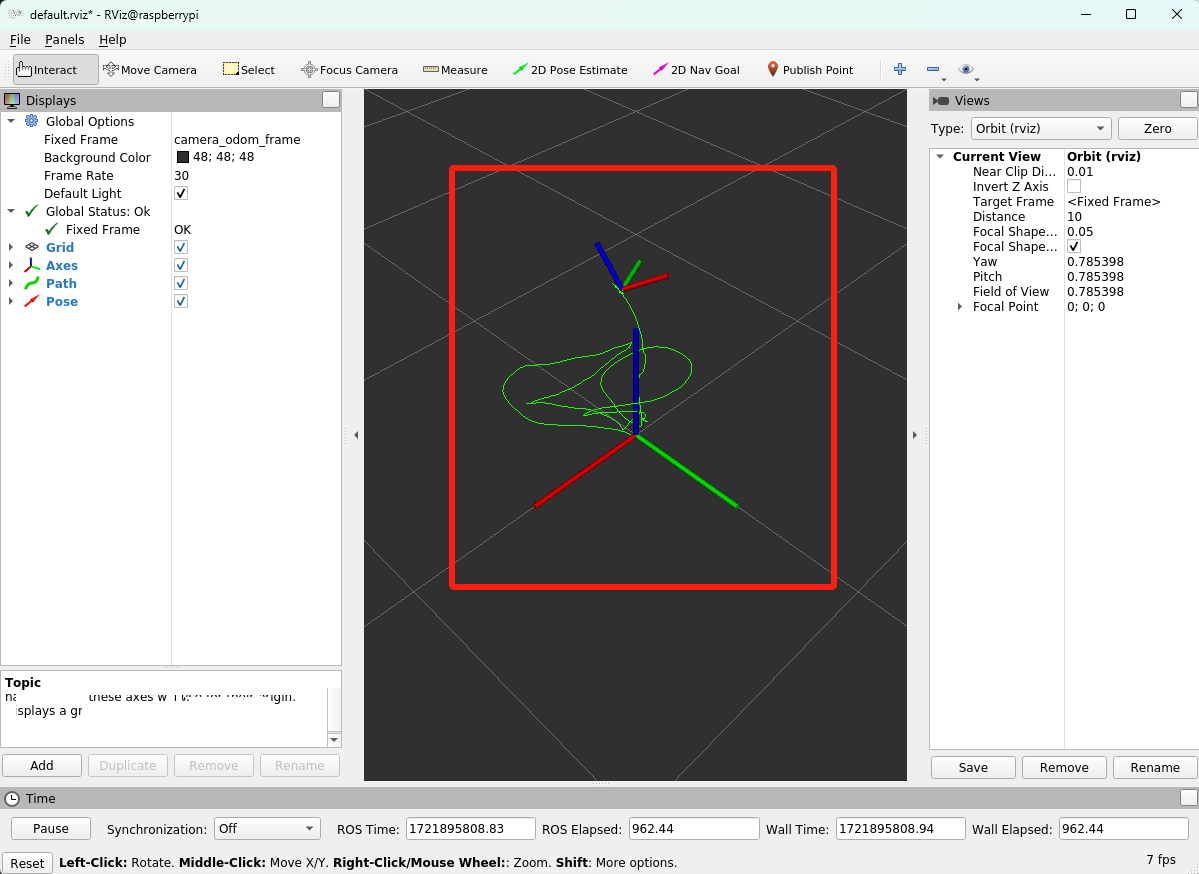
启动 rviz (此时 rviz 运行于树莓派上,并通过 SSH 连接将软件界面传回,并非运行于本地电脑,所以操作灵敏度不高)
rosrun rviz rviz -
将 Fixed Frame 设置为 camera_odom_frame,添加想要查看的数据,常见有 Axes Path Pose 等
-
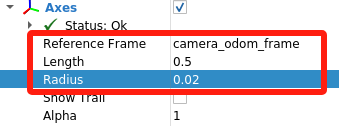
在添加的 Axes 中,将 Reference Frame 设置为 camera_odom_frame,Length 及 Radius 可根据空间场景设置大小
-
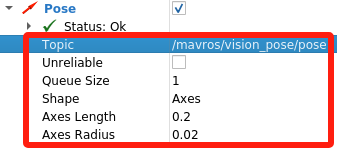
在添加的 Pose 中,将 Topic 设置为 /mavros/vision_pose/pose,Queue Size 设置为 1,Shape 设置为 Axes,Axes Length 及 Axes Radius 可根据机架大小设置
-
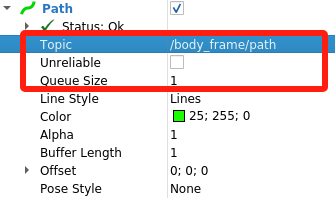
在添加的 Path 中,将 Topic 设置为 /body_frame/path,Queue Size 设置为 1
-
-
移动无人机或控制飞行过程中,rviz 将会实时显示无人机姿态和轨迹
树莓派4B+T265 机载电脑环境配置完成,后续内容请参考微空科技无人机视觉导航教程系列《镜像迁移使用篇》
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)