微空无人机视觉导航教程2-飞控基础设置(Ardupilot及PX4)
微空科技无人机视觉导航教程系列包含:
-
飞控基础设置(Ardupilot及PX4)
-
双目VIO算法实现与应用(树莓派5+D435i)
-
拓展应用案例
《飞控基础设置(Ardupilot及PX4)》以微空 MVD35 飞行平台为例,介绍开源飞控的基础设置和配置调试步骤,确保无人机的稳定飞行。MVD35 搭载微空MicoAir743飞控,官方支持 Ardupilot 及 PX4 固件,不同固件使用地面站不同,且具体设置过程差异较大,故本篇将分别进行介绍:前半部分介绍 Ardupilot 配置过程;后半部分介绍 PX4 配置过程。视觉导航相关设置及飞行测试,参考《视觉导航设置与飞行实践(Ardupilot及PX4)》。
MVD35 套件购买
Ardupilot 基础飞行设置
0. 准备内容
-
硬件准备
-
微空MVD35 飞行平台,MicoAir743飞控,烧录Ardupilot固件
-
遥控器(加装微空科技 TRS 遥数一体高频头)
-
USB A - C 数据线,USB 延长线
-
-
软件准备
- Mission Planner,官方下载链接:https://firmware.ardupilot.org/Tools/MissionPlanner/MissionPlanner-latest.msi
-
使用技巧
- 重启无人机:方法一:硬件重启——飞控断电后重新上电;方法二:软件重启—— Mission Planner -> 初始设置 -> >> 必要硬件 -> 指南针 -> Reboot
1. 设置数传连接
微空MVD35 飞行平台配备了 微空 2.4G TRS 遥数一体链路,支持飞控数据远距离高速无线传输,为后续的设置和调试过程提供极大的便利,所以首先进行数传部分的设置。注意在视觉导航模式下因可能需要传输部分视觉传感器的数据,数据量较大,因此需要先将高频头设置为高速模式,该模式下高频头和接收机波特率均为115200,透传速率为8K Byte/s。
-
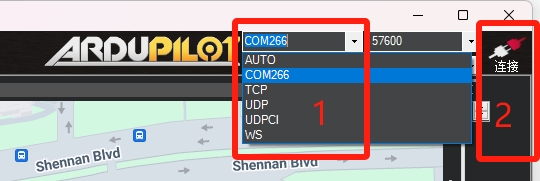
连接 Mission Planner (有线)
-
将树莓派上连接飞控的 USB 头拔出,接入 USB 延长线连接到电脑
-
Mission Planner -> 右上角选择飞控端口 -> 连接
-
-
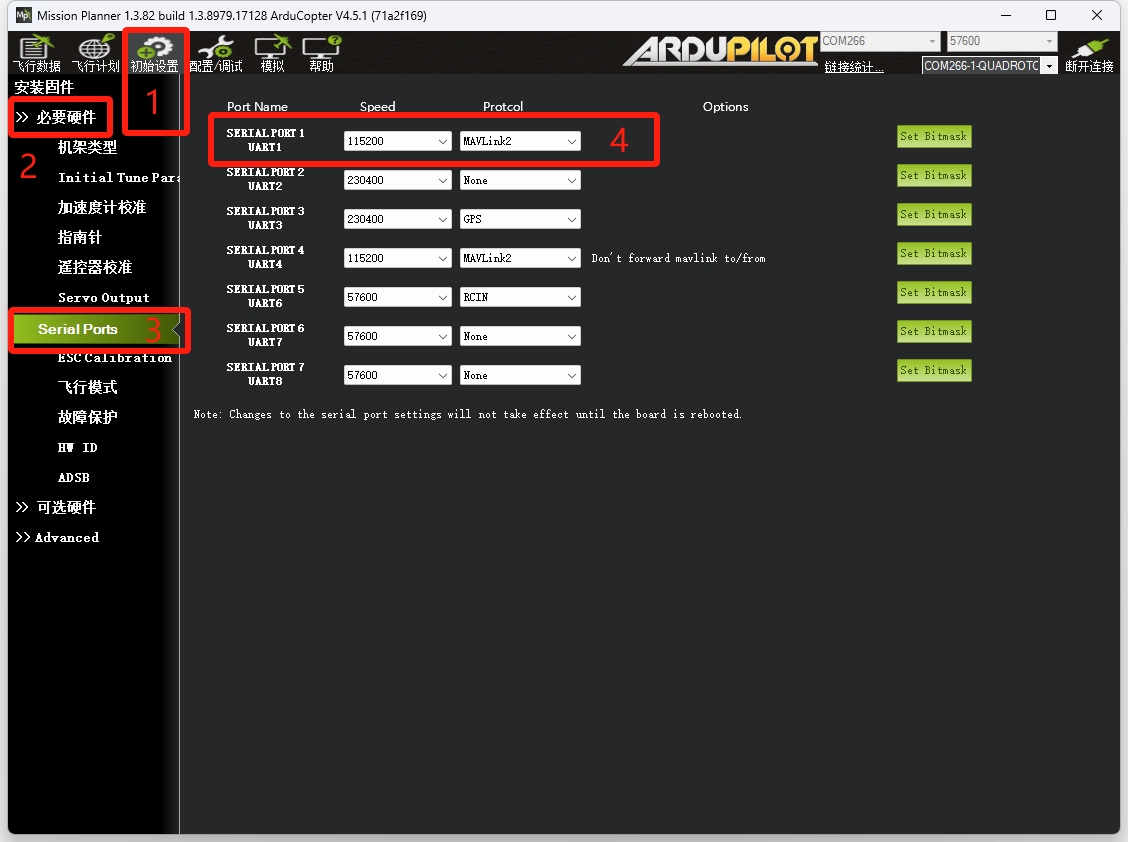
设置数传串口
-
Mission Planner -> 初始设置 -> >> 必要硬件 -> Serial Ports -> SERIAL PORT 1 / UART1
-
Speed 设置为 115200;Protocol 保持默认 MAVLink2
-
-
重启生效
-
连接 Mission Planner (无线)
-
将飞控 USB 头重新插回树莓派
-
插上电池,启动无人机
-
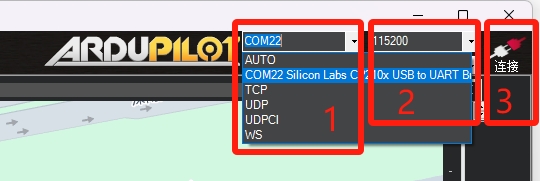
打开遥控器,使用 USB A - C 数据线连接遥控器上 TRS 高频头与电脑
-
Mission Planner -> 右上角选择 TRS 高频头端口 -> 波特率选择 115200 -> 连接
-
2. 设置机架类型
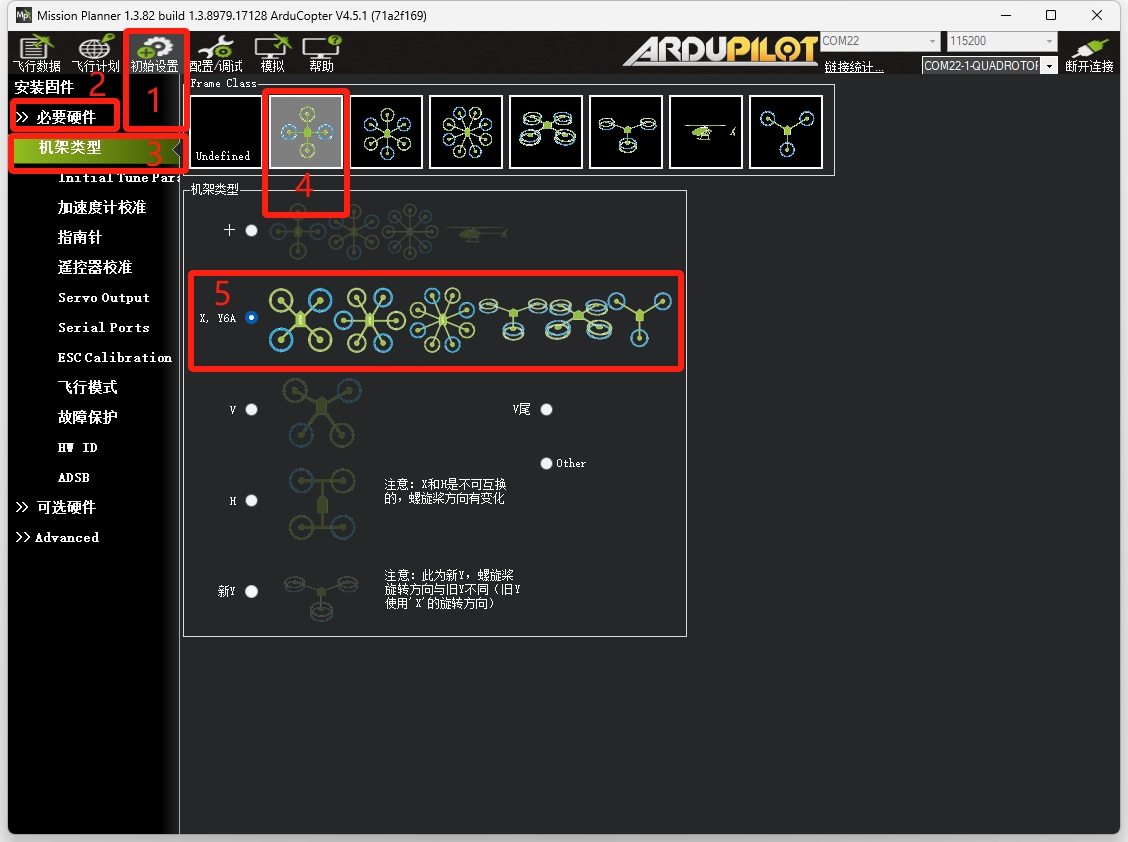
Ardupilot 支持众多的机架类型,不同机架类型对应的硬件设置不同,需根据实际情况选择对应机架类型;MicoAir743 飞控首次使用时需要设置机架类型,默认为未定义;MVD35 飞行平台采用的是最常见的机架类型: 四旋翼 X 型。
-
设置机架类型
- Mission Planner -> 初始设置 -> >> 必要硬件 -> 机架类型 -> 四旋翼 -> X, Y6A
-
重启生效
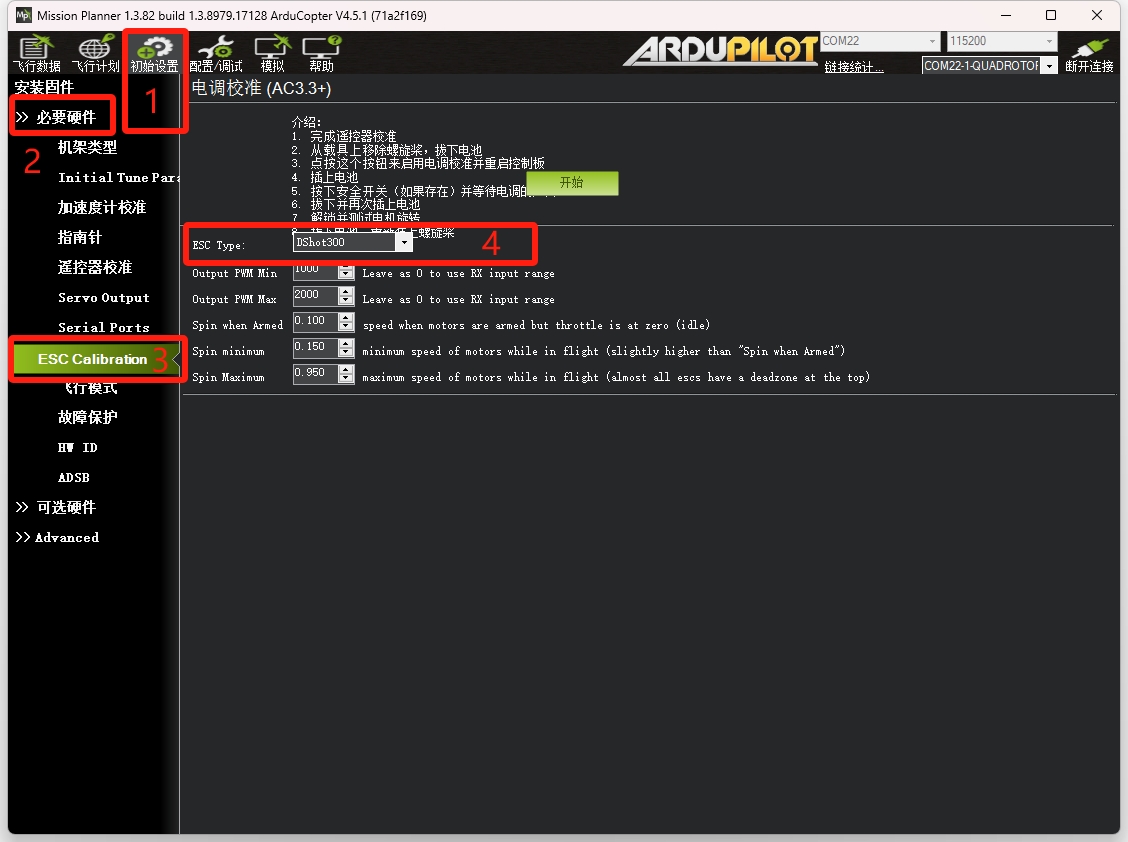
3. 设置电调协议
Ardupilot 支持多种电调通信协议,如 PWM(默认)、OneShot、DShot 等;微空MVD35 使用 DShot 协议且支持双向 DShot 转速回传;DShot 为数字协议信号,可以精确传递控制指令,无需进行电调信号校准。
