Ardupilot飞控固件常见问题
推荐使用MicoConfigurator 现代化ArduPilot配置工具
MicoConfigurator
无需安装,打开即用,支持多平台:Windows, Mac, Linux
- 实时数据仪表盘
- 图形化功能配置与传感器校准
- 全方位引导式设置,新手友好
- 固件更新一站式解决
- 现代化飞控文件管理,高速传输
- 实时数据波形图与日志分析

如何导出/加载/保存飞控参数
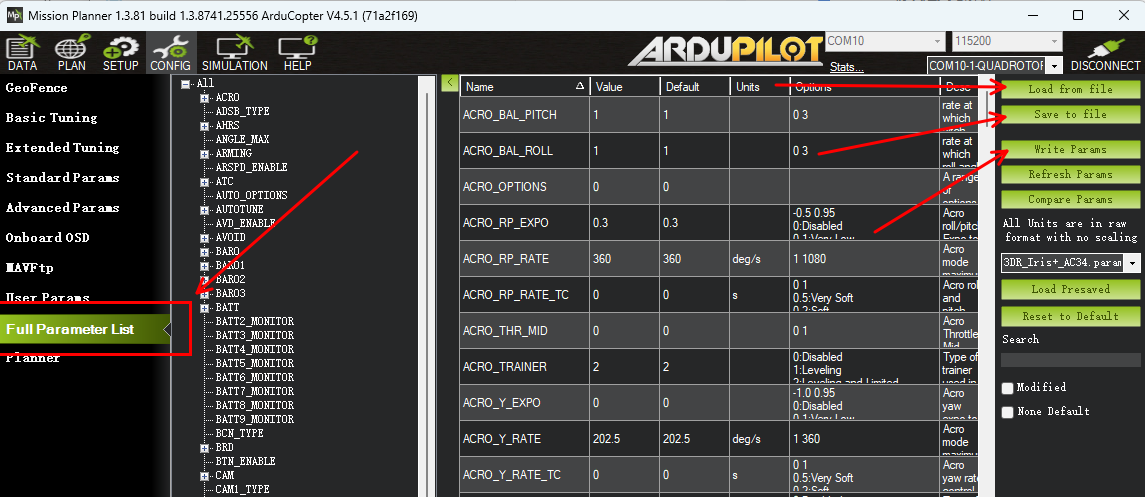
打开MissionPlanner地面站软件,切换到配置->全参数列表界面。
右侧按钮:
Save to flie: 可将当前飞控的参数导出并保存到电脑本地Load from file: 可将电脑本地的飞控参数文件导入到飞控Write Params: 当修改某个飞控参数后,点击该按钮将参数写入到飞控并保存
如何关闭解锁检查
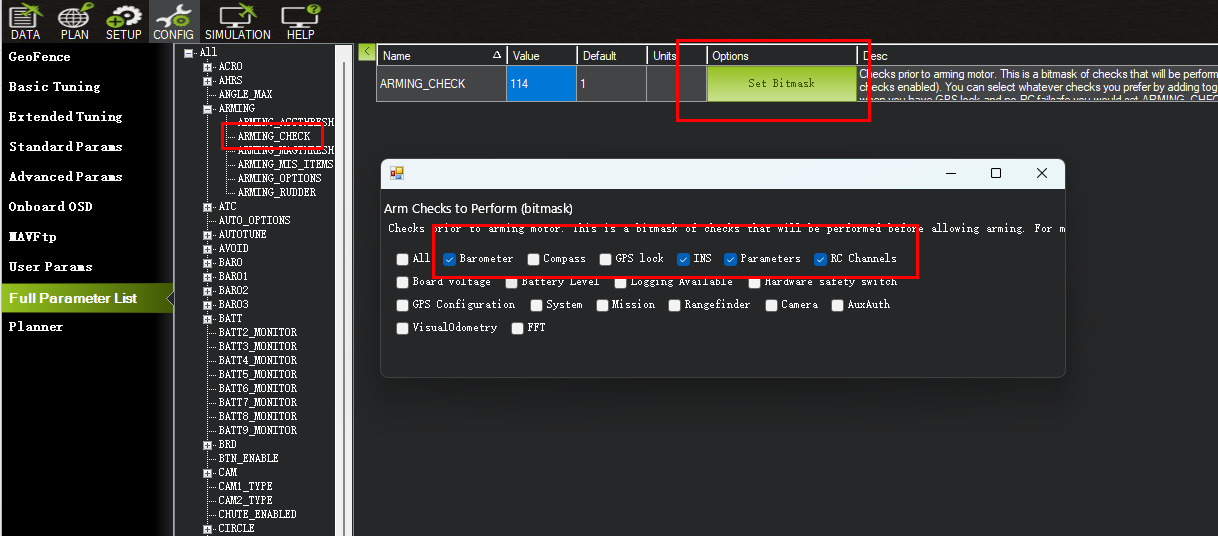
默认情况下Ardupilot固件会开启绝大部分解锁检查,这样会导致在许多情况下无法正常解锁飞控,可以适当关闭一些检查项。
