微空MVD35双目视觉开源飞行平台用户手册

产品介绍
微空MVD35双目视觉开源飞行平台采用 3.5 寸圈机机架,轴距仅 152mm,小巧安全,狭窄室内空间也能轻松飞行,适合初学者开发学习使用。
平台搭载微空 H743 飞控,官方支持 Ardupilot 和 PX4-Autopilot 两大主流开源固件;配备树莓派机载电脑,运行 Ubuntu 操作系统和 ROS 工具,生态丰富,支持大量开源工具软件;采用英特尔 RealSense 双目相机感知飞行环境,实现室内精准自主导航。
安全稳定的飞行平台、全面详尽的资料说明和视频教程、二次开发的引导案例,为用户后续应用开发提供强大助力。
| 产品型号 | MVD35-树莓派4B-不含双目 | MVD35-树莓派4B-T265 | MVD35-树莓派5-不含双目 | MVD35-树莓派5-D435i |
|---|---|---|---|---|
| Ardupilot | √ | √ | √ | √ |
| PX4-Autopilot | √ | √ | √ | √ |
| 树莓派 4B | √ | √ | ||
| 树莓派 5 | √ | √ | ||
| T265 | √ | |||
| D435i | √ | |||
| OS | Ubuntu 20.04 | Ubuntu 20.04 | Ubuntu 24.04 | Ubuntu 24.04 |
| ROS | ROS 1 | ROS 1 | ROS 1/2 | ROS 1/2 |
| 总重量(含电池220g) | 645g | 645g | 670g | 670g |
| 续航 | 13min | 13min | 12min | 12min |
产品购买
使用说明
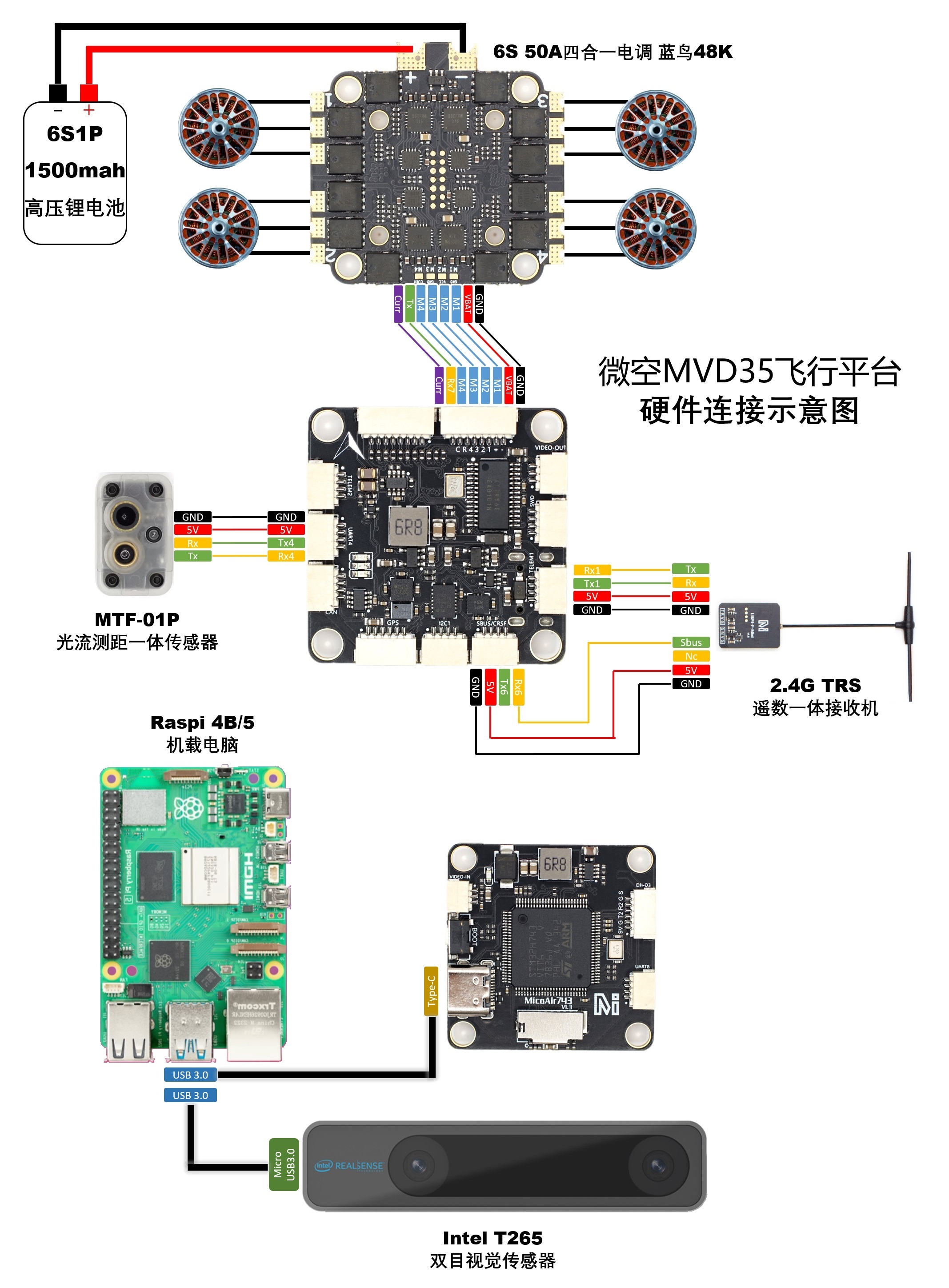
1. 硬件连接示意图
2. 遥控器通道定义说明