-
设置电调协议
- Mission Planner -> 初始设置 -> >> 必要硬件 -> ESC Calibration -> ESC Type 选择 DShot300
-
重启生效
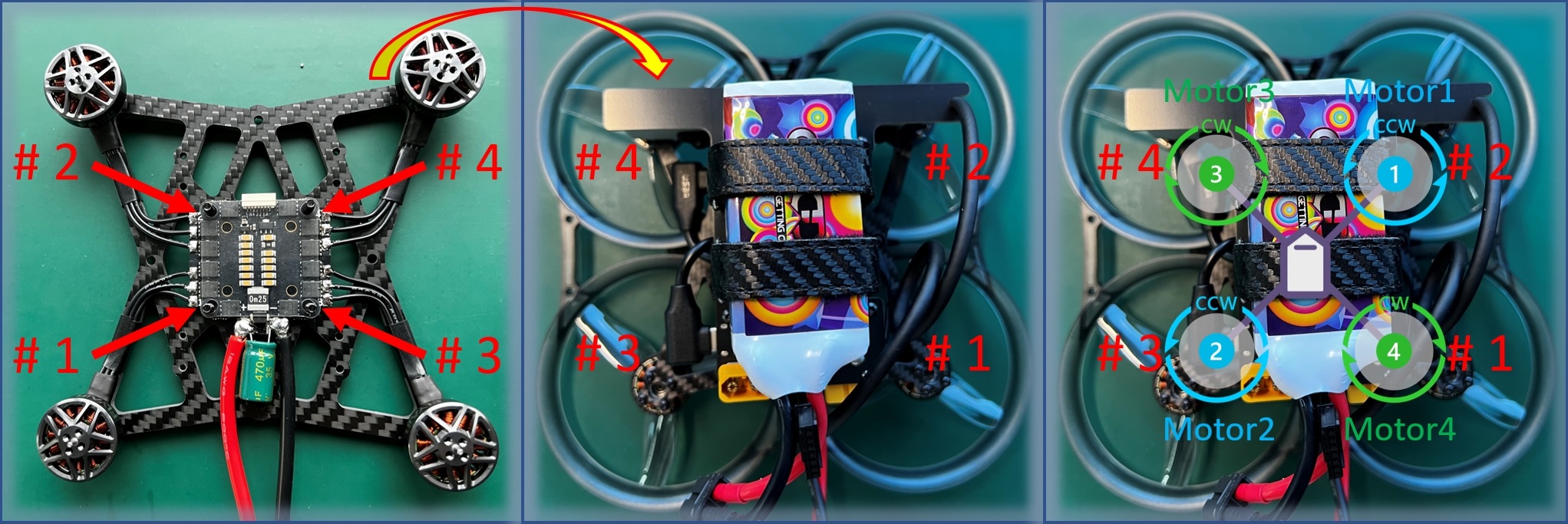
4. 设置电机顺序
Ardupilot 严格指定了不同机架类型输出信号通道与实际电机转向和位置的对应关系,需要根据具体机架类型和电调的输出序号,确定电机的对应关系。详细介绍可参考 Ardupilot 官方说明文档:https://ardupilot.org/copter/docs/connect-escs-and-motors.html
-
确定电机对应关系
-
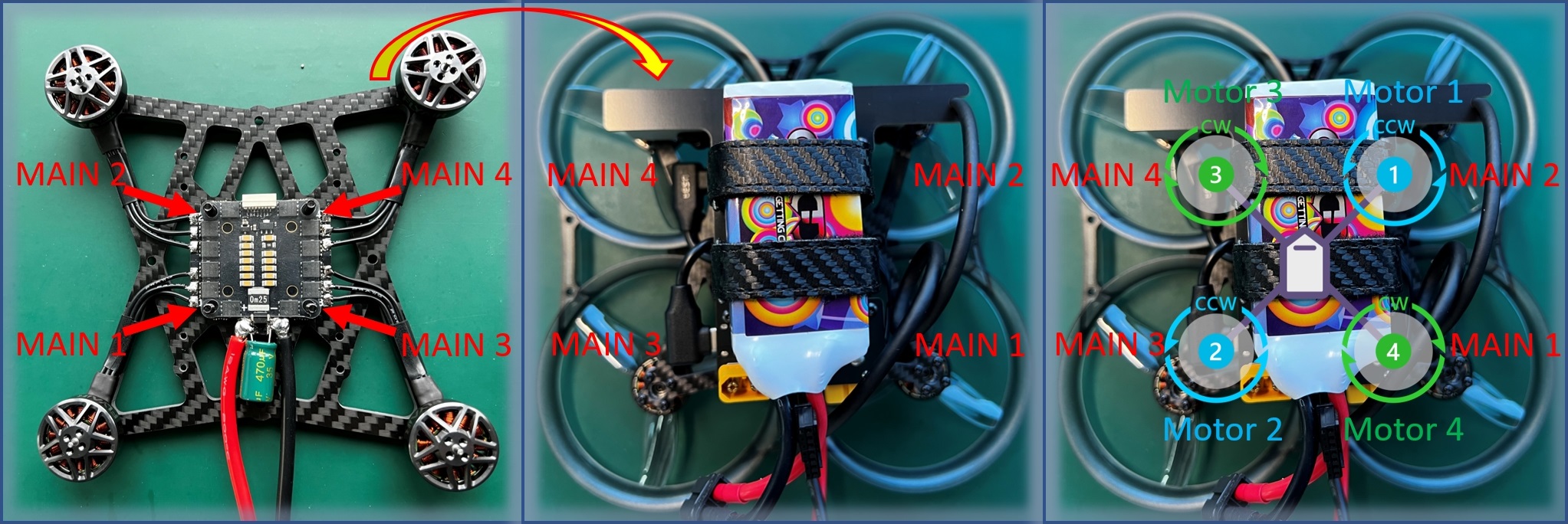
以《飞行平台搭建篇》中 微空MVD35 飞行平台为例,红色标记(# 1-4)为硬件物理通道序号(电调序号),蓝色和绿色标记(Motor1-4)为机架逻辑通道顺序,找到它们的对应关系
-
电机对应关系为:# 1-Motor4;# 2-Motor1;# 3-Motor2;# 4-Motor3
-
-
设置电机顺序
-
Mission Planner -> 初始设置 -> >> 必要硬件 -> Servo Output -> 按照对应关系选择
-
上一步骤中确定了 MVD35 的电机对应关系为:# 1-Motor4;# 2-Motor1;# 3-Motor2;# 4-Motor3

-
-
立即生效
-
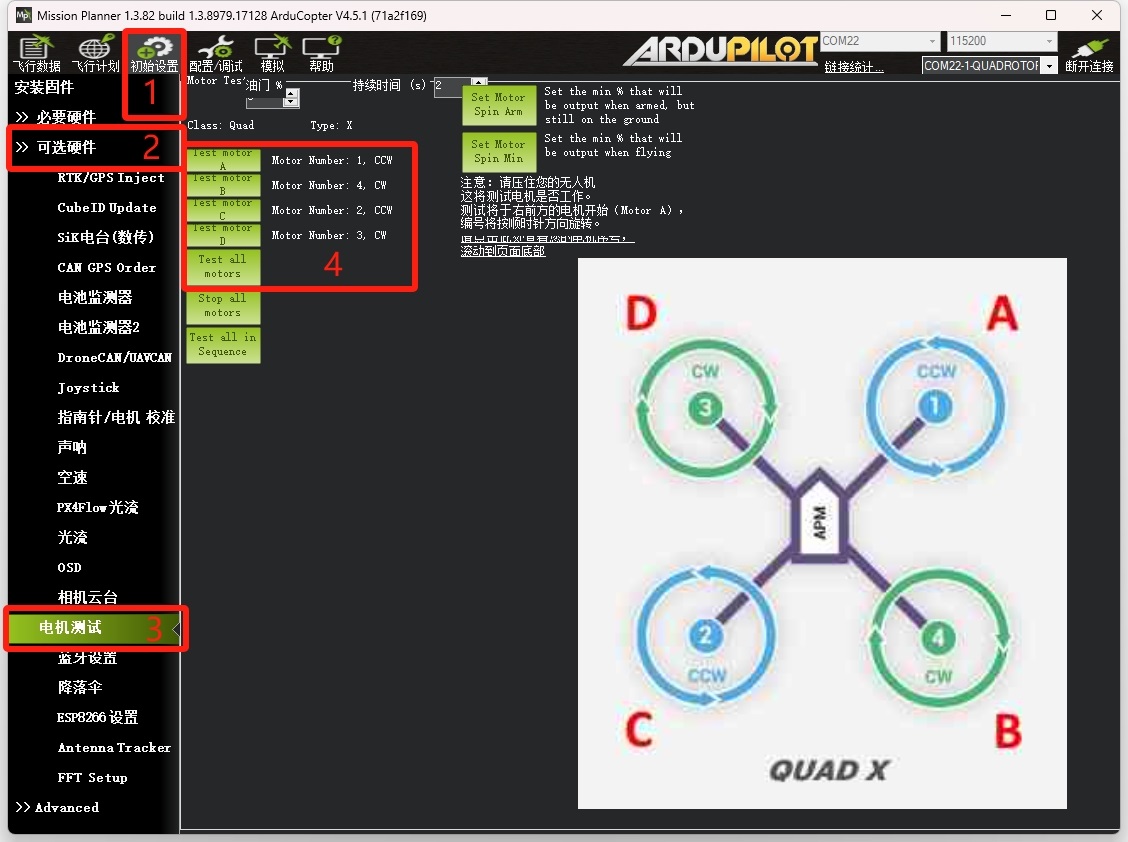
验证电机顺序
-
Mission Planner -> 初始设置 -> >> 可选硬件 -> 电机测试 -> Test motor A / B / C / D
-
点击不同 Test motor A / B / C / D,如图对应位置的电机转动,则电机顺序设置正确
-
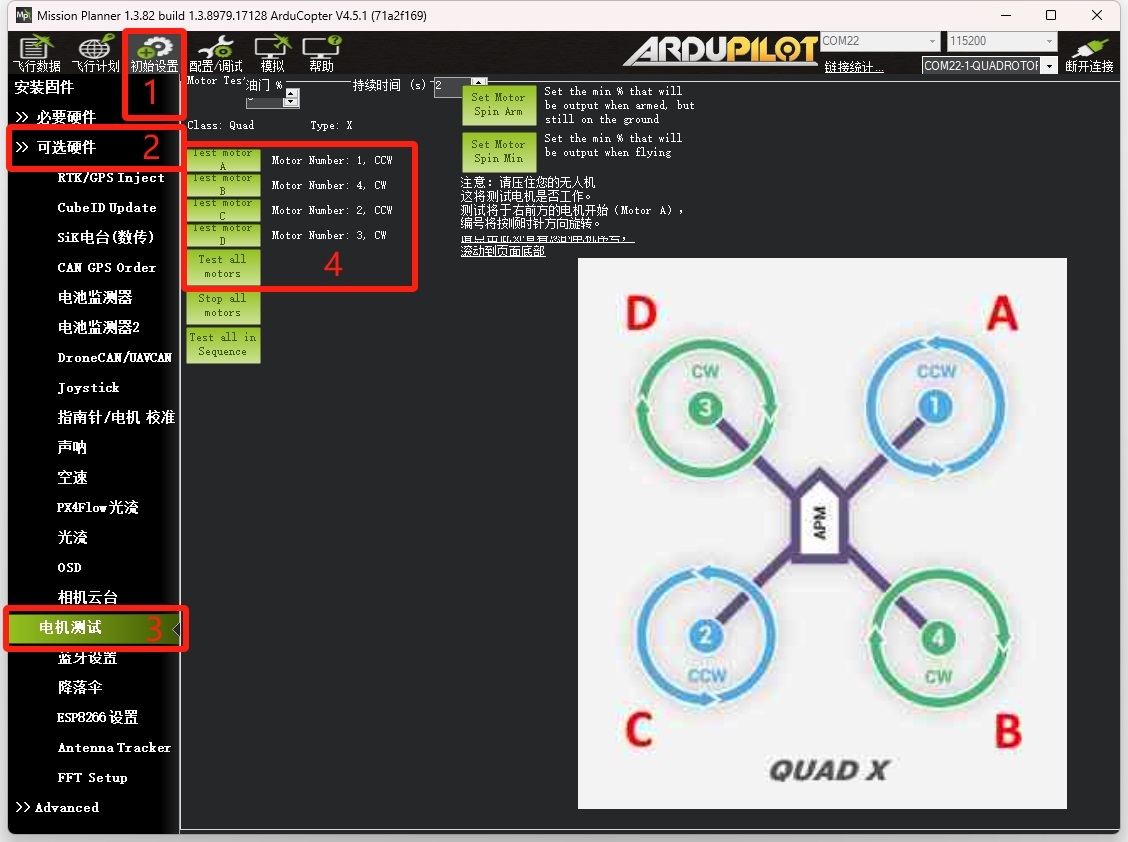
5. 设置电机转向
Ardupilot 除了需要设置电机的对应关系,同时需要保证各个位置上电机的转向与指定的转向相同。详细介绍可参考 Ardupilot 官方说明文档:https://ardupilot.org/copter/docs/connect-escs-and-motors.html
-
测试电机转向
-
Mission Planner -> 初始设置 -> >> 可选硬件 -> 电机测试 -> Test motor A / B / C / D
-
电机测试过程中,检查电机转向是否为图中所示,并确认螺旋桨是否向下吹风,记录转向错误的电机(Motor1~4)
-
-
记录需要修改转向的电机对应电调序号
- 通过对应关系(MicoAir3.5'视觉版 飞行平台为例,对应关系为:# 1-Motor4;# 2-Motor1;# 3-Motor2;# 4-Motor3),找到需要修改转向的电机对应电调序号(# 1~4)
-
设置电调桥接
- Mission Planner -> 配置/调试 -> 全部参数表 -> SERVO -> 修改如下参数 -> 写入参数
SERVO_BLH_AUTO 1 SERVO_BLH_MASK 15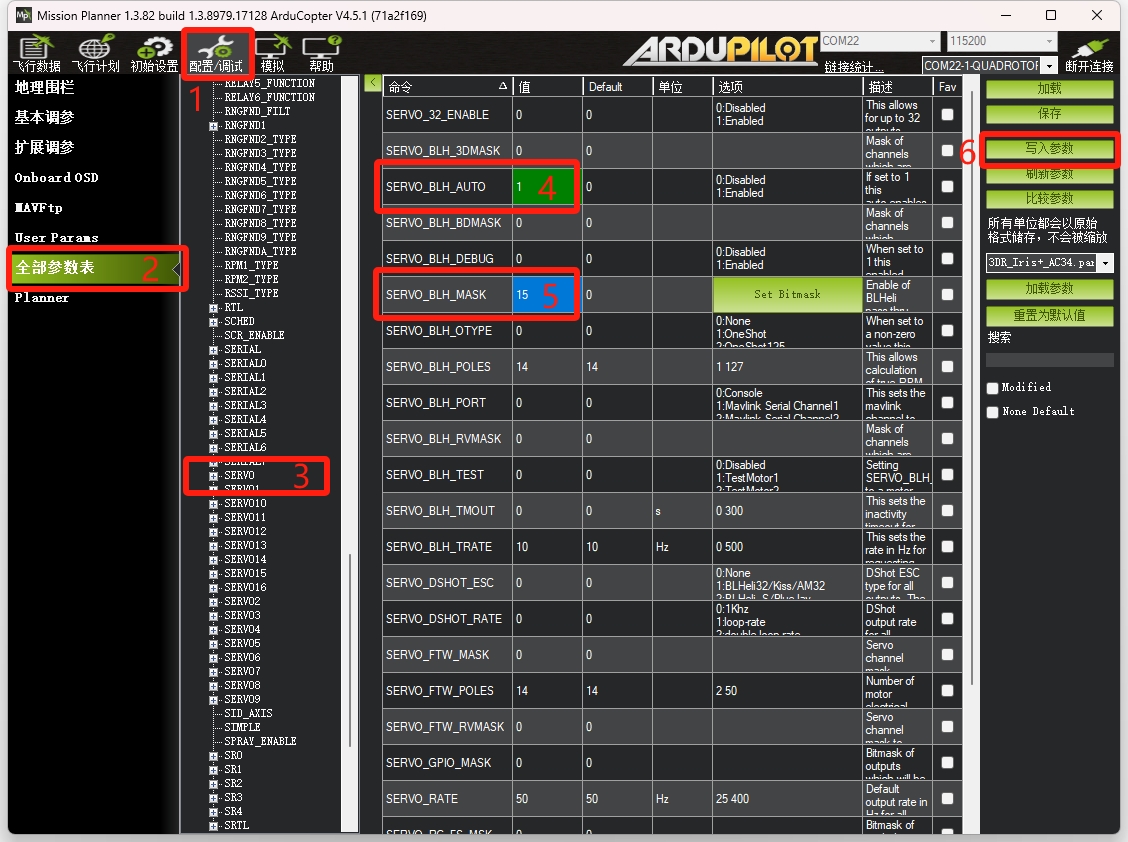
-
重启生效
-
断开 Mission Planner 连接
- Mission Planner -> 断开连接(右上角)

-
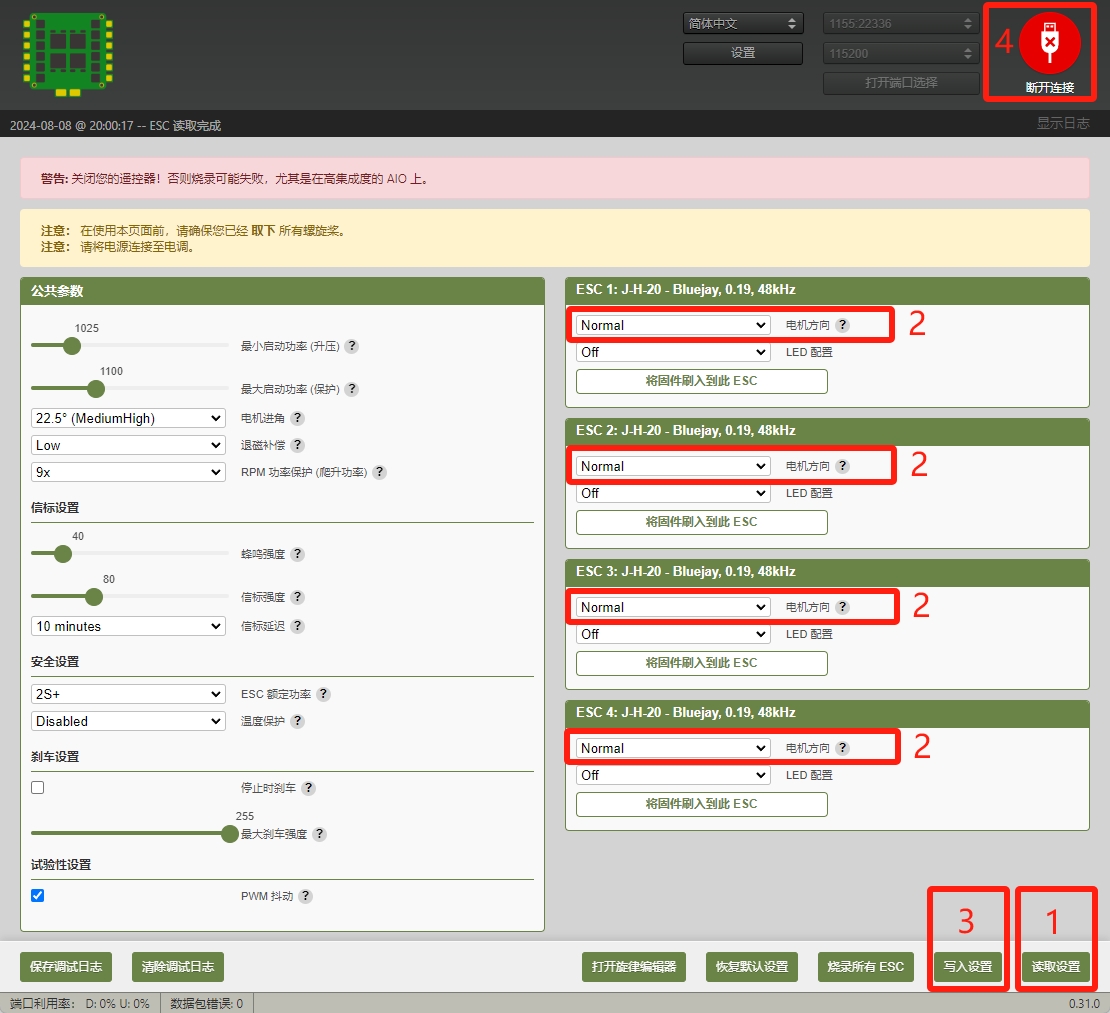
- 浏览器 -> esc-configurator.com -> 连接(首次连接需点击 打开端口选择,选择 MicoAir743)

-
esc-configurator.com 修改电机方向
- esc-configurator.com -> 读取设置 -> 将需要修改转向的电机,电机方向 由 Normal 改为 Reversed -> 写入设置 -> 读取设置 (确认修改成功) -> 断开连接