在MP的全部参数列表中找到ARMING_CHECK参数,点击Set Bitmask进行设置。
通常建议只需要勾选几个必要检查,比如Barometer, INS等等。
飞控无法解锁
当通过遥控器或者地面站执行解锁操作或者命令时,飞控无法解锁。
此时地面站上的消息界面以及Hud界面上均会显示禁止解锁的消息提示:“PreArm:XXXXXX”,如下图所示:
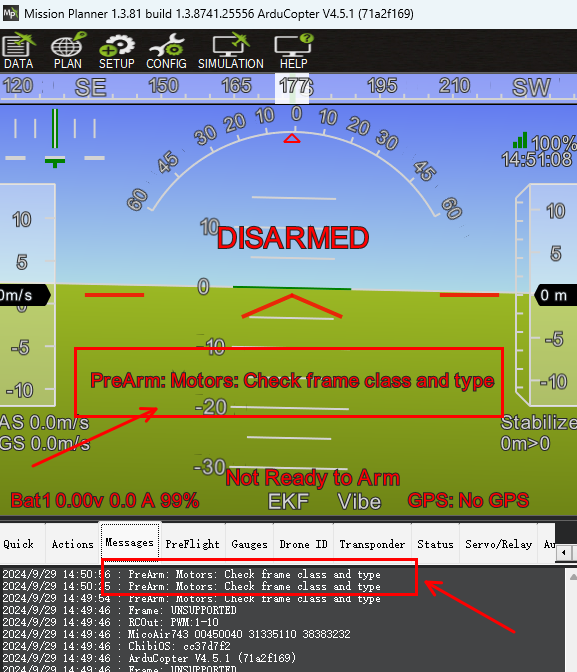
如果没有看到此消息,那么说明并没有解锁指令下达给飞控,请先检查遥控器操作是否正确。
常见的禁止解锁消息提示及其原因和对应解决方案:
-
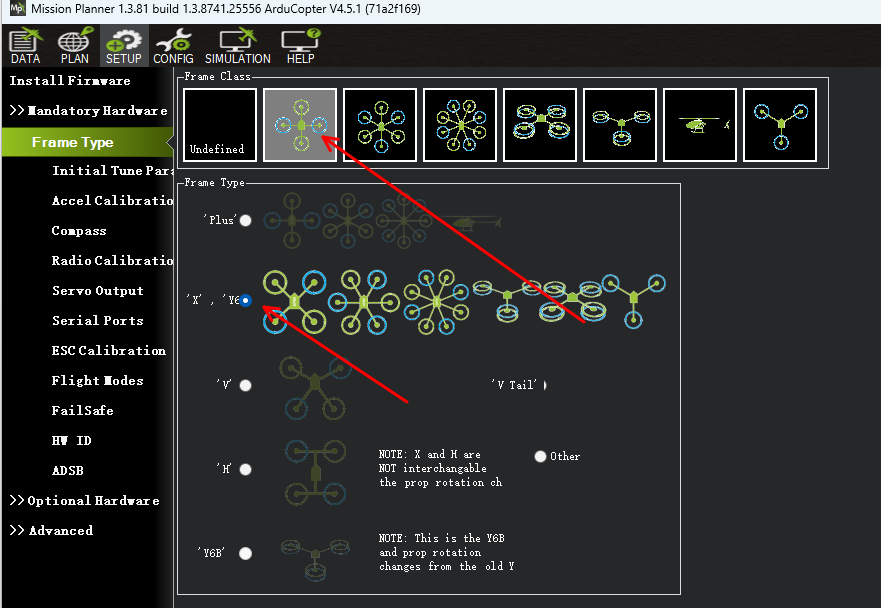
PreArm: Motors: Check frame class and type
原因:未设置机架类型
解决方案: 在MP的设置界面上设置机架类型参数
-
PreArm: GPS1: Bad fix
原因:当未关闭GPS信号检查,且又在GPS未定位或者不存在的情况下尝试解锁。
解决方案: 1. 在室外空旷地搜星完毕,再尝试解锁; 2. 关闭GPS信号的解锁检查 -