-
0 - 遥控器开关机按键:关机状态下,长按 3 秒启动遥控器;开机状态下,长按 3 秒关闭遥控器;启动中,按键为蓝色,启动成功后,按键为绿色,若启动后开关机按键为红色,表示摇杆或开关未处于初始状态,检查摇杆和开关,将其拨动回初始状态,开关机按键重新变为绿色;遥控器开关机按键为绿色状态时,TRS 高频头才会正常启动并接收遥控器信号
-
1 - 遥控器通道 1 Roll 摇杆:控制无人机翻滚角度
-
2 - 遥控器通道 2 Pitch 摇杆:控制无人机俯仰角度
-
3 - 遥控器通道 3 Throttle 摇杆:控制无人机油门输出
-
4 - 遥控器通道 4 Yaw 摇杆:控制无人机航向角度
-
5 - 遥控器通道 5 飞行模式切换三段开关:控制无人机飞行模式;打到最上方(图中所示位置)时,飞行模式对应自稳飞行模式Stabilize(Ardupilot) / Stabilized(PX4);打到中间位置时,飞行模式对应定高飞行模式 AltHold(Ardupilot) / Altitude(PX4);打到最下方位置时,飞行模式对应定点飞行模式 Loiter(Ardupilot) / Position(PX4)
-
6 - 遥控器通道 6:Ardupilot 与 PX4 对应功能不同。Ardupilot 为信号源切换三段开关:控制无人机融合信号源,打到最上方(图中所示位置)时,无人机融合 视觉传感器+测距仪 数据;打到中间位置时,无人机融合 光流传感器+测距仪+罗盘 数据;打到最下方位置时,未设置融合数据;PX4 为 Emergency Kill switch channel (紧急停止开关):打到最上方(图中所示位置)及中间位置时,不触发紧急停止,打到最下方位置时,触发紧急停止,电机停止转动,在一些紧急状况下可以使用,强制使飞机坠机。
-
7 - 遥控器通道 7:遥控器两段自锁按键,功能未定义,可自由使用