-
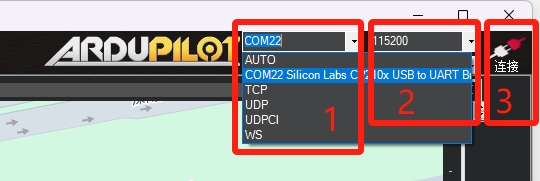
重新连接 Mission Planner
- Mission Planner -> 右上角选择 TRS 高频头端口 -> 波特率选择 115200 -> 连接
-
取消电调桥接
- Mission Planner -> 配置/调试 -> 全部参数表 -> SERVO -> 改回默认参数 -> 写入参数
SERVO_BLH_AUTO 0 SERVO_BLH_MASK 0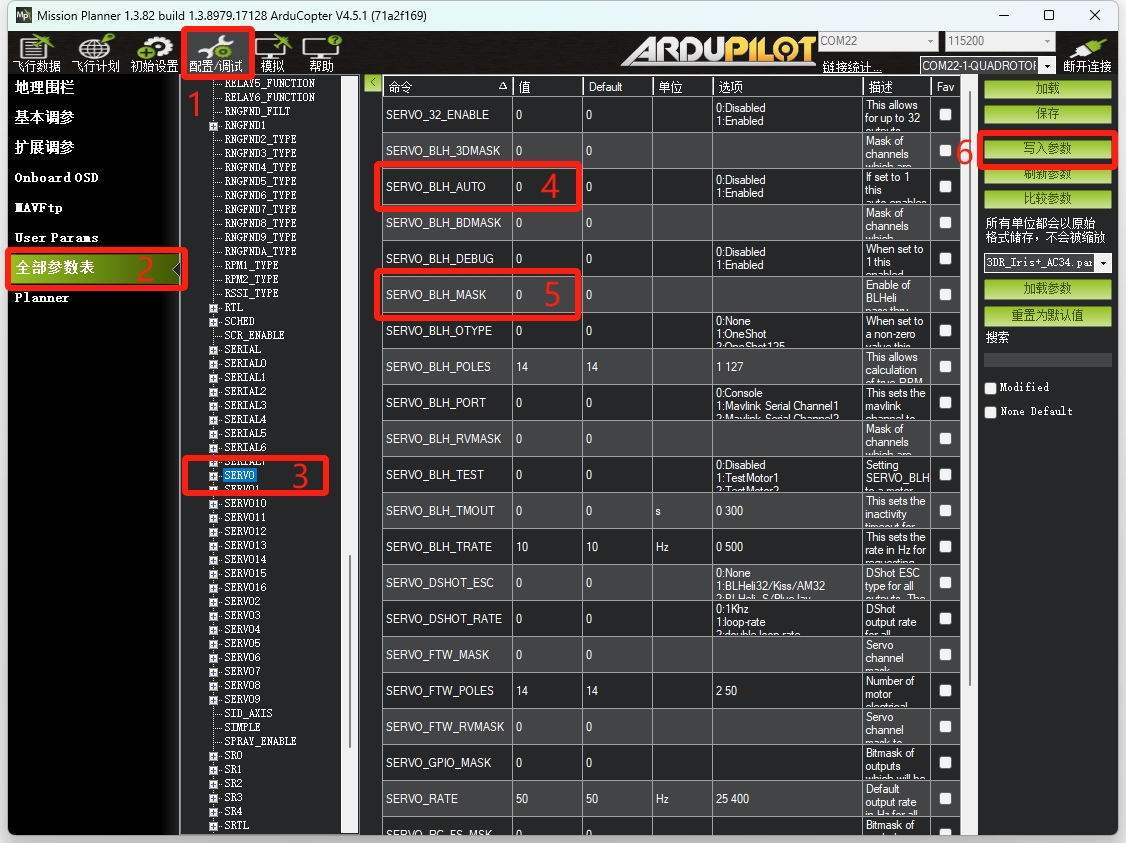
-
重启生效
-
验证电机转向
- 按照步骤 1. 测试并验证电机转向,确认修改成功,电机转向正确
6. 设置遥控通道
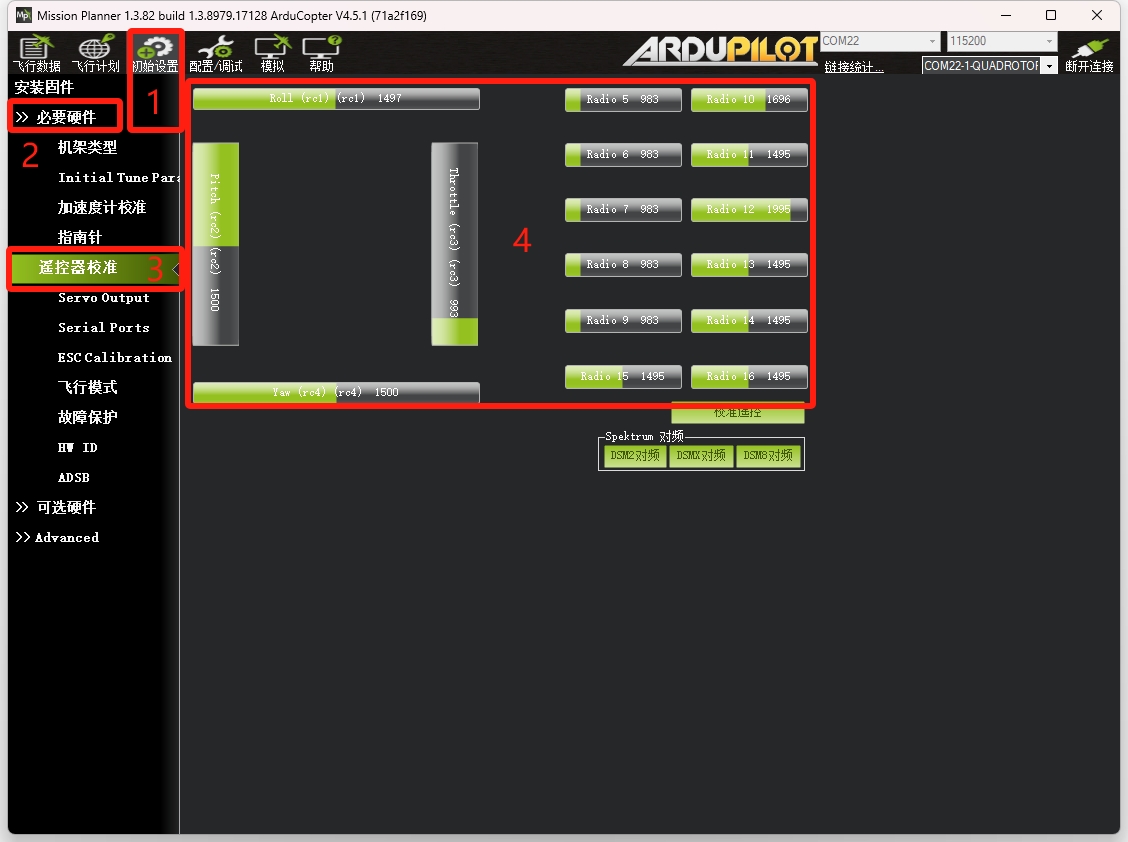
Ardupilot 具有默认的遥控通道对应功能(RC1 - Roll, RC2 - Pitch, RC3 - Throttle, RC4 - Yaw, RC5 - Flight Mode),也可以为其它通道分配不同的功能,需要提前确定遥控器上不同的拨杆开关及按键对应的通道,以便分配功能后能够准确控制。
-
确认遥控器通道对应情况
-
Mission Planner -> 初始设置 -> >> 必要硬件 -> 遥控器校准
-
遥控器校准 页面实时显示通道状态,移动摇杆、拨动拨杆开关或按下按键,测试遥控器上摇杆、拨杆开关和按键对应的通道
-
-
设置 PITCH (rc2)通道反向
-
对于 Ardupilot Copter 固件,当遥控器 PITCH 摇杆打到最低位置时,遥控器校准 页面 PITCH (rc2)通道应该为最大值。如果不是,需要设置该通道反向
-
Mission Planner -> 配置/调试 -> 全部参数表 -> RC2 -> 修改如下参数 -> 写入参数
RC2_REVERSED 1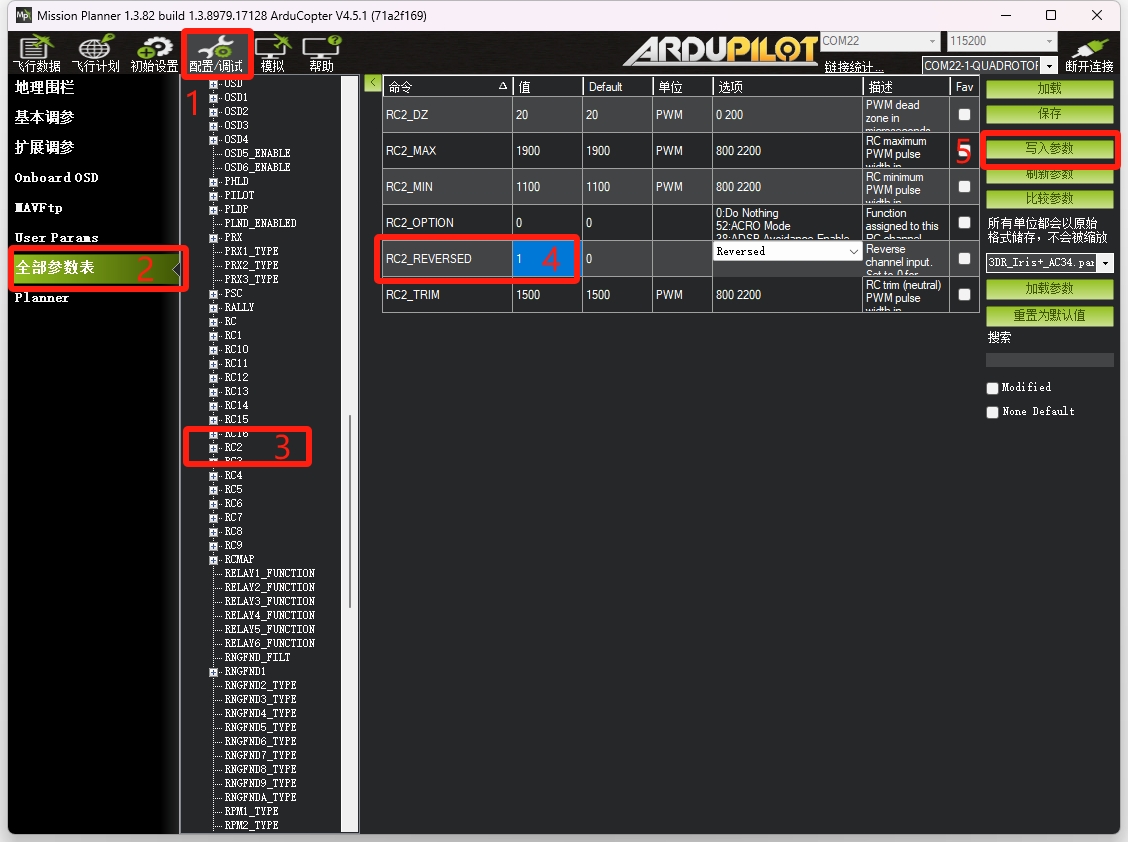
-
-
立即生效
-
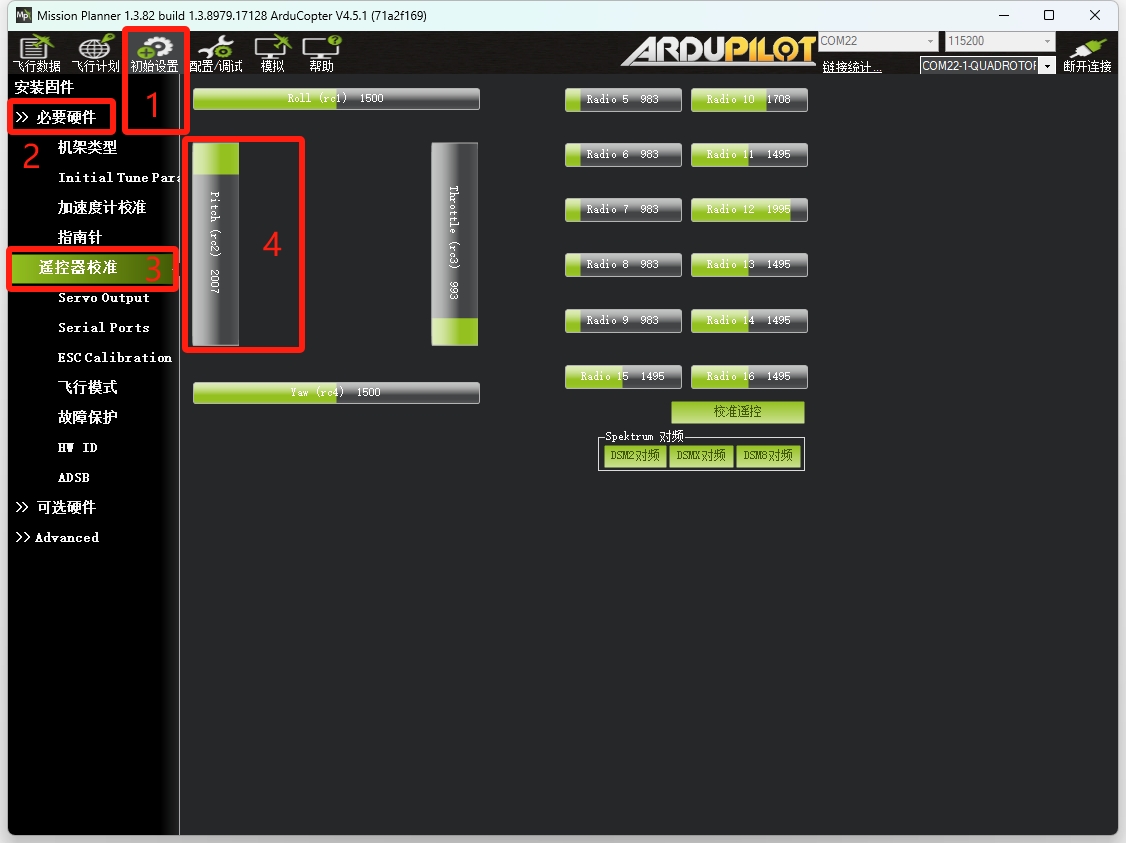
验证确认
-
Mission Planner -> 初始设置 -> >> 必要硬件 -> 遥控器校准
-
拨动 PITCH 摇杆,确认已经反向(如下图,PITCH 摇杆已打到最低位置)
-
7. 设置飞行模式
Ardupilot 支持多种飞行模式,满足不同环境下的飞行需求。具体飞行模式介绍参考 Ardupilot 官方说明文档:https://ardupilot.org/copter/docs/flight-modes.html
-
设置飞行模式
-
Mission Planner -> 初始设置 -> >> 必要硬件 -> 飞行模式 -> 设置对应的飞行模式 -> 保存模式
-
Ardupilot 默认使用通道5来切换飞行模式,拨动遥控器上通道5对应拨杆,对应选中的模式在界面上为高亮状态,确认好各个位置对应的模式
-
通常设置 飞行模式 1 = Stabilize;飞行模式 4 = AltHold;飞行模式 6 = Loiter

-
-
立即生效
-
验证飞行模式
-
Mission Planner -> 飞行数据 -> 遥控器通道5切换飞行模式
-
切换飞行模式,查看当前飞行模式是否与设置一致;可进入该飞行模式会显示 准备解锁,未满足该飞行模式条件会报错并显示 未准备解锁

-
8. 设置 PID
-
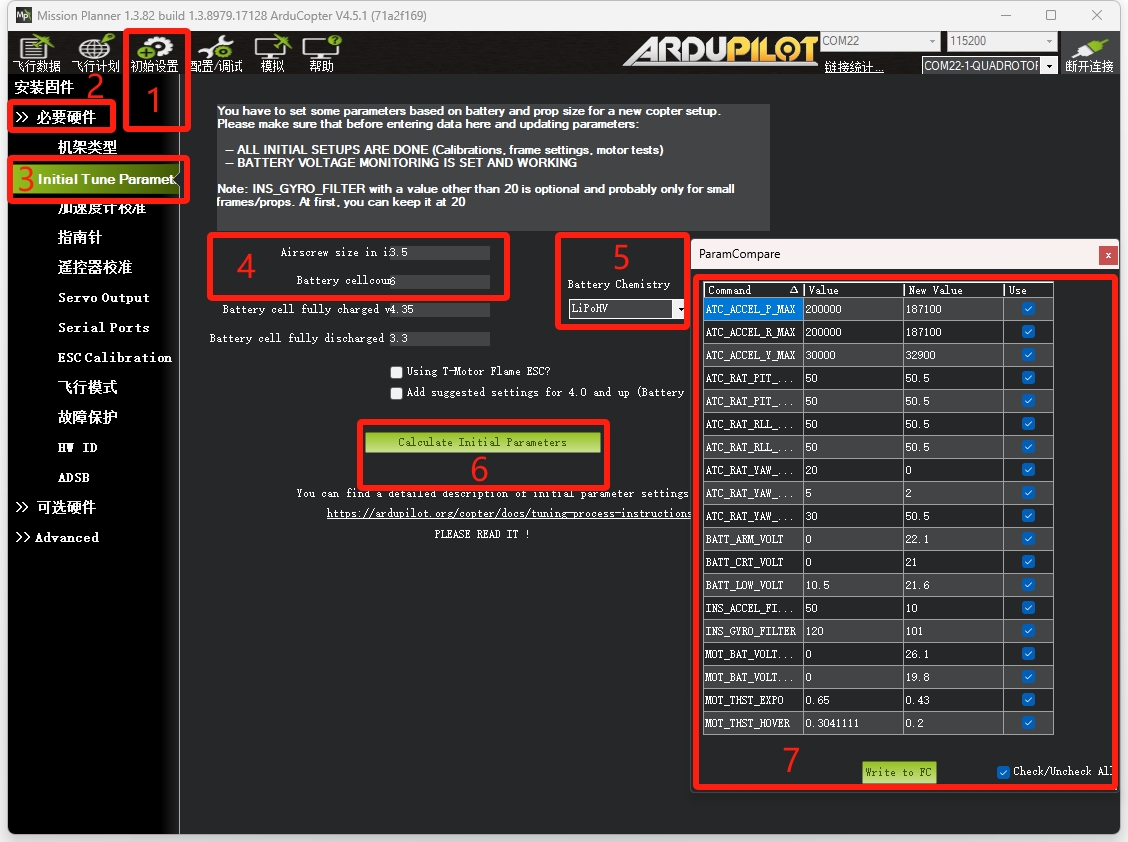
预设 PID 参数
-
Mission Planner -> 初始设置 -> >> 必要硬件 -> Initial Tune Parameter
-
Airscrew size in inch 填入 3.5;Battery cellcount 填入 6 -> Battery Chemistry 选择 LiPoHV -> Calculate Initial Paramters
-
弹出的参数框勾选想要修改的参数(默认全选) -> Write to FC
-
-
立即生效
-
手动调参