PreArm: Need Position Estimate
原因:这因为在定点模式下(如Loiter、PosHold)执行解锁操作,但此时飞控不存在正确的传感器数据来源,如GPS未完成定位,EKF设置了数据源但不存在该传感器,又或者未设置正确的数据源等等。具体的原因可能会很多,需要仔细分析。
解决方案:如果飞控接入了微空光流如MTF-01,在定点模式下起飞出现此报错,先检查飞控是否已经读到传感器数据,其次EK3_SRC参数已经正确设置。如果按照微空的教程设置了EKF数据源切换功能,请检查当前已经切换到了光流数据源(MP地面站消息界面会有消息提示)。 -
PreArm: AHRS: EK3 sources require GPS
原因:当EK3数据源设置了使用GPS(通常是默认值),又在没接入GPS时尝试解锁,会出现该提示。
解决方案: 1. 正确接入GPS; 2. 如果确定无GPS接入,又需要在定点模式下解锁(比如使用光流等传感器),那么要修改EK3_SRC参数,取消使用GPS作为EK3数据源。
飞控已解锁但电机没有反应/不转
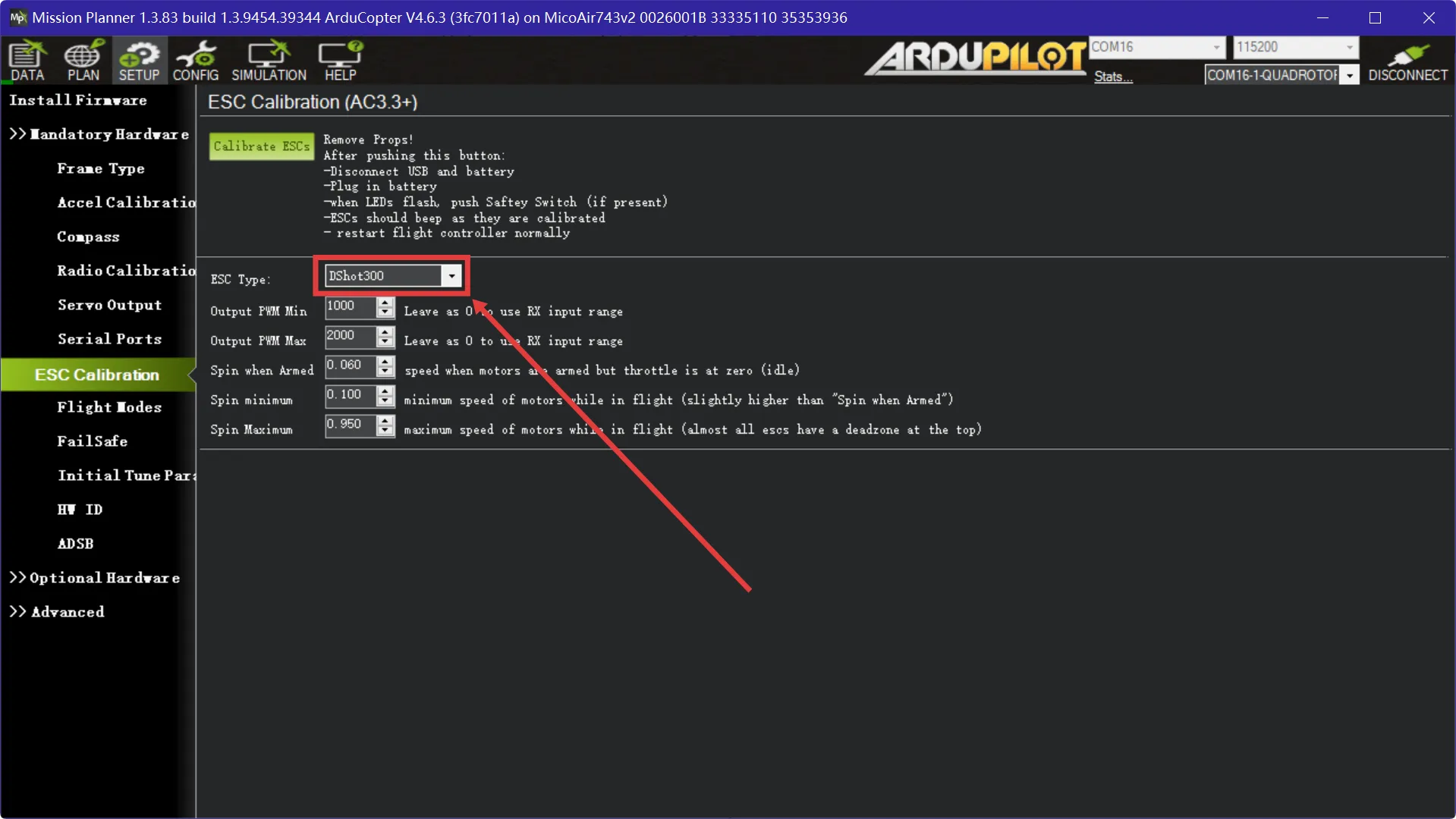
这通常是由于电调不识别飞控输出的信号类型所导致。
如果使用了蓝鸟电调,请先将飞控电调信号类型设置为Dshot300,如下图所示:
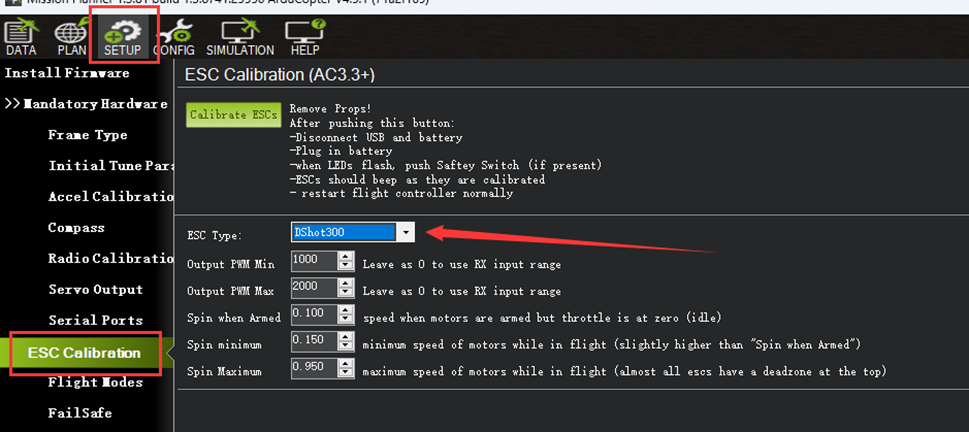
如果使用的是一些传统电调,由于此类电调通常只能识别PWM信号,请检查飞控电调信号类型是否已经设置成了Standard(PWM)。
如何设置DJI天空端OSD(O3/vista/O4)
OSD_TYPE = 5
Serialn_Baud = 115200
Serialn_Protocol = 42 (MSP_DisplayPort)
MSP_OPTIONS = 4 (Enable_BTFLFonts)
n取决与DJI天空端接到哪一路串口上,比如MicoAir743飞控的天空端接口是Serial2,因此这里需要配置Serial2的参数。
Ardupilot开启双向DShot功能
双向DShot功能默认是不开启的,开启后主要可以让飞控实时获取当前电调转速值,以实现RPM滤波功能。
另外双向DShot功能同时需要电调支持,BL32/AM32/Bluejay电调固件可以支持,BLS以及各类闭源电调基本都不支持。