-
实际使用场景或飞行测试过程中,根据实际无人机表现及自身飞行习惯调节 PID 参数
-
Mission Planner -> 配置/调试 -> 扩展调参 -> 根据实际情况调节 PID 参数 -> 写入参数
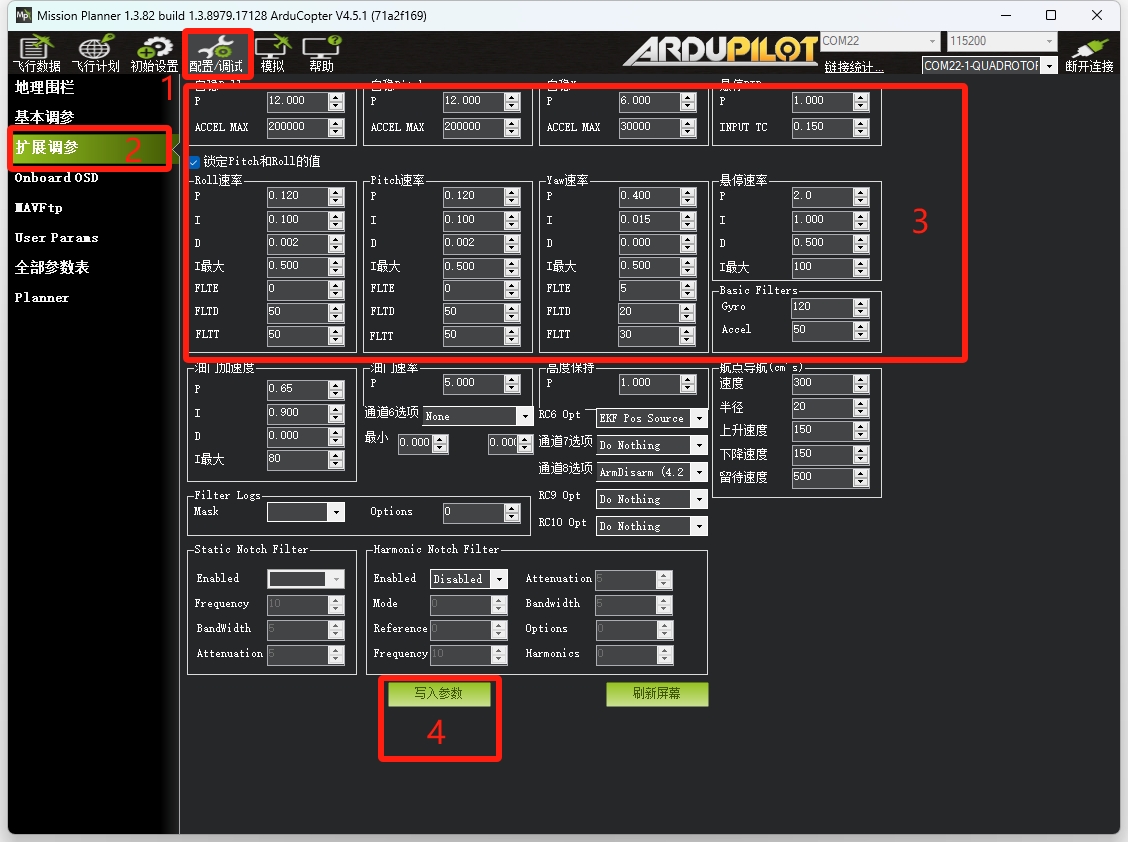
-
-
立即生效
9. 校准传感器
-
校准加速度计、校准水平
- Mission Planner -> 初始设置 -> >> 必要硬件 -> 加速度计校准
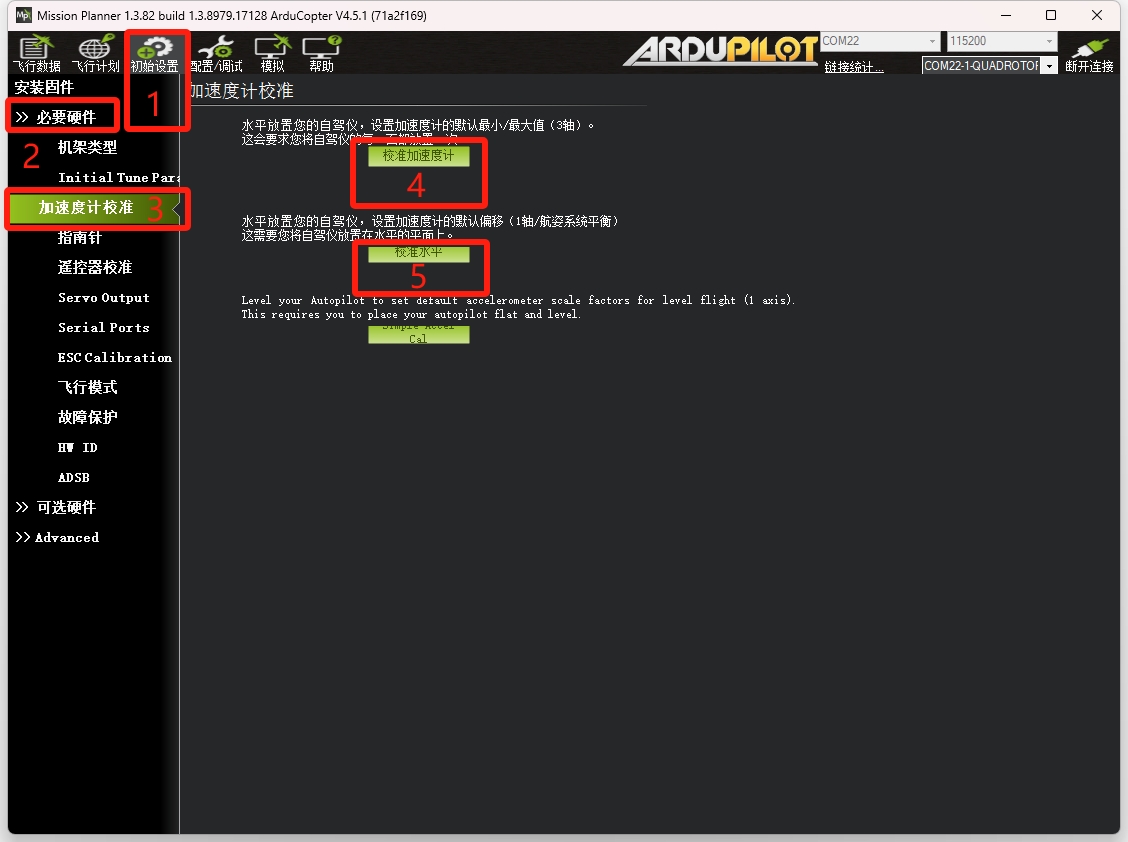
-
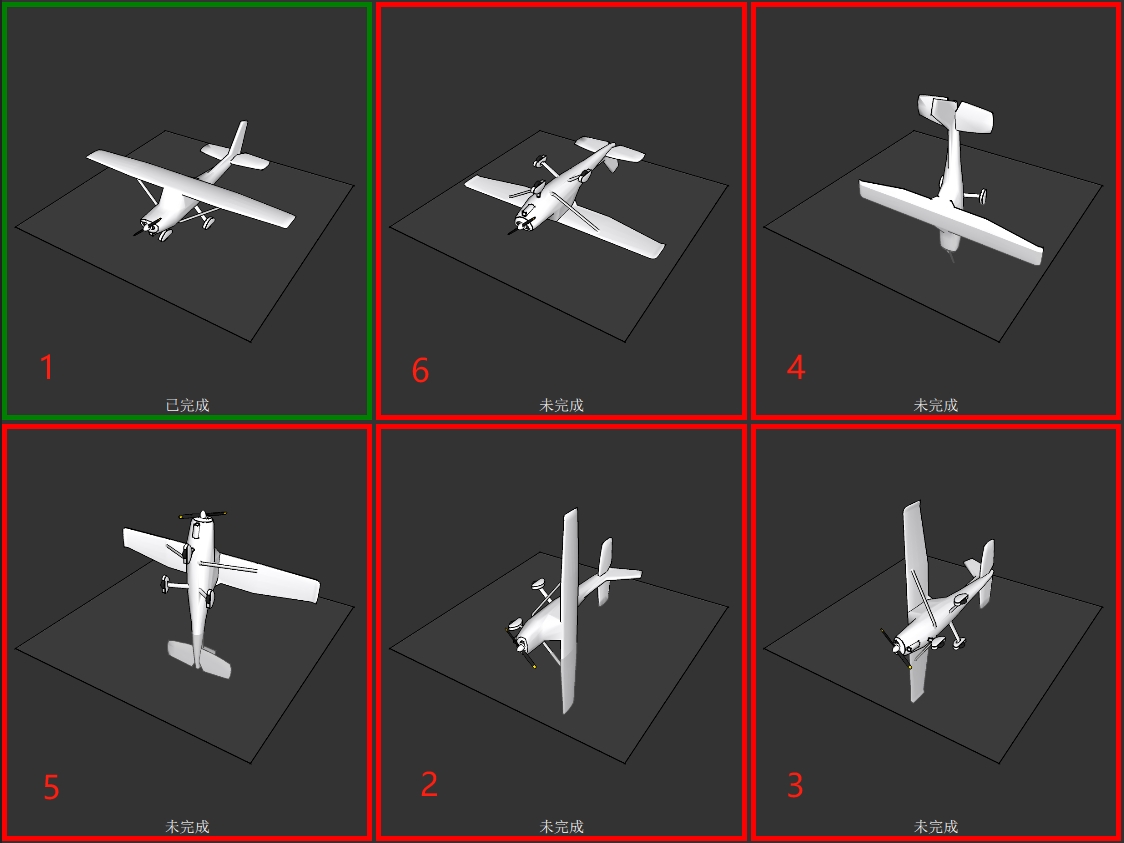
校准加速度计 按照提示,保持无人机 6 种方向姿态(水平、左侧朝地、右侧朝地、机头朝地、机尾朝地、倒置),保持该姿态并点击 Click when Done 进入下一个姿态,完成校准将显示 Calibration successful
-
无人机 6 种方向姿态参考下图:1.水平、2.左侧朝地、3.右侧朝地、4.机头朝地、5.机尾朝地、6.倒置
- 校准水平 按照提示,将无人机水平放置在地面上并点击 校准水平 即可
-
重启生效
-
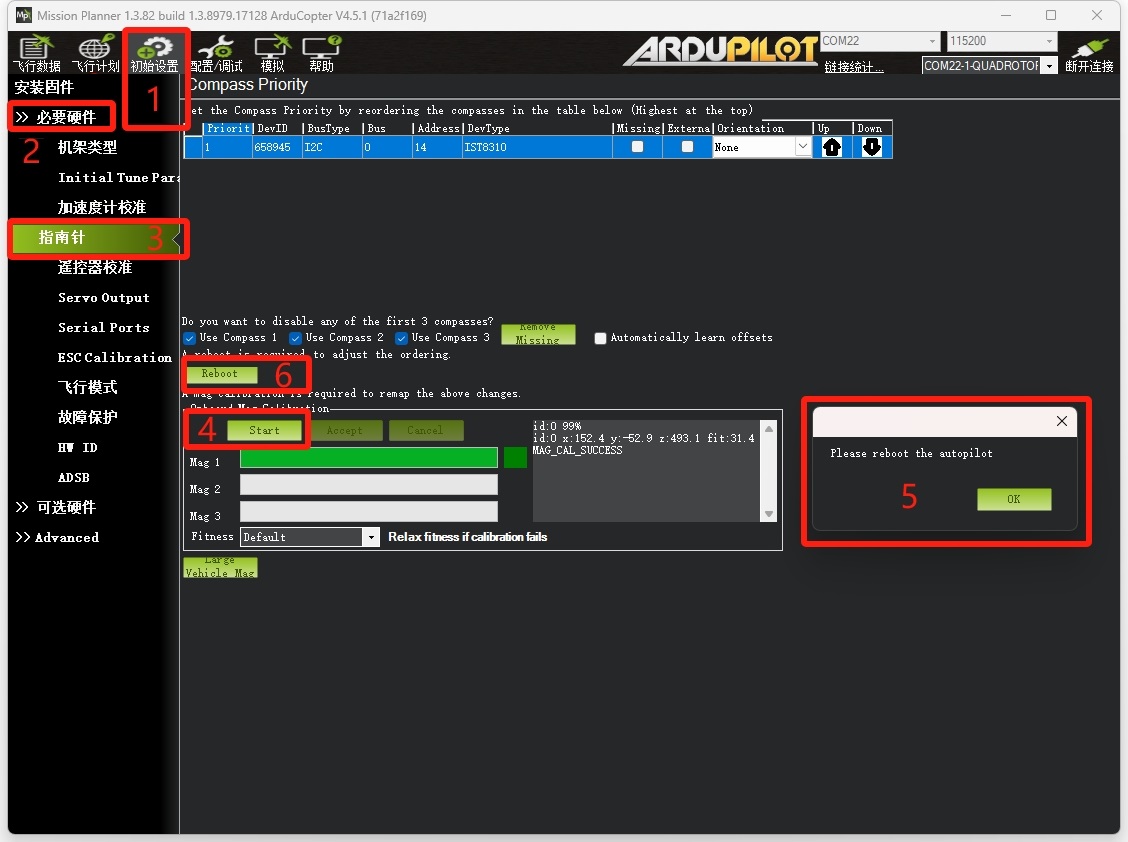
校准指南针
-
Mission Planner -> 初始设置 -> >> 必要硬件 -> 指南针 -> Start
-
点击 Start 后,开始校准指南针,下方及右侧窗口显示校准进度,校准过程需要远离金属、磁铁之类的干扰源,将飞机沿着各个方向转动
-
校准完成会有弹窗提示 Please reboot the autopilot -> 点击 OK 关闭弹窗 -> 点击 Reboot 重启无人机
-
-
重启生效
-
验证校准结果
-
Mission Planner -> 飞行数据
-
将无人机放置在地上或者水平时,验证地面站姿态窗口是否水平;同时验证无人机方向角度是否与实际朝向一致(可参考手机罗盘方向,角度偏差在 5° 以内即可)
-
10. 解锁设置
-
设置解锁检查
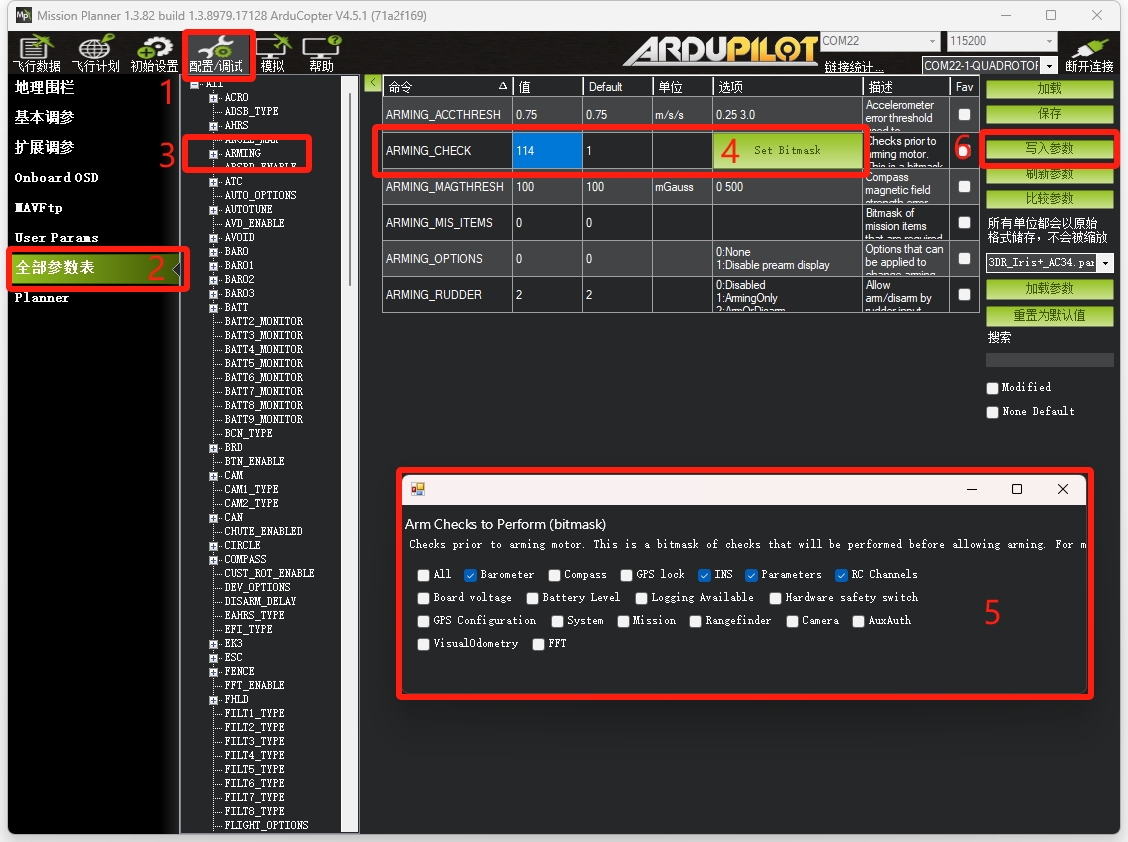
- Mission Planner -> 配置/调试 -> 全部参数表 -> ARMING -> 点击 ARMING_CHECK 的 选项 列,选择 Set Bitmask -> 弹窗中取消 All 并勾选几个必要的检查 -> 写入参数
-
立即生效
-
设置通道解锁/上锁
- Mission Planner -> 配置/调试 -> 全部参数表 -> 选择用于解锁/上锁的通道(以 RC8 为例) -> 修改如下参数 -> 写入参数
RC8_OPTION 153
-
立即生效
-
验证解锁设置
-
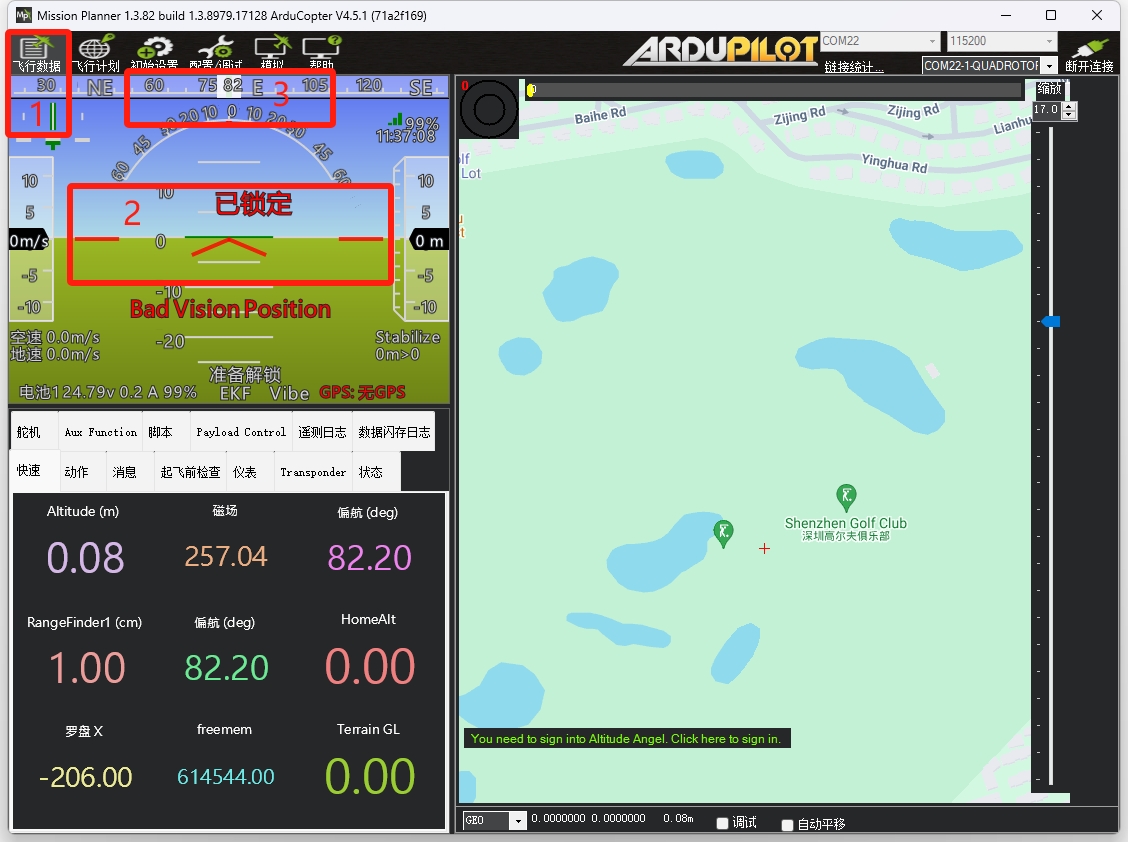
Mission Planner -> 飞行数据
-
姿态窗口显示 准备解锁,则表示该飞行模式下 解锁检查 通过,且满足该模式飞行条件
-
Ardupilot 默认解锁方式为摇杆解锁:油门摇杆打到右下持续3秒为解锁;在落地状态下,未操作油门摇杆 15 秒自动上锁;在落地状态下,油门摇杆打到左下持续3秒为上锁
-
设置的通道解锁/上锁,通道值由低变高的上升沿为解锁;通道值由高变低的下降沿为上锁;同样在落地状态下,未操作油门摇杆 15 秒自动上锁
-
通道上锁与摇杆上锁不同,通道上锁无需检测无人机是否为落地状态,直接上锁,电机停转,这在某些应急状况可以使用
-
通道解锁和摇杆解锁为并存状态,可以混合使用,解锁状态下再次发送解锁信号,或上锁状态下再次发送上锁信号并不会对当前状态有任何影响
-
姿态窗口显示 已锁定 和 已解锁 表示解锁上锁状态,通过通道解锁和摇杆解锁测试验证解锁设置

-
11. 测试飞行
-
打开遥控器
-
MVD35 电池上电
-
TRS 高频头USB连接到电脑
-
连接 Mission Planner,检查 Mission Planner 上数据状态
-
Mission Planner -> 飞行数据 -> 消息
-