-
首先确认当前电调协议设置为DShot300/600,推荐是DShot300,搜索
MOT_PWM_TYPE参数并设置为DShot300。 -
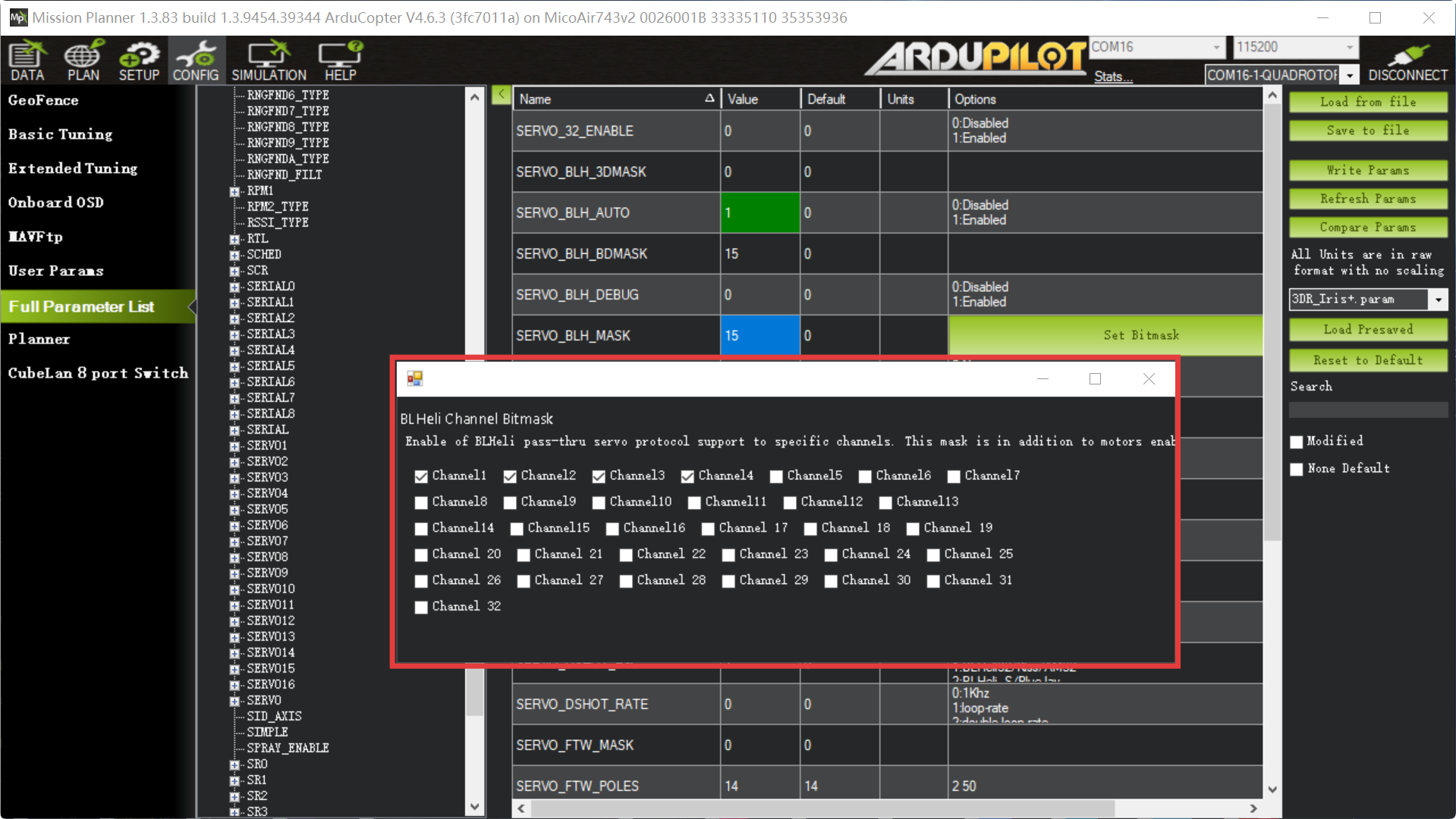
找到
SERVO_BLH_BDMASK参数,并选择使能通道,通常是1-4,微空743飞控1-8通道均可支持双向DShot功能。
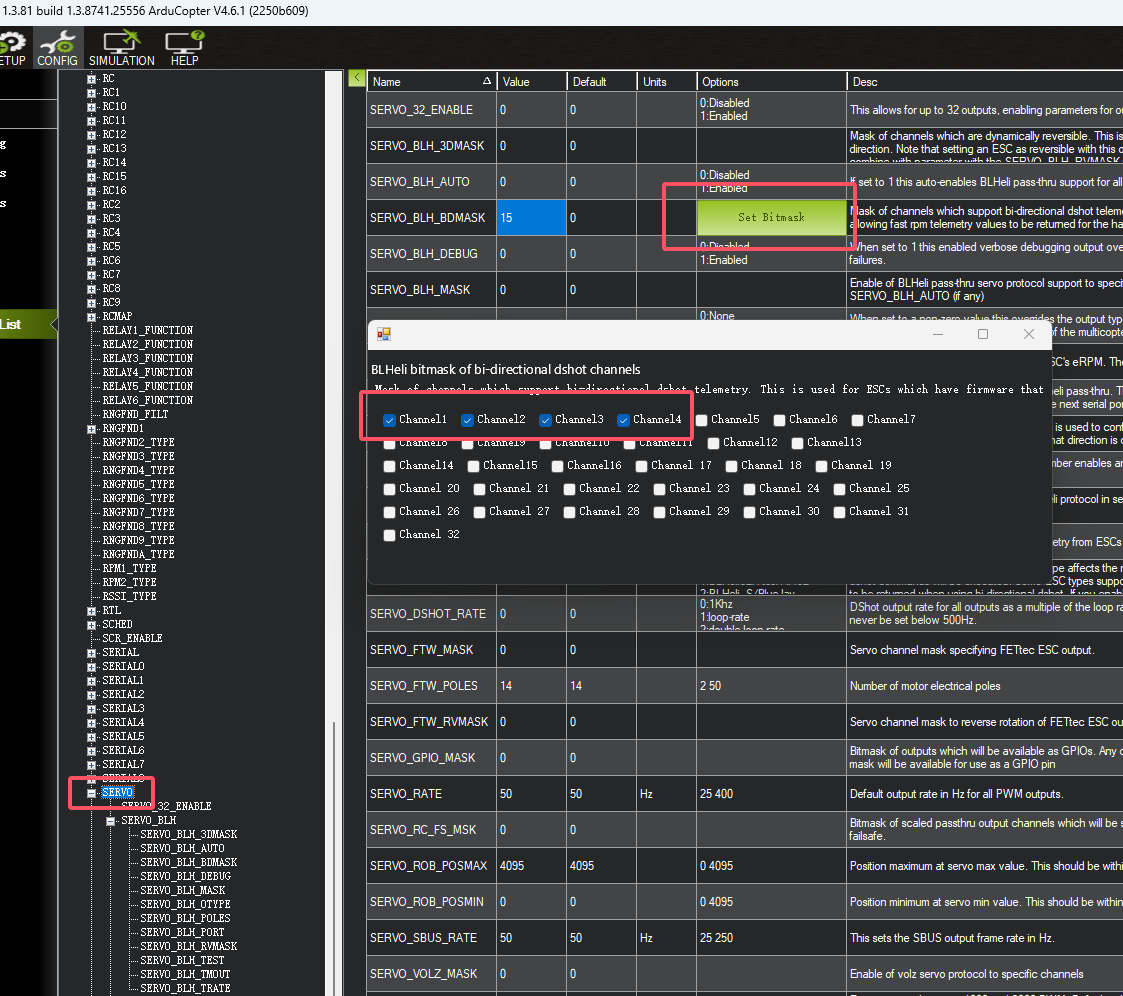
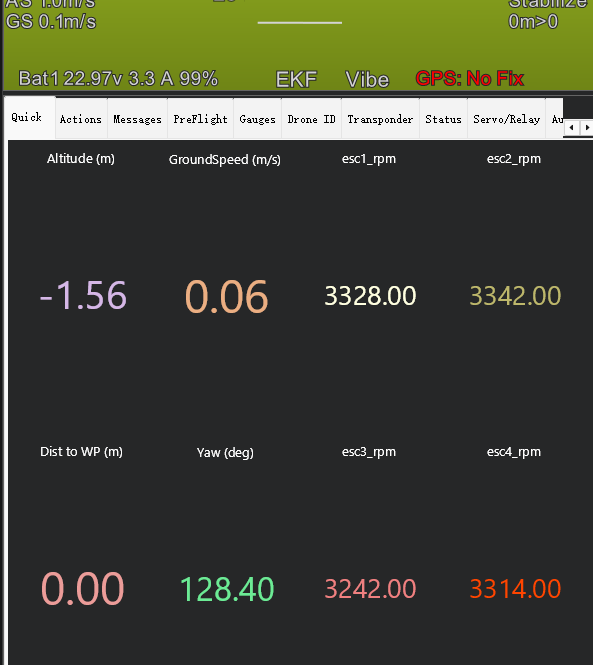
- 飞机或者飞控重新上电,此时解锁并轻推油门,MP地面站上可以观察电调实时输出的转速值。
Ardupilot使用Lua脚本自定义控制RGB灯带
视频教程: https://www.bilibili.com/video/BV1mz4tzCEaW
Ardupilot开启串口透传功能(Serial Passthrough)
Ardupilot串口透传的官方介绍:https://ardupilot.org/copter/docs/common-serial-passthrough.html#serial-passthrough
飞控会对串口的数据进行协议解析,而当开启串口透传功能后,消息数据会直接通过串口转发而不做任何解析。即串口设备可通过飞控作为桥接,实现电脑上位机对GPS,光流,测距仪等外设进行直接调试,此处以Ardupilot固件(Copter4.6.3)的飞控开启串口透传连接光流测距模块为例。
-
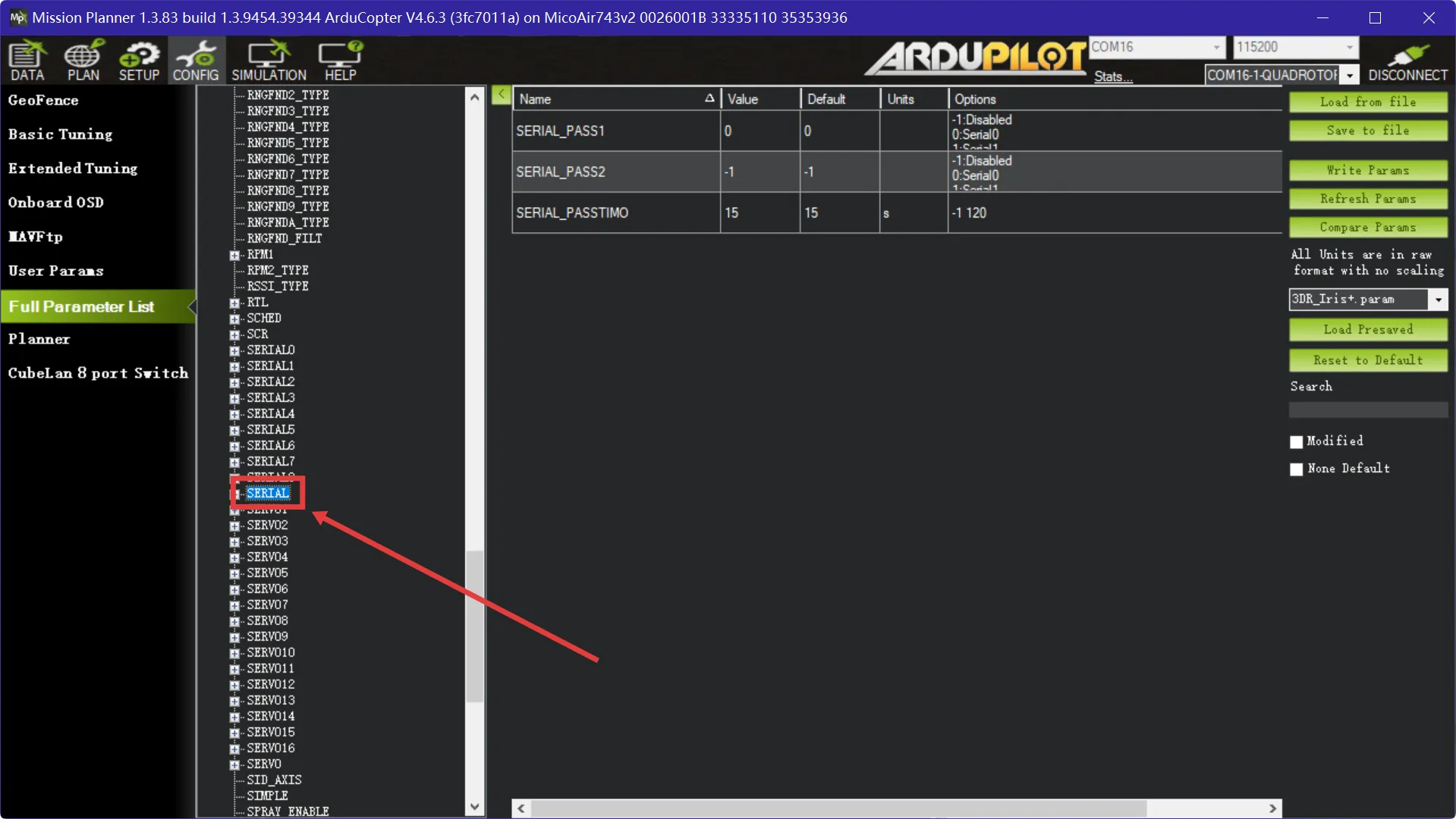
在飞控通过USB线连接Mission Planner后,选择 CONFIG → Full Parameter List
-
在参数表里找到并点击 SERIAL 一项
-
SERIAL_PASS2 的参数值即为外设实际上连接的串口号
-
修改 SERIAL_PASS2 的参数值为4(此处飞控为MicoAir743v2-AIO-45A,Serial4连接的外设为MTF-02光流测距一体传感器)
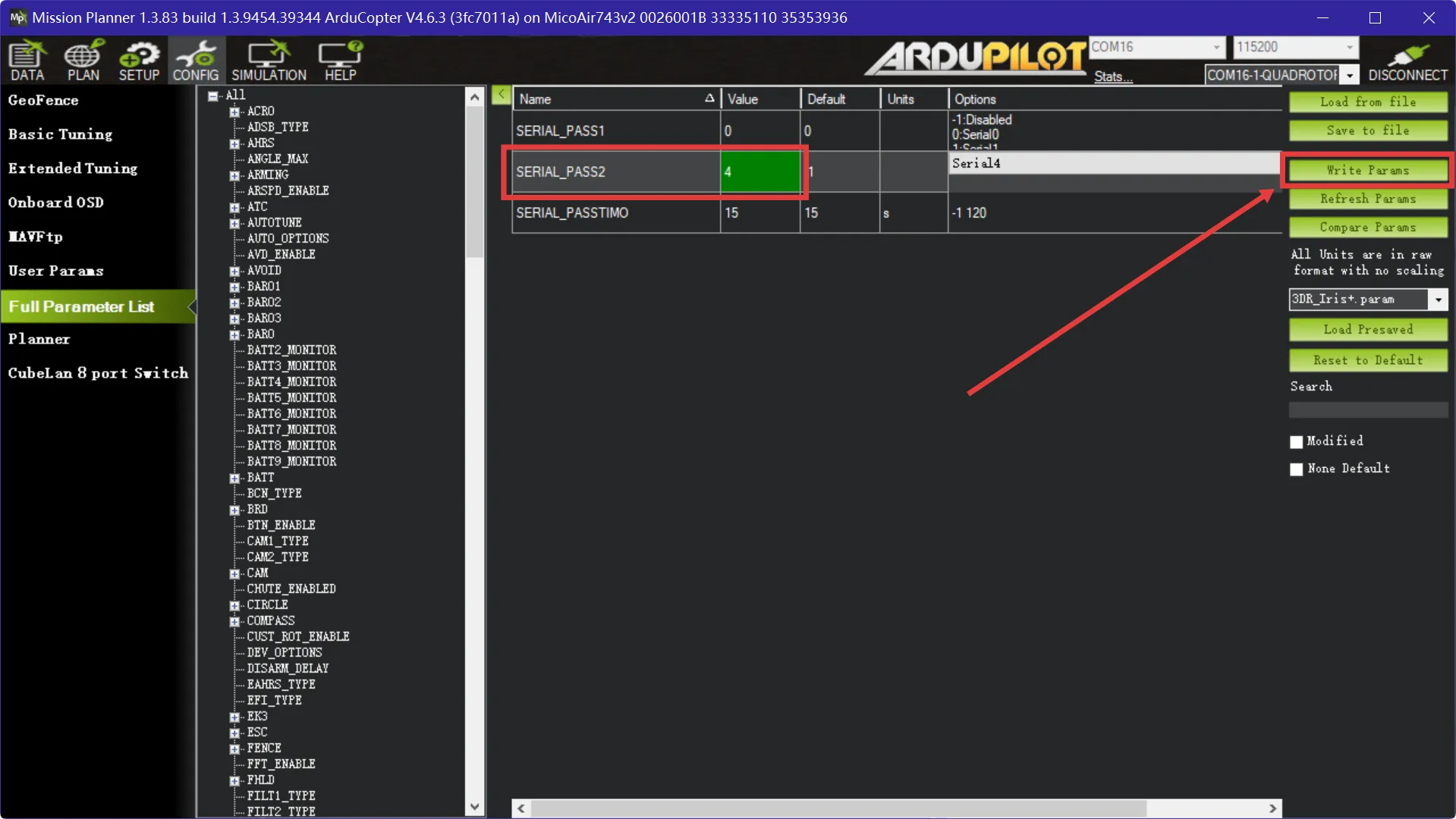
-
点击 Write Parames 写入参数后,再点击右上角的 DISCONNECT 断开连接(注意不可以断开飞控和电脑的接线)