在 消息 界面可以看到飞控消息;姿态窗口查看 飞行模式、电池电压、航向、是否准备解锁 等信息

-
-
飞行测试
-
在空旷安全的场地进行飞行测试
-
首先练习自稳 Stabilize 飞行模式:确认无人机数据没有异常后,在 Stabilize 模式下解锁,轻推油门,使无人机离地,熟悉摇杆控制效果和该飞行模式
-
接着练习定高 AltHold 飞行模式:熟练掌握 Stabilize 飞行模式后,可以练习 AltHold 飞行模式,AltHold 飞行模式油门摇杆居中则保持高度保持状态,该模式下起飞需要将油门摇杆拉至中点以上,离地 30cm 以上后可以回中保持定高,避免地面效应导致高度发散
-
熟练掌握两种飞行模式后,可以练习在飞行状态中切换模式:飞行状态中切换模式时,需要注意油门摇杆的位置,避免窜天或急速下降
-
-
总结与改进
-
根据飞行测试过程中无人机的表现和操作习惯,调节 PID 、顺手的通道设置或其它设置
-
飞行完成后,可通过 Mission Planner 下载日志,并通过日志针对具体情况进行分析
-
其它拓展性设置根据实际飞行应用场景进行设置
-
Ardupilot 基础飞行设置完成,后续内容请参考微空科技无人机视觉导航教程系列《机载电脑环境配置(树莓派4B+T265)》或《双目VIO算法实现与应用(树莓派5+D435i)》;下面内容为 PX4 基础飞行设置。
PX4 基础飞行设置
0.准备内容
-
硬件准备
-
微空MVD35 飞行平台,MicoAir743飞控,烧录PX4固件
-
遥控器(加装微空 TRS 遥数一体高频头)
-
USB A - C 数据线,USB 延长线
-
-
软件准备
- QGroundControl,官方下载链接:https://d176tv9ibo4jno.cloudfront.net/latest/QGroundControl-installer.exe
-
使用技巧
-
重启无人机:方法一:硬件重启——飞控断电后重新上电;方法二:软件重启—— QGroundControl -> Vehicle Setup -> 参数 -> 工具 -> 重启飞行器
-
无线连接时,重启无人机后需要手动连接:QGroundControl -> Application Settings -> 通讯连接 -> TRS -> 连接
-
1.设置数传连接
MVD35 飞行平台配备了 微空 2.4G TRS 遥数一体链路,支持无线化数据传输,为后续的设置和调试过程提供了极大的便利,所以首先进行数传部分的设置。
QGroundControl 默认数传连接波特率为 57600(可以自动连接),但由于视觉传感器数据量较大,TRS需要设置为高速模式,波特率自动变更为115200,需要手动设置连接。重启无人机后,需要再次手动连接到无人机。
-
连接 QGroundControl (有线)
-
将树莓派上连接飞控的 USB 头拔出,接入 USB 延长线连接到电脑
-
QGroundControl 会自动识别并连接飞控
-
-
设置数传串口
-
QGroundControl -> Vehicle Setup -> 参数
-
MAVLink -> 修改如下参数
MAV_0_RATE 8000 B/S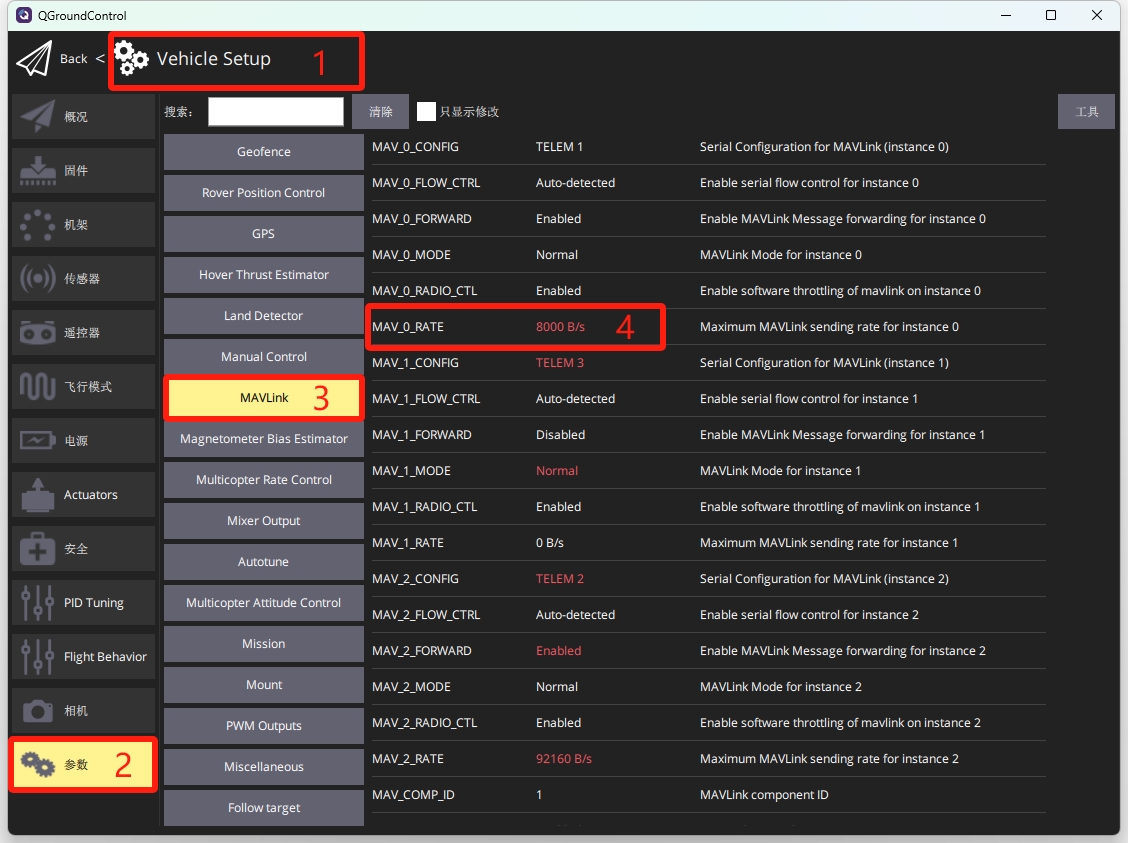
- Serial -> 修改如下参数
SER_TEL1_BAUD 115200 8N1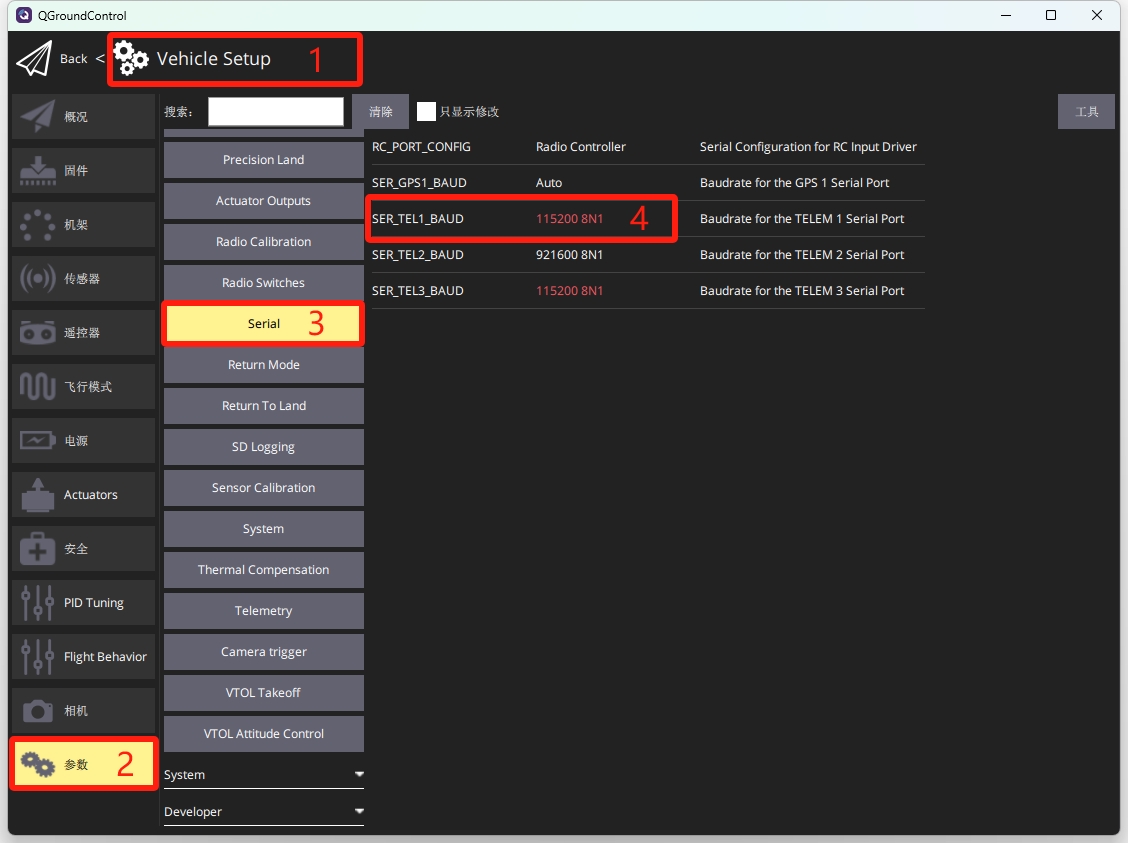
-
-
重启生效
-
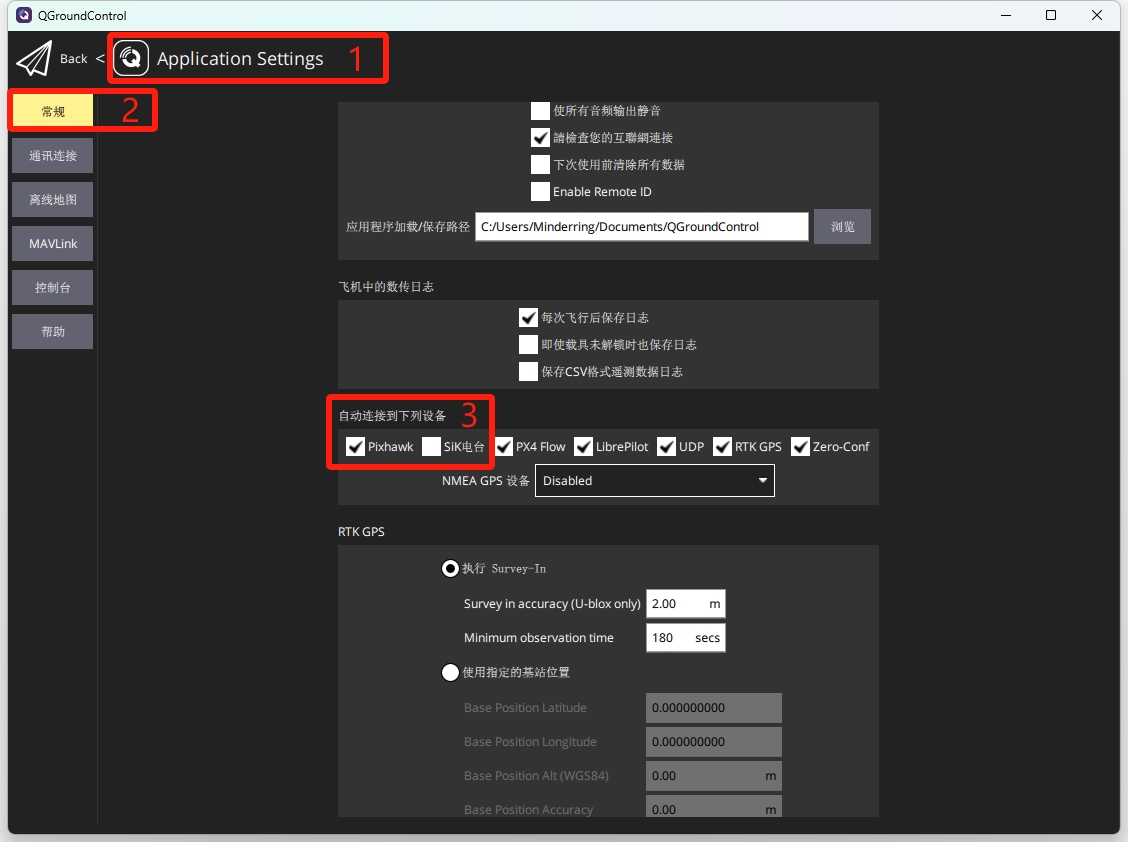
设置 QGroundControl 数传连接
- QGroundControl -> Application Settings -> 常规 -> 自动连接到下列设备 取消勾选 SiK电台
-
连接 QGroundControl (无线)
-
将飞控 USB 头重新插回树莓派
-
插上电池,启动无人机
-
打开遥控器,使用 USB A - C 数据线连接遥控器上 TRS 高频头与电脑
-
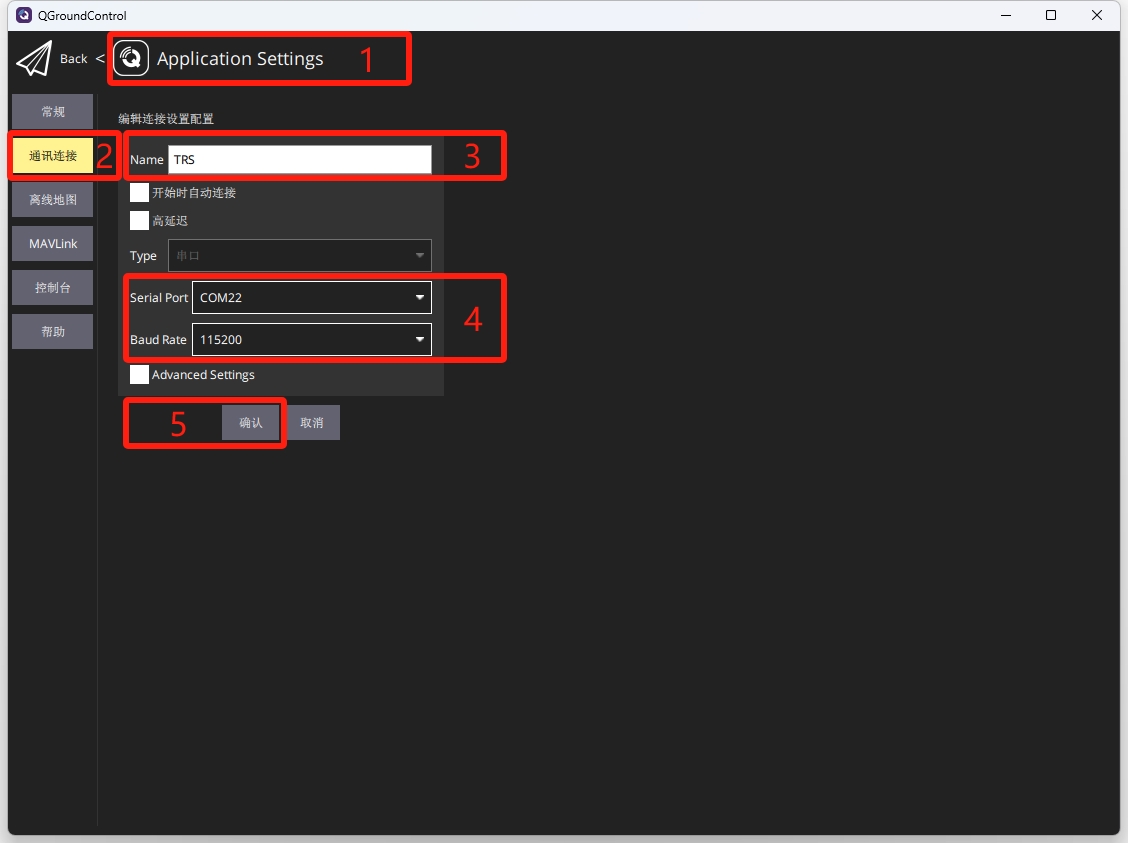