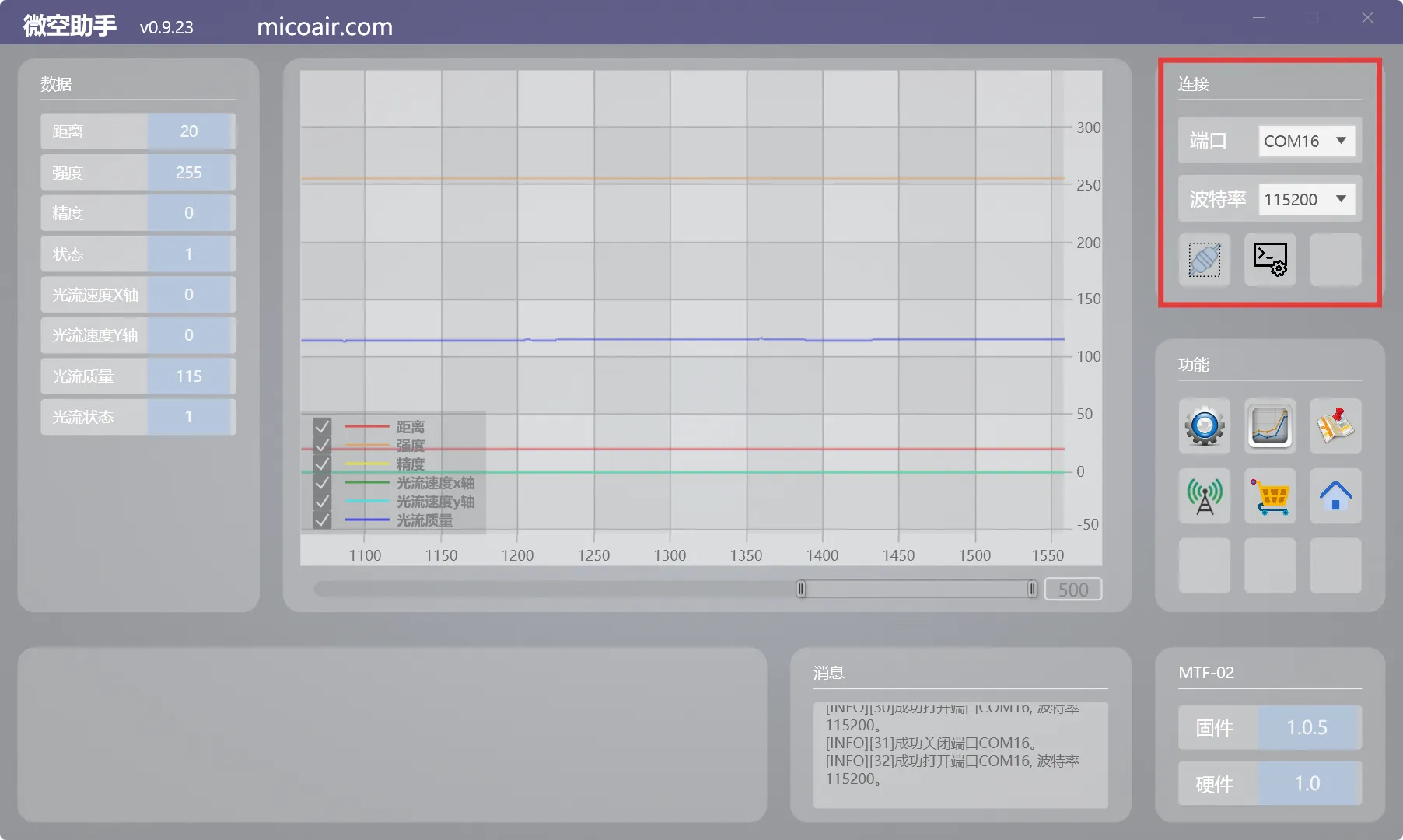
-
打开微空助手,找到Ardupilot的COM端口号(此处Windows给飞控分配的端口号为COM16),设置好波特率后点击连接,MTF-02光流测距传感器识别完成,串口透传成功
Ardupilot开启电调桥接功能
Ardupilot电调桥接的官方介绍:https://ardupilot.org/copter/docs/common-blheli32-passthru.html
电调桥接功能允许在电调保持与飞控连接的情况下,使用运行在电脑上的相应BLS/AM32等配置器,对 BLS/AM32/BlueJay等电调进行配置和操作,此处以Ardupilot固件(Copter4.6.3)的飞控开启电调桥接连接AM32电调的Web配置器为例。
-
在飞控通过USB线连接Mission Planner后,选择 CONFIG → Full Parameter List
-
在参数表里找到并点击 SERVO 一项
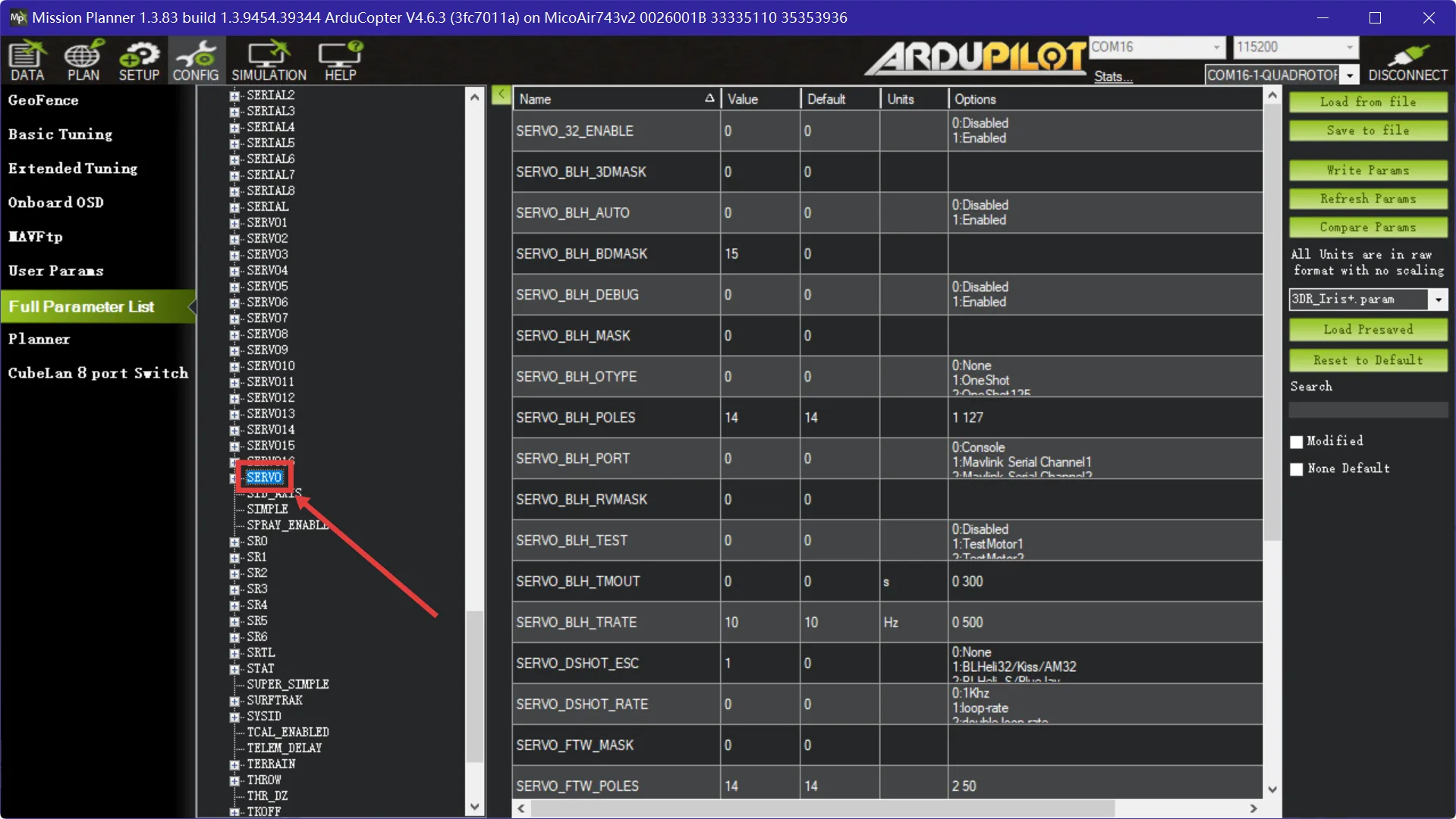
-
将 SERVO_BLH_AUTO 参数值设为1,将 SERVO_BLH_MASK 参数值设为15(此处机架类型为四旋翼,Channel1~4为四路电机输出),点击右侧 Write Params 写入参数
-
选择 SETUP → Mandatory Hardware → ESC Calibration
-
将电调协议设置为 Dshot300(注意:必须为Dshot协议)
-
重启飞控并关闭Mission Planner,使用电池给电调供电(微空AIO可不用电池供电,仅USB供电下就可以完成这一系列操作)。
-
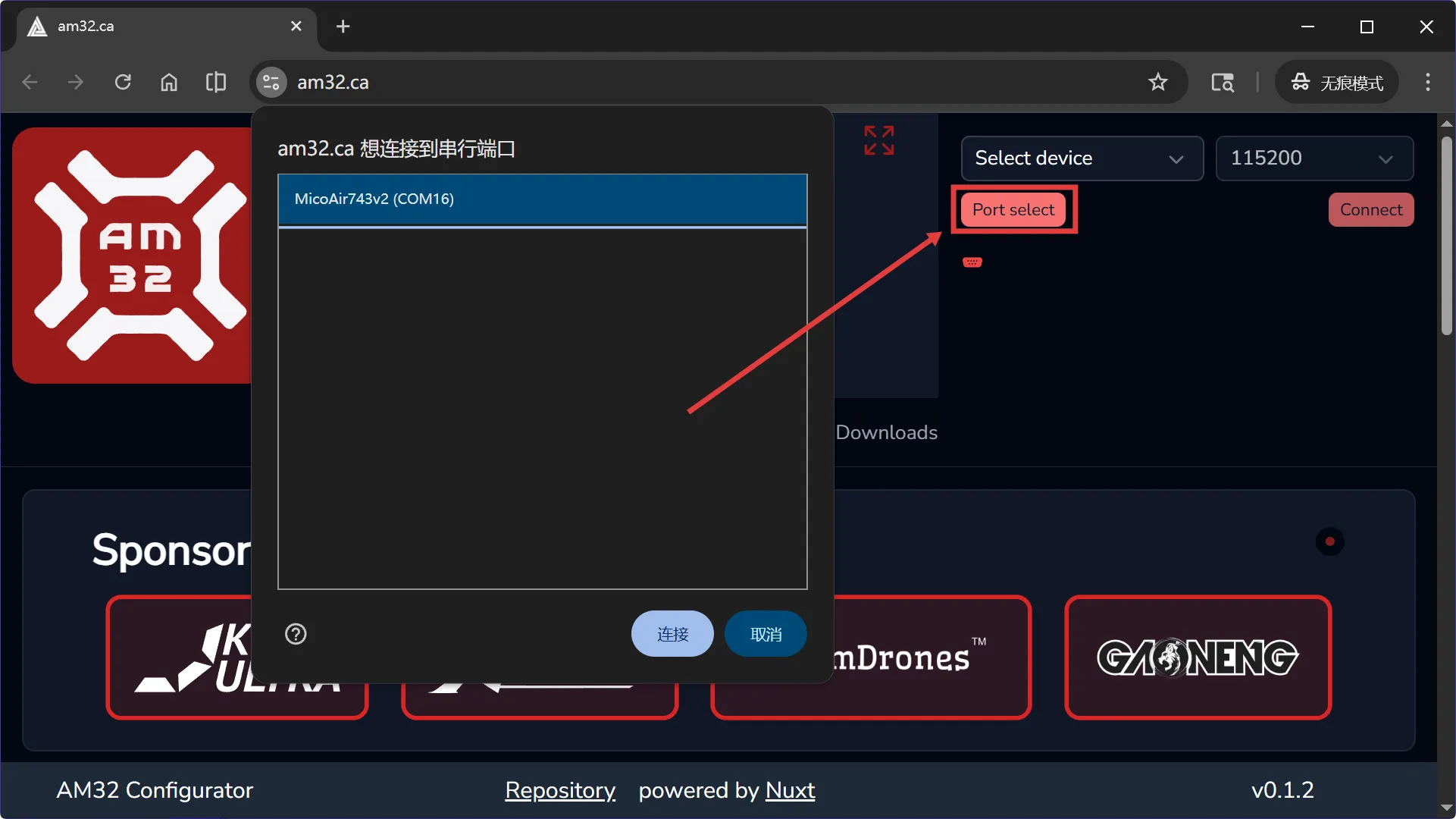
使用 USB-Type-C 口的线连接飞控,打开本地电调配置器,或Web电调配置器。(此处使用AM32的Web配置器)
-
点击Port select,在弹出的窗口中选择飞控的端口号(此处飞控的端口号为COM16)
-
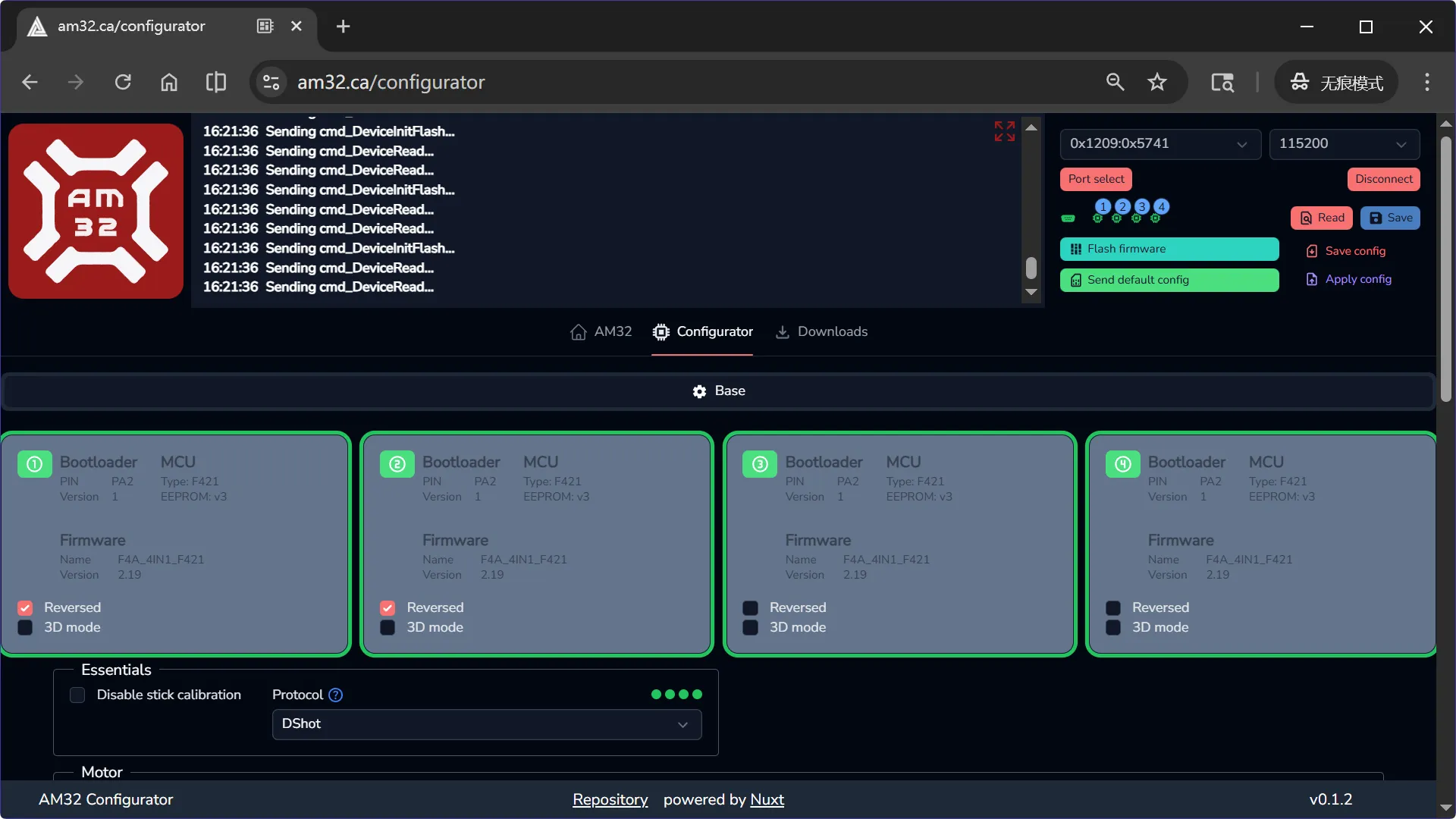
选择好端口后点击 CONNNECT,Web版配置器识别电调完成,桥接成功
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)