QGroundControl -> Application Settings -> 通讯连接 -> 添加
-
在 编辑连接设置配置 -> 填入 Name (以 TRS 为例) -> 选择 TRS 对应 Serial Port -> Baud Rate 选择 115200 -> 确认
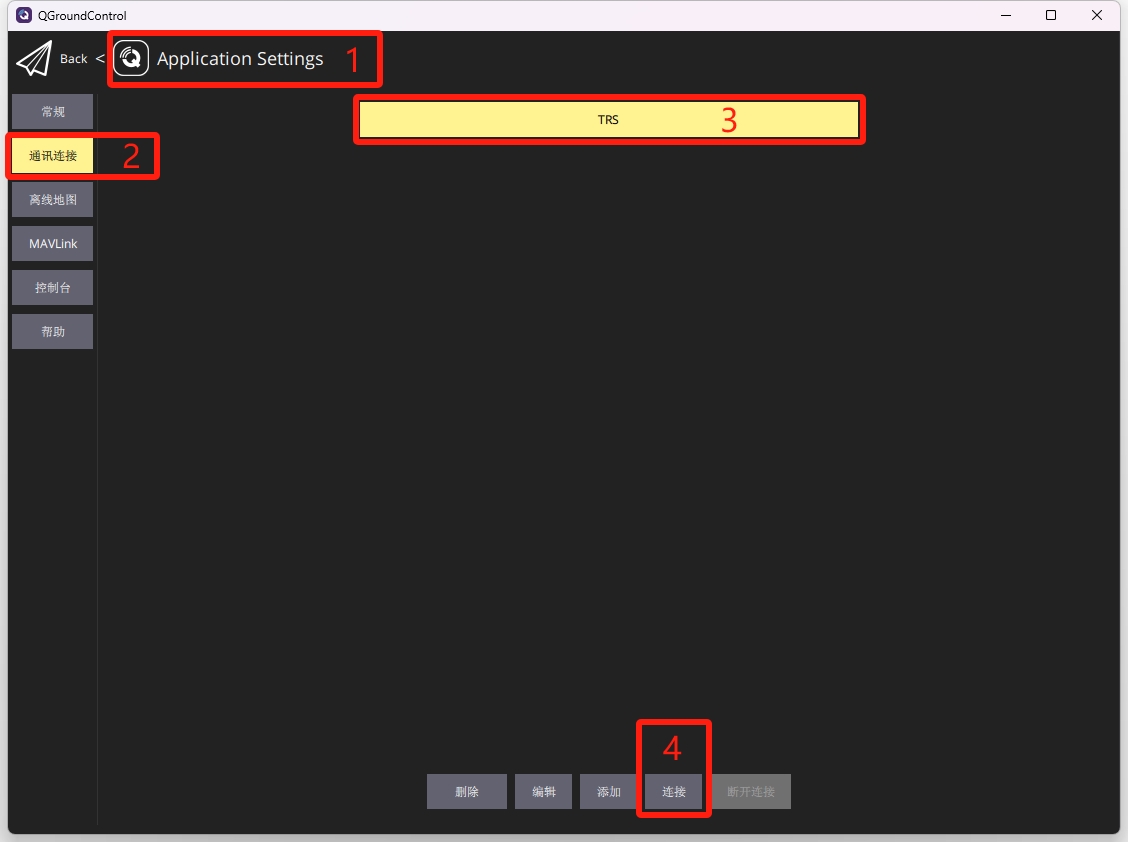
- QGroundControl -> Application Settings -> 通讯连接 -> TRS -> 连接
-
-
确认连接状态
-
QGroundControl -> Back 回到主界面,界面状态与有线连接时相同
-
无线连接时,重启无人机后需要重新手动连接:QGroundControl -> Application Settings -> 通讯连接 -> TRS -> 连接
-
2.设置机架类型
PX4-Autopilot (以下简称 PX4)支持众多的机架类型,不同机架类型对应的硬件设置不同,需根据实际情况选择对应机架类型;MicoAir743 PX4 固件默认参数已预设机架类型为 四旋翼 X 型,与 微空MVD35 飞行平台采用机架类型相同,无需进行设置。
3.设置 Actuators(执行器)
Actuators 是 PX4 的执行器(包括电子调速器(ESC)、电机和伺服电机)。执行器通过绑定到飞控输出端口,控制无人机的飞行与动作。在 Actuators 页面可以设置 电调协议、电机位置、电机顺序、电机转向等。
PX4 支持多种电调通信协议:PWM、OneShot、DShot;微空MVD35 使用 DShot 协议且支持双向 DShot 转速回传;DShot 为数字协议信号,可以精确传递控制指令,无需进行电调信号校准;MicoAir743 PX4 固件默认参数已预设电调协议为 DShot300,无需进行设置。
PX4 可以灵活调整电机在机架中的位置及转向信息等,同时需要根据具体机架类型和电调的输出序号,确定电机的对应关系。详细介绍可参考 PX4 官方说明文档:https://docs.px4.io/main/en/config/actuators.html
-
设置电机位置
-
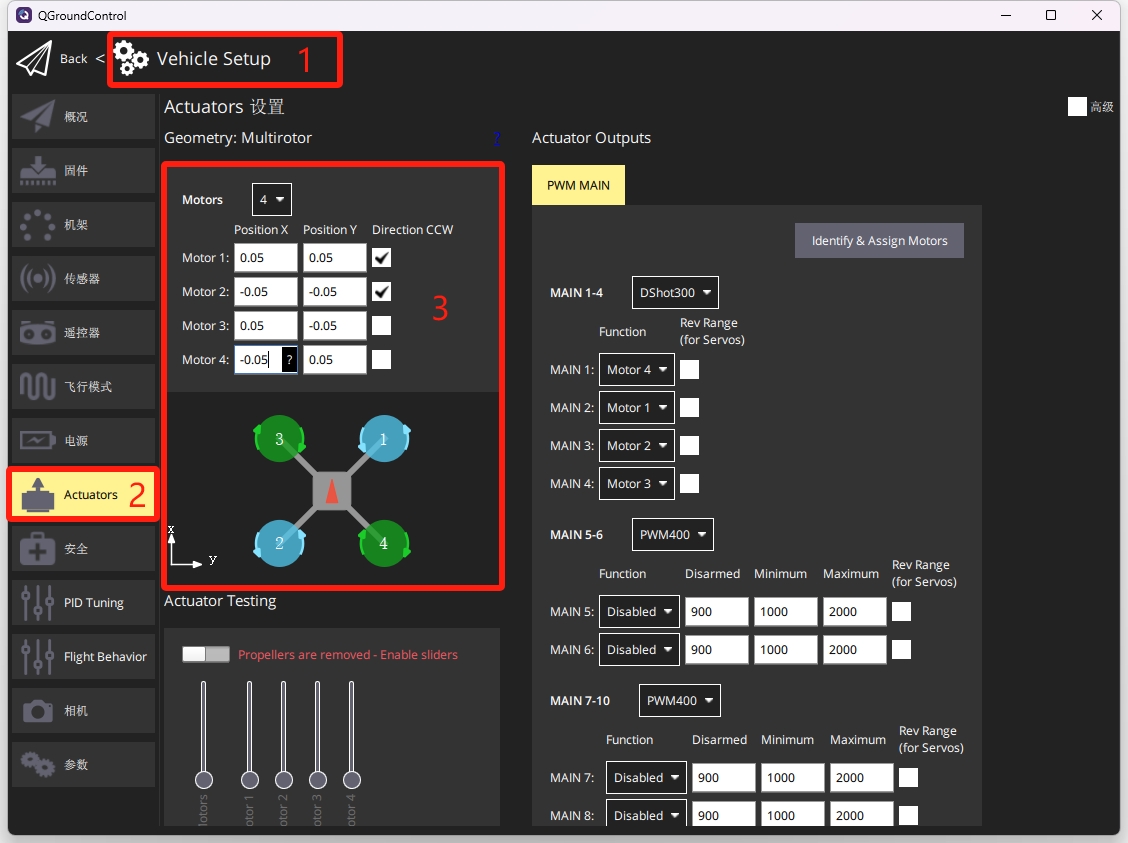
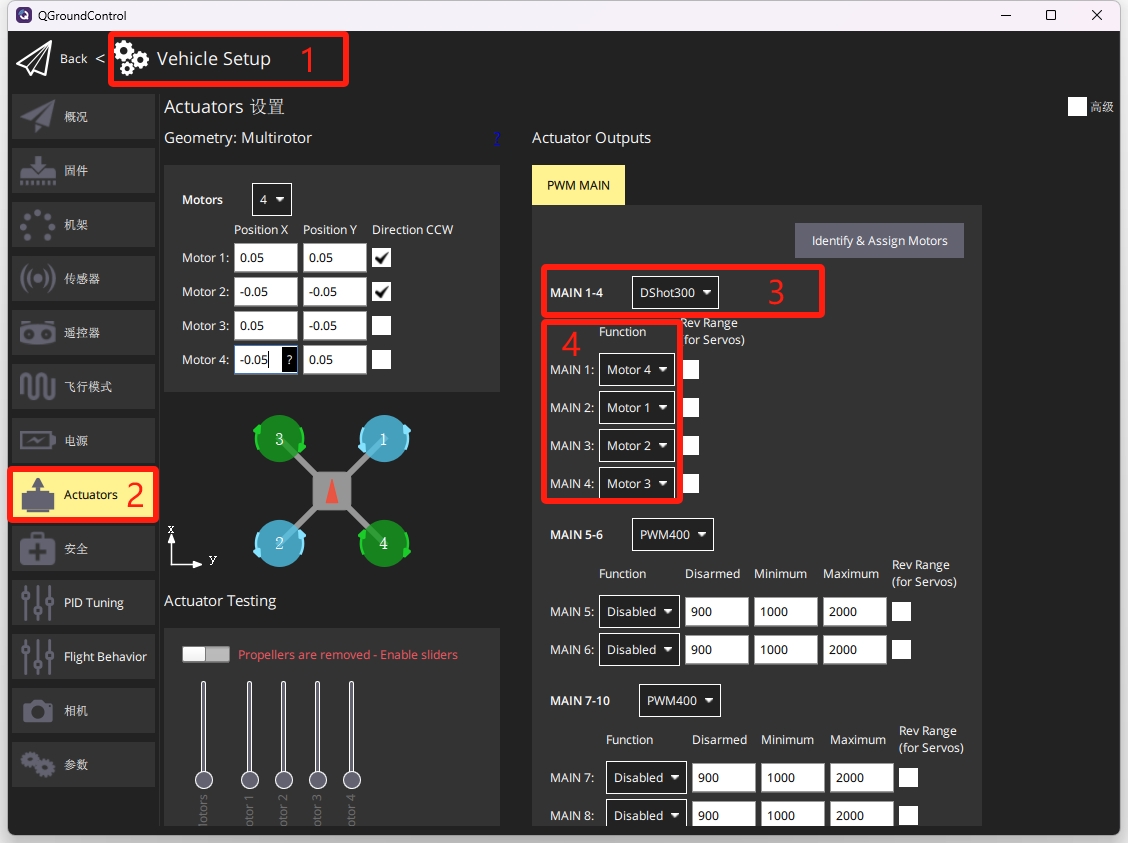
QGroundControl -> Vehicle Setup -> Actuators -> Geometry:Multirotor 部分 -> 修改 Motor 1~4 实际位置
-
以《飞行平台搭建篇》中 MVD35 飞行平台为例,电机偏移中心位置约为 0.05m,如图所示将参数填入对应位置,下方机架模型实时显示相对位置和比例关系
-
-
确定电机对应关系
-
以《飞行平台搭建篇》中 MVD35 飞行平台为例,红色标记(MAIN 1~4)为硬件物理通道序号(电调序号),蓝色和绿色标记(Motor 1~4)为机架逻辑通道顺序,找到它们的对应关系
-
电机对应关系为:MAIN 1 - Motor 4;MAIN 2 - Motor 1;MAIN 3 - Motor 2;MAIN 4 - Motor 3
-
-
设置电机顺序
-
QGroundControl -> Vehicle Setup -> Actuators -> Actuator Outputs 部分 -> PWM MAIN
-
MAIN 1-4 已默认设置为 DShot300 -> Function 填入对应关系
-
上一步骤中确定了 MVD35 的电机对应关系为:MAIN 1 - Motor 4;MAIN 2 - Motor 1;MAIN 3 - Motor 2;MAIN 4 - Motor 3
-
-
电机测试(测试电机顺序、修改电机转向)
-
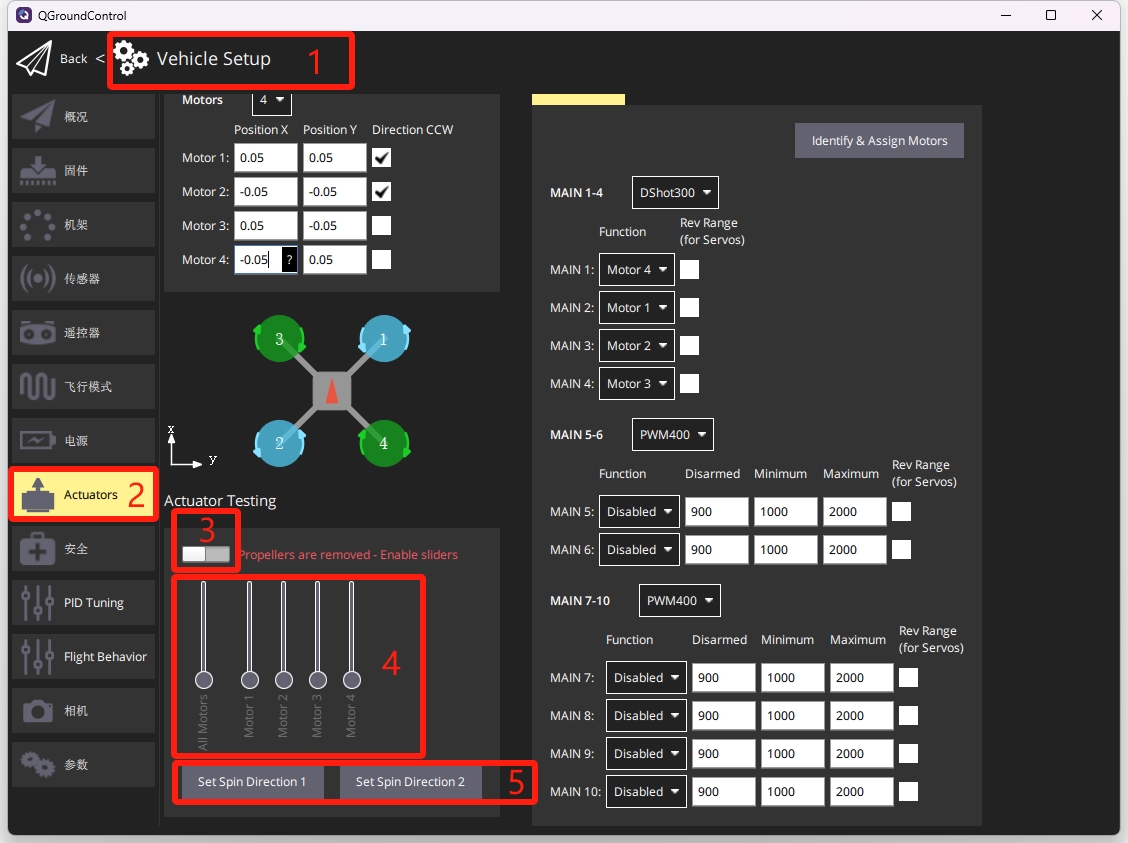
QGroundControl -> Vehicle Setup -> Actuators -> Actuator Testing 部分
-
拖动 Propellers are removed - Enable sliders 前方滑块,打开电机输出
-
拖动下方对应的 Motor 1~4 滑块,对应的电机会启动 -> 检查对应的电机和转动方向是否和 Geometry:Multirotor 部分 图示相同 -> 对应电机有误需要返回上一步骤检查并设置 -> 对应电机转向错误通过点击下方 Set Spin Direction 1 / 2 后,选择对应 Motor 1~4 修改电机转向,Set Spin Direction 1 为顺时针方向,Set Spin Direction 2 为逆时针方向
-
全部设置完成并验证后,拖动 Propellers are removed - Enable sliders 前方滑块,关闭电机输出
-
-
立即生效
4.遥控器校准
-
校准遥控器
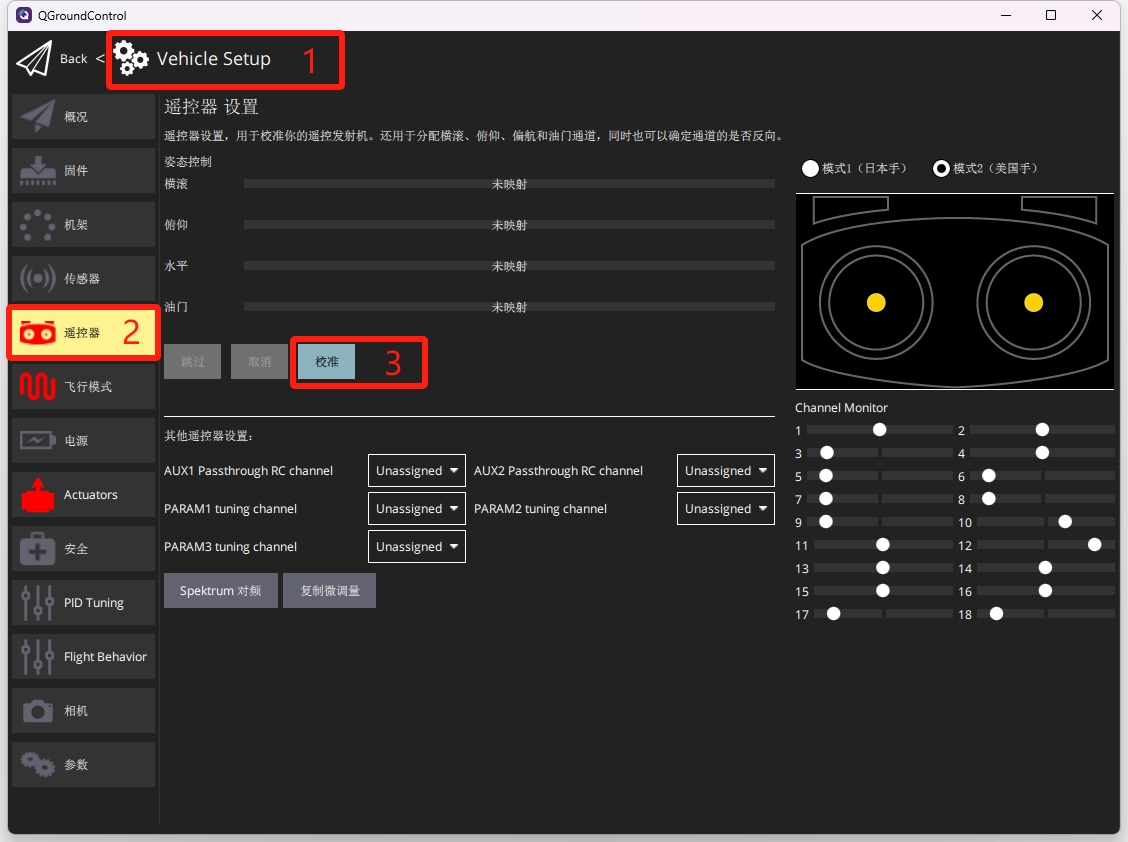
- QGroundControl -> Vehicle Setup -> 遥控器 -> 校准 -> 按照右边 模式2(美国手) (左手摇杆控制油门和航向;右手摇杆控制翻滚和俯仰)示意图指示,进行遥控器校准
-
校准完遥控器,可以通过 Channel Monitor 通道数值指示,确认遥控器上拨杆开关和按键对应的通道
-
立即生效
5.设置飞行模式
-
设置飞行模式
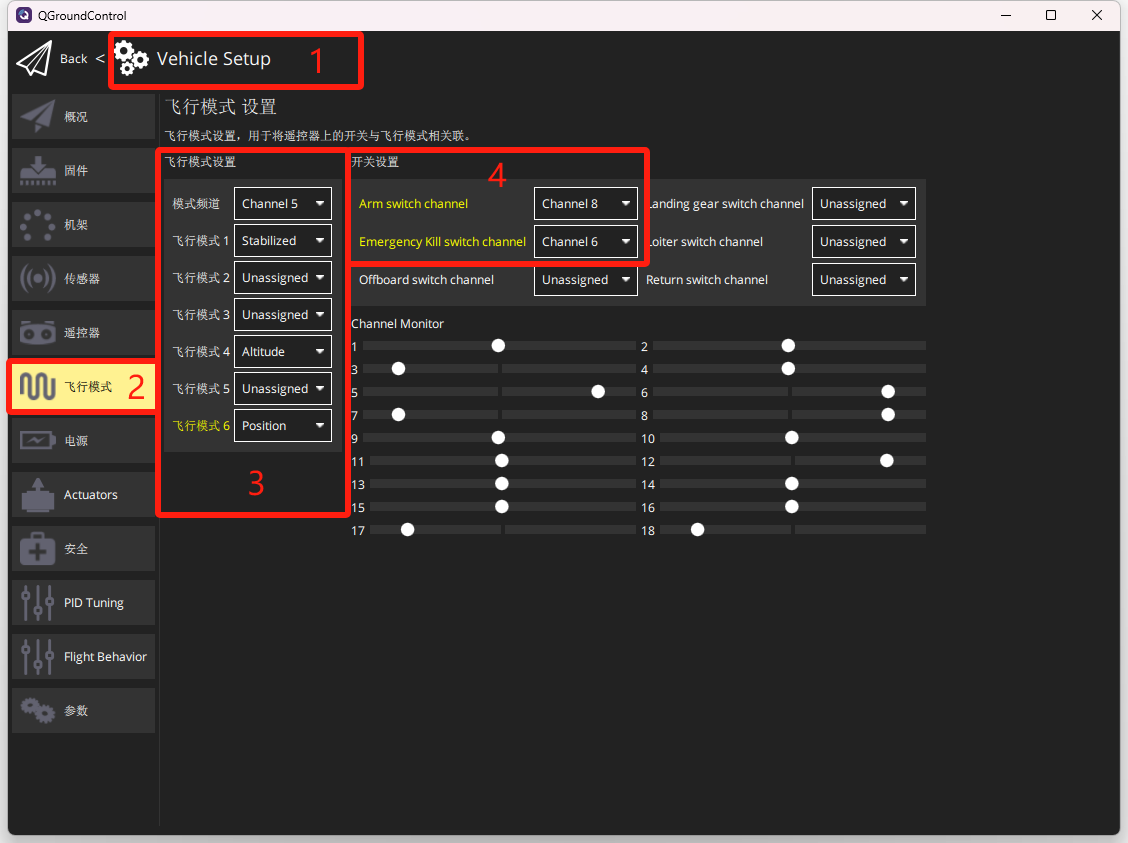
- QGroundControl -> Vehicle Setup -> 飞行模式 -> 飞行模式设置 -> 将 模式频道 设置为对应遥控器上通道(Channel 5);拨动该通道对应的拨杆开关,高亮部分显示该拨杆开关选中当前模式;设置拨杆开关不同位置对应的模式(通常设置三段式开关:飞行模式 1 - Stabilized;飞行模式 4 - Altitude;飞行模式 6 - Position)
-
设置通道功能
-
QGroundControl -> Vehicle Setup -> 飞行模式 -> 开关设置 -> 为 Arm switch channel 设置控制通道(Channel 8) -> 为 Emergency Kill switch channel 设置控制通道(Channel 6)
-
高亮表示该设置的功能已选中开启,Arm switch channel 为 解锁/上锁 开关;Emergency Kill switch channel 为紧急停止开关
-
注意 Arm switch channel 为 解锁/上锁 开关,设置过程避免触发导致无人机解锁,或先打开紧急停止开关后再验证该通道设置。PX4 支持摇杆 解锁/上锁 和通道 解锁/上锁 但不可并存,可根据个人操作习惯选择,本教程 PX4 固件 采用通道 解锁/上锁
-
-
立即生效
6.设置电源
-
设置电源
-
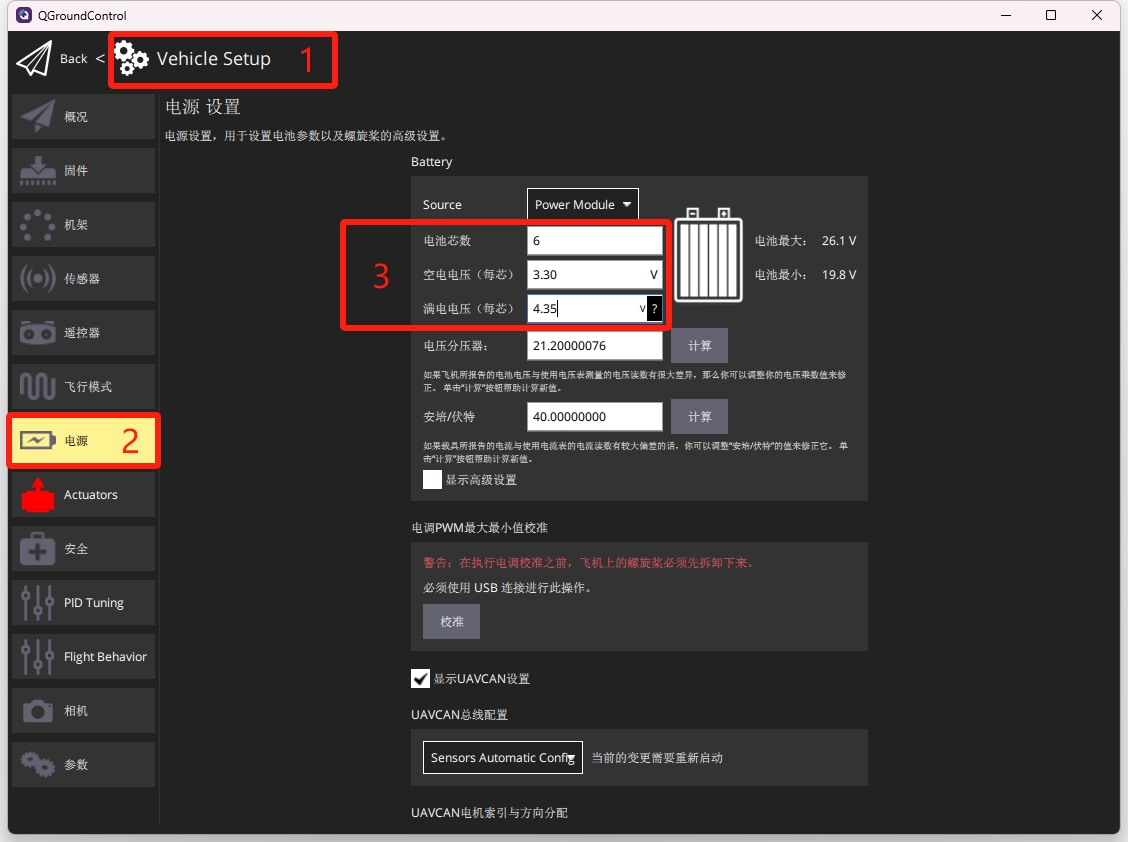
QGroundControl -> Vehicle Setup -> 电源
-
以《飞行平台搭建篇》中 MVD 飞行平台为例,设置 Source - Power Module; 电池芯数 - 6;空电电压(每芯) - 3.30V;满电电压(每芯) - 4.35v
-
-
立即生效
7.校准传感器
-
校准陀螺仪
-
将无人机水平静止放置
-
QGroundControl -> Vehicle Setup -> 传感器 -> 陀螺仪
-
点击 陀螺仪 即进行校准,该项校准比较简单,只是校准陀螺仪零偏,数秒内便会完成,完成后显示 校准完毕
-
-
校准加速度计
-
QGroundControl -> Vehicle Setup -> 传感器 -> 加速度计
-
弹出窗口选择飞控安装方向,(微空MVD35 飞行平台安装方向为默认安装方向:ROTATION_NONE,无需修改) -> Ok
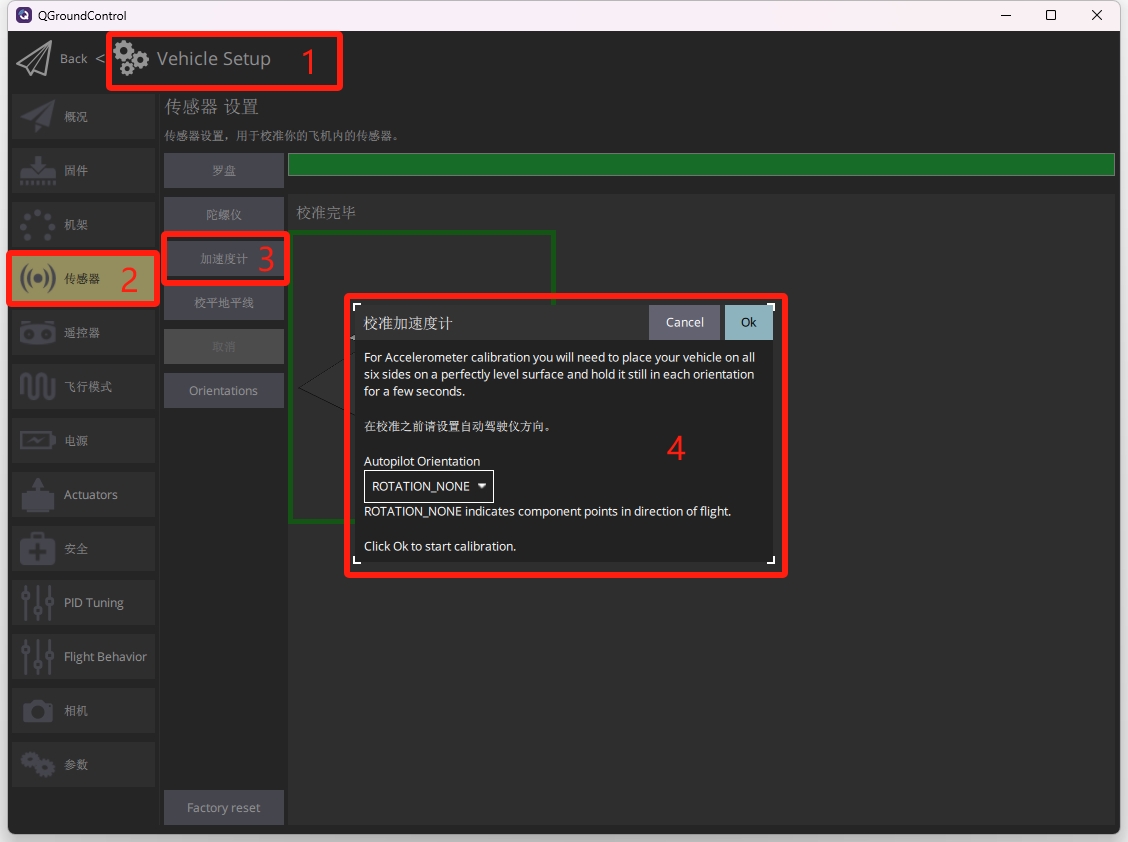
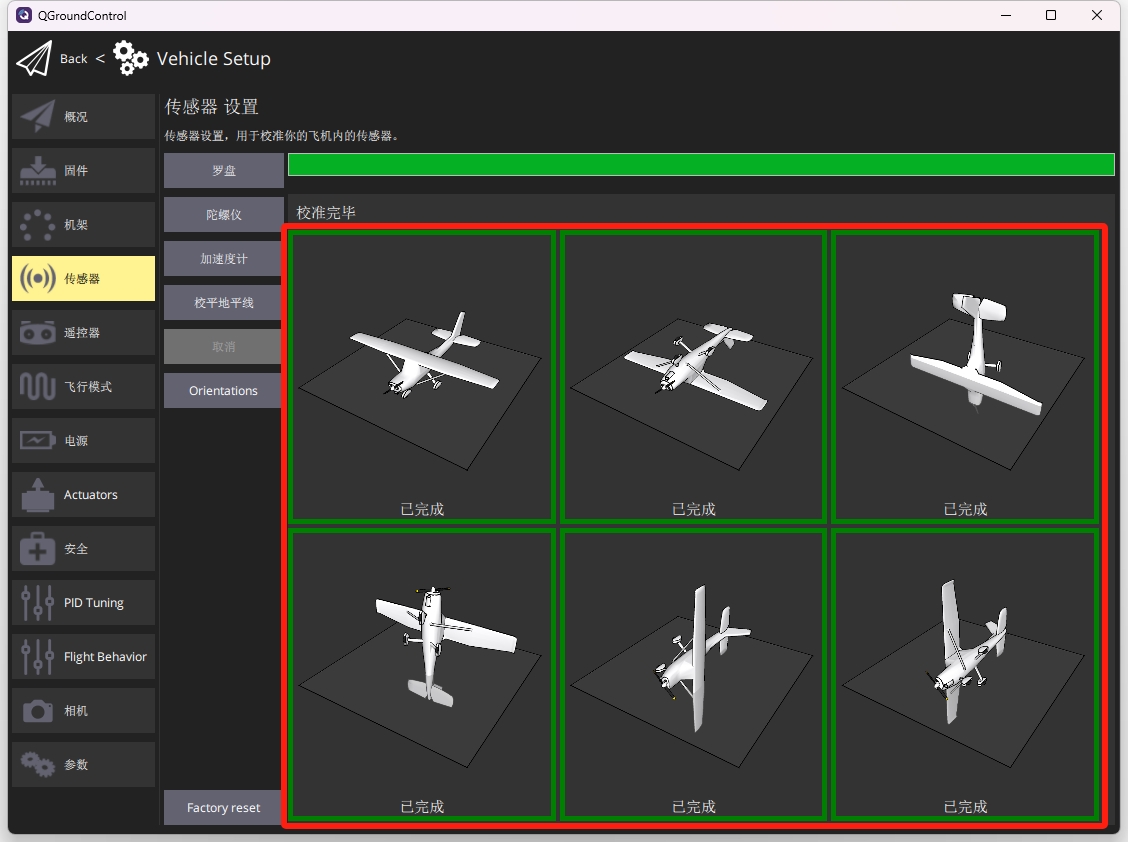
- 按照提示,保持无人机 6 种方向姿态(水平、倒置、机头朝地、机尾朝地、左侧朝地、右侧朝地),保持每种姿态一段时间,校准程序会识别该姿态并在完成该姿态的校准后示意图的方框由红色变为绿色,接着进行下一姿态的校准,全部校准完成后,上方显示 校准完毕
-
-
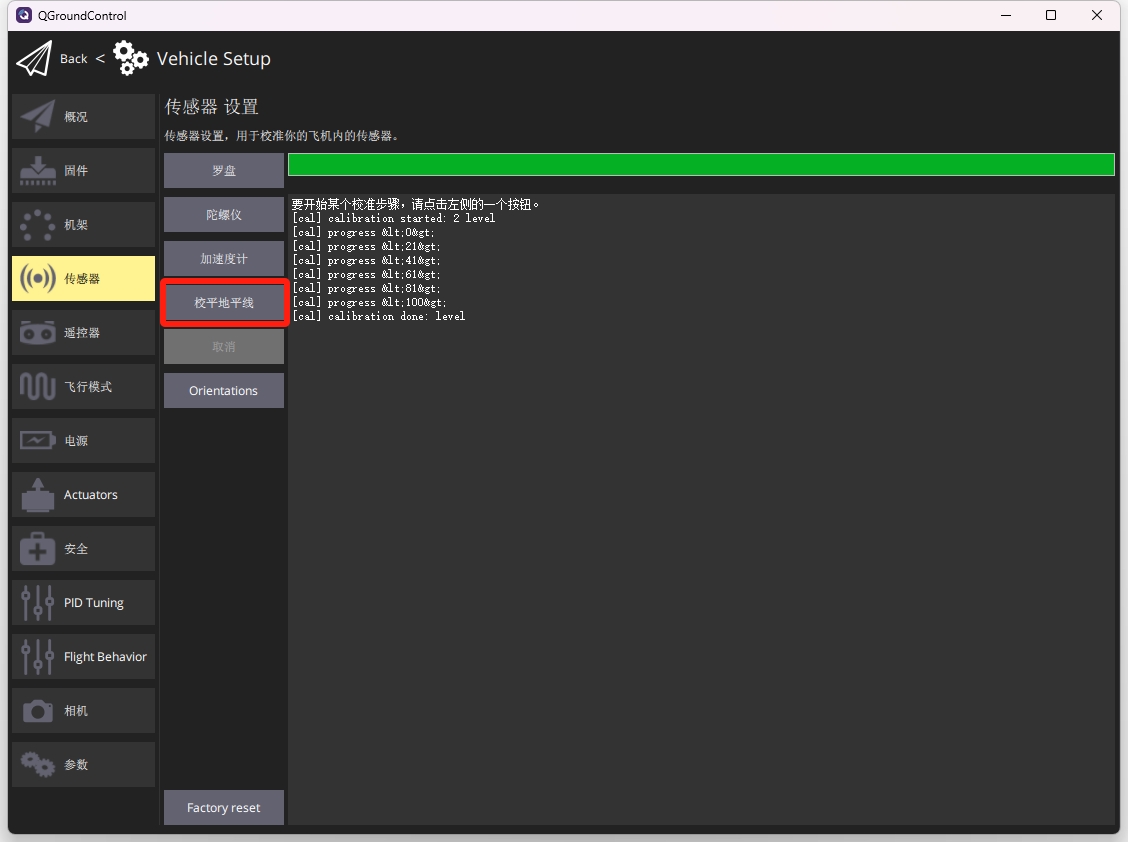
校准地平线
-
将无人机放置在水平地面上
-
点击 校平地平线 即进行校准,校准完成,右边显示 [cal] calibration done: level
-
-
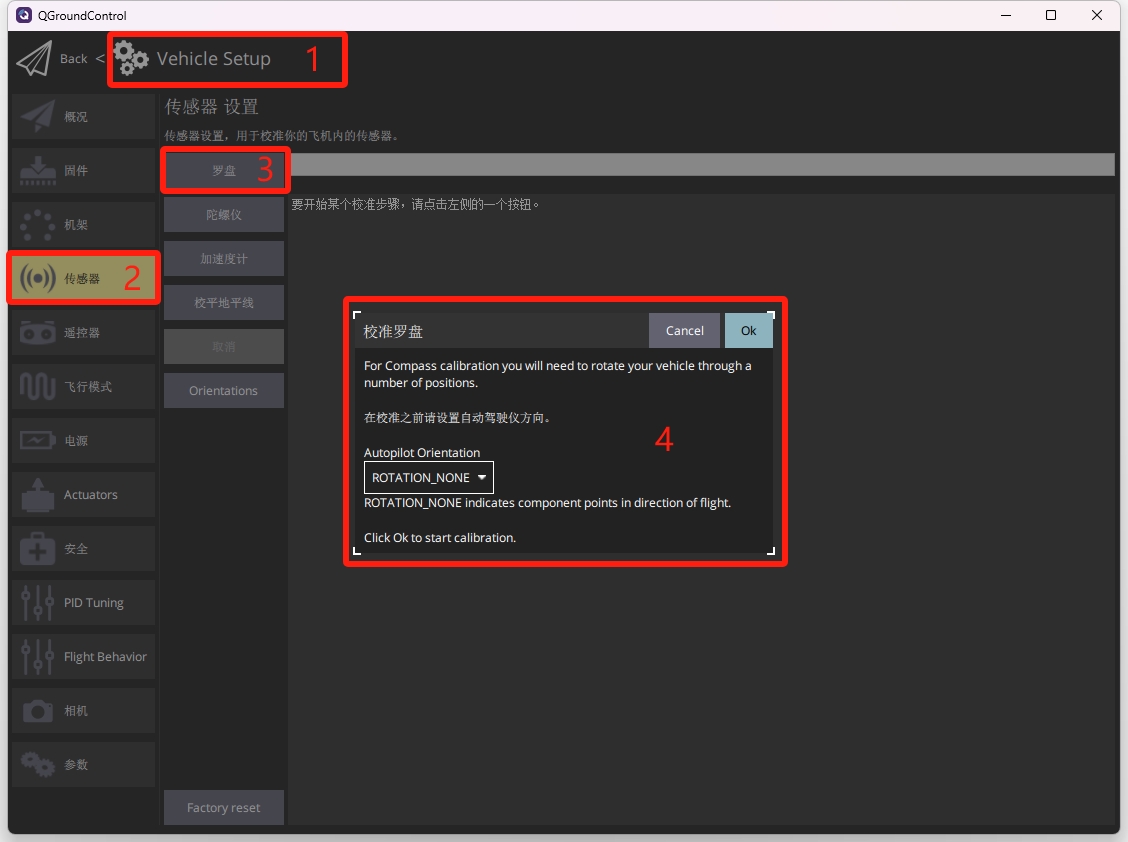
校准罗盘
-
QGroundControl -> Vehicle Setup -> 传感器 -> 罗盘
-
弹出窗口选择飞控安装方向,(微空MVD35 飞行平台安装方向为默认安装方向:ROTATION_NONE,无需修改) -> Ok
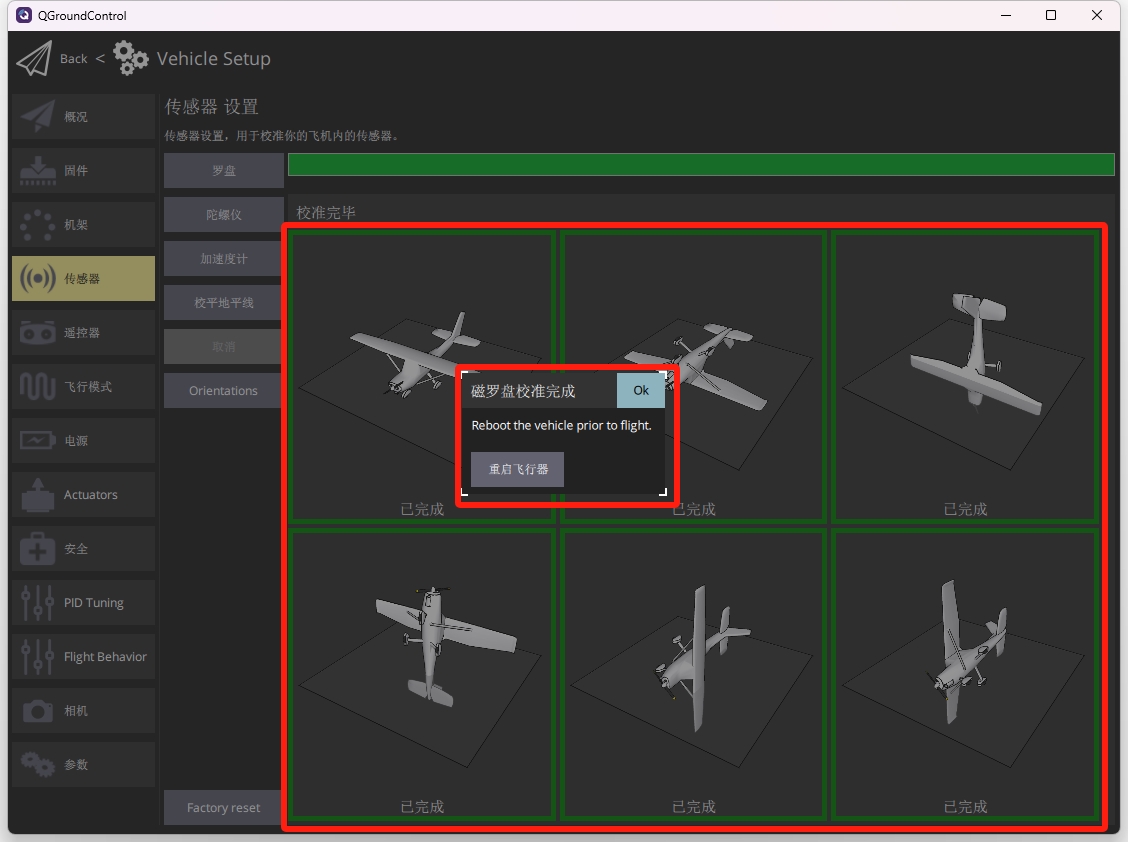
- 按照提示,保持无人机 6 种方向姿态并水平旋转一圈(水平、倒置、机头朝地、机尾朝地、左侧朝地、右侧朝地),保持每种姿态一段时间后,校准程序会识别该姿态并显示转圈提示,水平旋转一圈后示意图的方框由红色变为绿色,接着进行下一姿态的校准,全部校准完成后,弹窗提示 磁罗盘校准完成,点击 重启飞行器 使校准参数重启生效
-
-
重启生效
8.验证配置内容
-
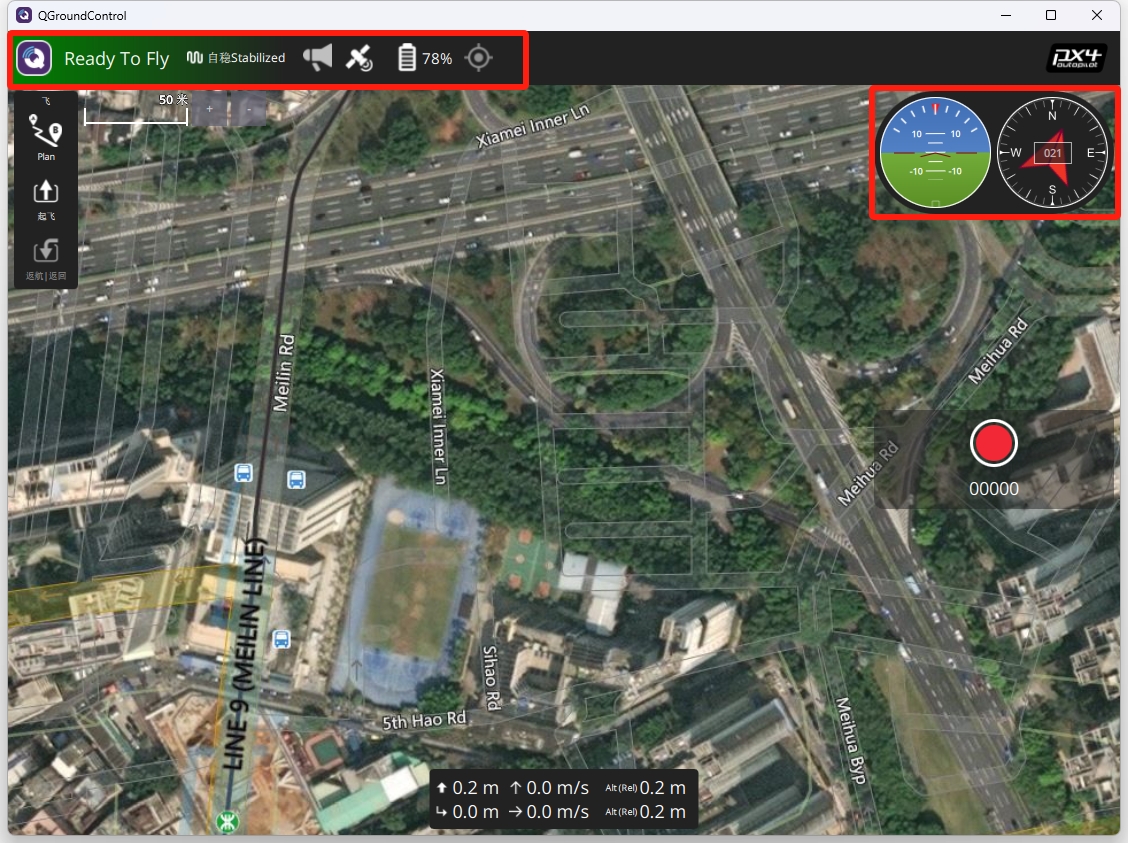
验证罗盘方向
- QGroundControl 主界面右上角罗盘图标指示无人机方向,验证无人机方向角度是否与实际朝向一致(可参考手机罗盘方向,角度偏差在 5° 以内即可),水平转动无人机,验证无人机方向角度随之变化并与实际朝向变化一致
-
验证水平姿态
- QGroundControl 主界面右上角姿态球显示无人机姿态,将无人机放置在地上或者水平时,验证地面站姿态窗口是否水平,改变无人机姿态,验证姿态球变化是否与实际第一人称视角变化相同
-
验证电池设置
- QGroundControl 主界面信息栏电池图标显示电池电量信息,点击该图标可显示电池电压、电量等详细信息
-
验证飞行模式
- QGroundControl 主界面信息栏显示飞行模式,遥控器切换飞行模式,查看当前飞行模式是否与设置一致;解锁条件满足,可进入该飞行模式会显示 Ready To Fly,未满足该飞行模式条件会显示 Not Ready,熟悉拨杆位置对应的飞行模式
9.测试飞行
-
打开遥控器
-
MVD35飞机上电
-
TRS 高频头连接到电脑
-
连接 QGroundControl,确认 QGroundControl 上数据状态(电池电量、飞行模式、无人机姿态、是否可解锁 Ready To Fly 等)
-
飞行测试
-
在空旷安全的场地进行飞行测试
-
首先练习自稳 Stabilized 飞行模式:确认无人机数据没有异常后,在 Stabilized 模式下解锁,轻推油门,使无人机离地,熟悉摇杆控制效果和该飞行模式
-
接着练习高度 Altitude 飞行模式:熟练掌握 Stabilized 飞行模式后,可以练习 Altitude 飞行模式,Altitude 飞行模式油门摇杆居中则保持高度保持状态,该模式下起飞需要将油门摇杆拉至中点以上,离地 30cm 以上后可以回中保持定高,避免地面效应导致高度发散
-
熟练掌握两种飞行模式后,可以练习在飞行状态中切换模式:飞行状态中切换模式时,需要注意油门摇杆的位置,避免窜天或急速下降
-
-
总结与改进
-
根据飞行测试过程中无人机的表现和操作习惯,调节 PID 、顺手的通道设置或其它设置
-
飞行完成后,可通过 QGroundControl 下载日志,并使用 PlotJuggler、Flight Review 等工具加载日志针对具体情况进行分析
-
其它拓展性设置根据实际飞行应用场景进行设置
-
PX4 基础飞行设置完成,后续内容请参考微空科技无人机视觉导航教程系列《机载电脑环境配置(树莓派4B+T265)》或《双目VIO算法实现与应用(树莓派5+D435i)》。
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)