-
8 - 遥控器通道 8 解锁/上锁两段自锁按键:控制无人机通道解锁与上锁;按下自锁时,按键发绿光,无人机解锁;按下弹起时,按键绿光熄灭,无人机上锁

3. TRS 遥数一体状态说明
-
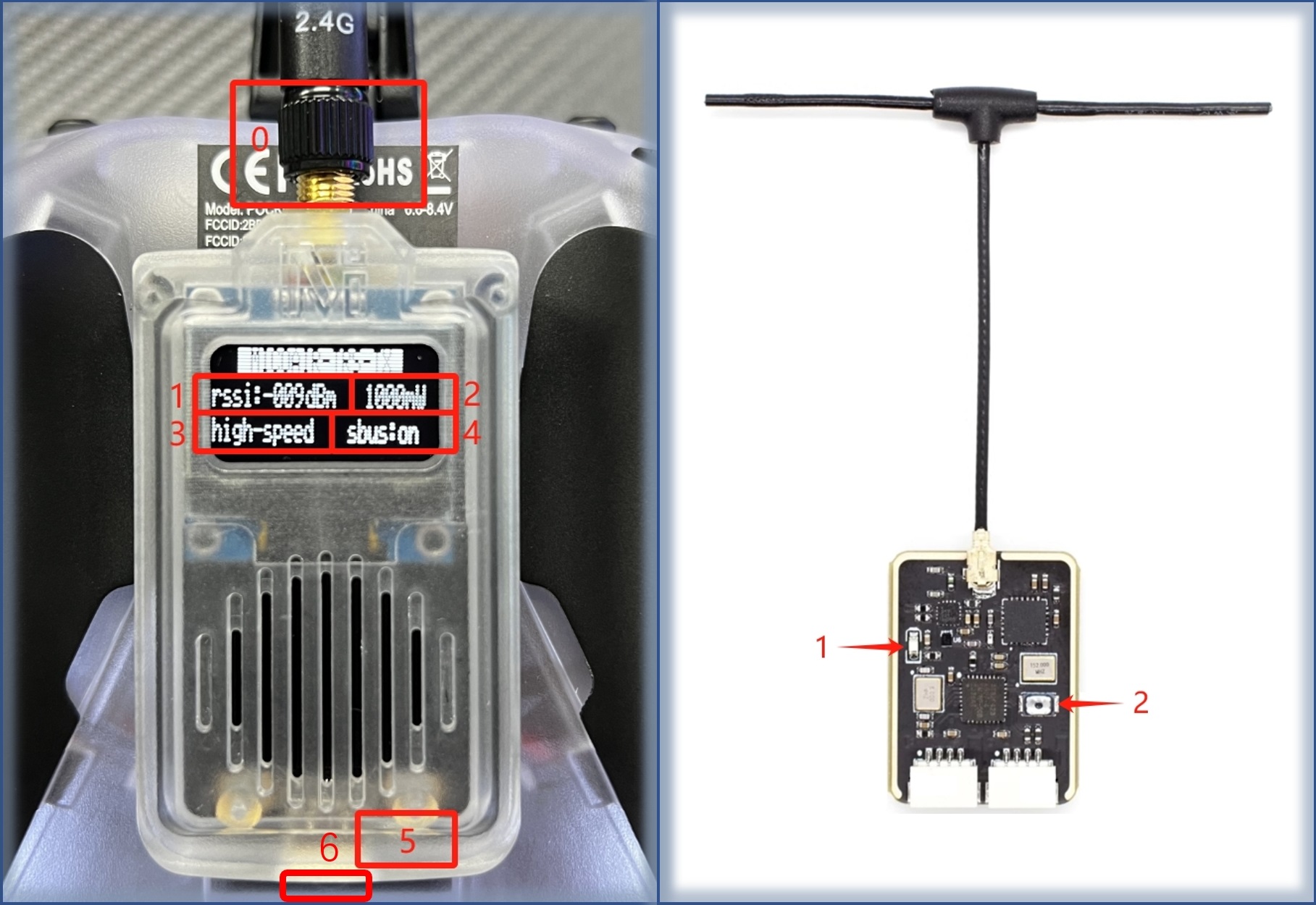
0 - 高频头天线,使用前,将遥控器配套天线拧紧到 SMA 接头上
-
1 - 接收信号强度
-
2 - 发射功率
-
3 - 通信模式:standard 模式通信带宽为 4Kb/s;long-range 模式通信带宽为 2.4Kb/s;high-speed 模式通信带宽为 8Kb/s;在 MVD35 飞行平台中,应使用 high-speed 模式
-
4 - sbus 信号:on 表示高频头接收到遥控器 sbus 信号;off 表示未接收到遥控器 sbus 信号
-
5 - 蓝牙连接指示灯:蓝灯长亮表示高频头蓝牙已连接;蓝灯熄灭表示高频头蓝牙未连接
-
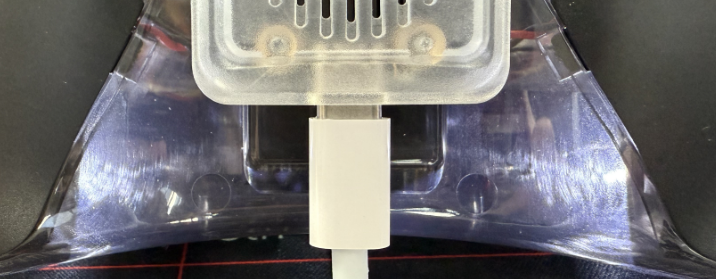
6 - Type-C 接口:用于将高频头连接到电脑,实现无人机与地面站的通信
-
1 - TRS 接收机指示灯:绿灯长亮为已连接;绿灯慢闪为未连接;绿灯快闪为对频中;绿灯双闪为已连接,但无 Sbus 信号
-
2 - TRS 接收机对频按键:按住按键同时给接收机上电后松开按键,接收机进入搜索对频模式(绿灯快闪)
4. 软硬件准备
1.软件安装:下载并安装 Mission Planner(Ardupilot 地面站),QGroundControl(PX4地面站)
2.硬件准备:电脑;电池(6S1P 1500mah XT60 高压版锂电池);Type - C 数据线
3.硬件装配:将电池穿过电池绑带稳固固定到电源板上方;将遥控器配套天线拧紧到 TRS 高频头 SMA 接头上
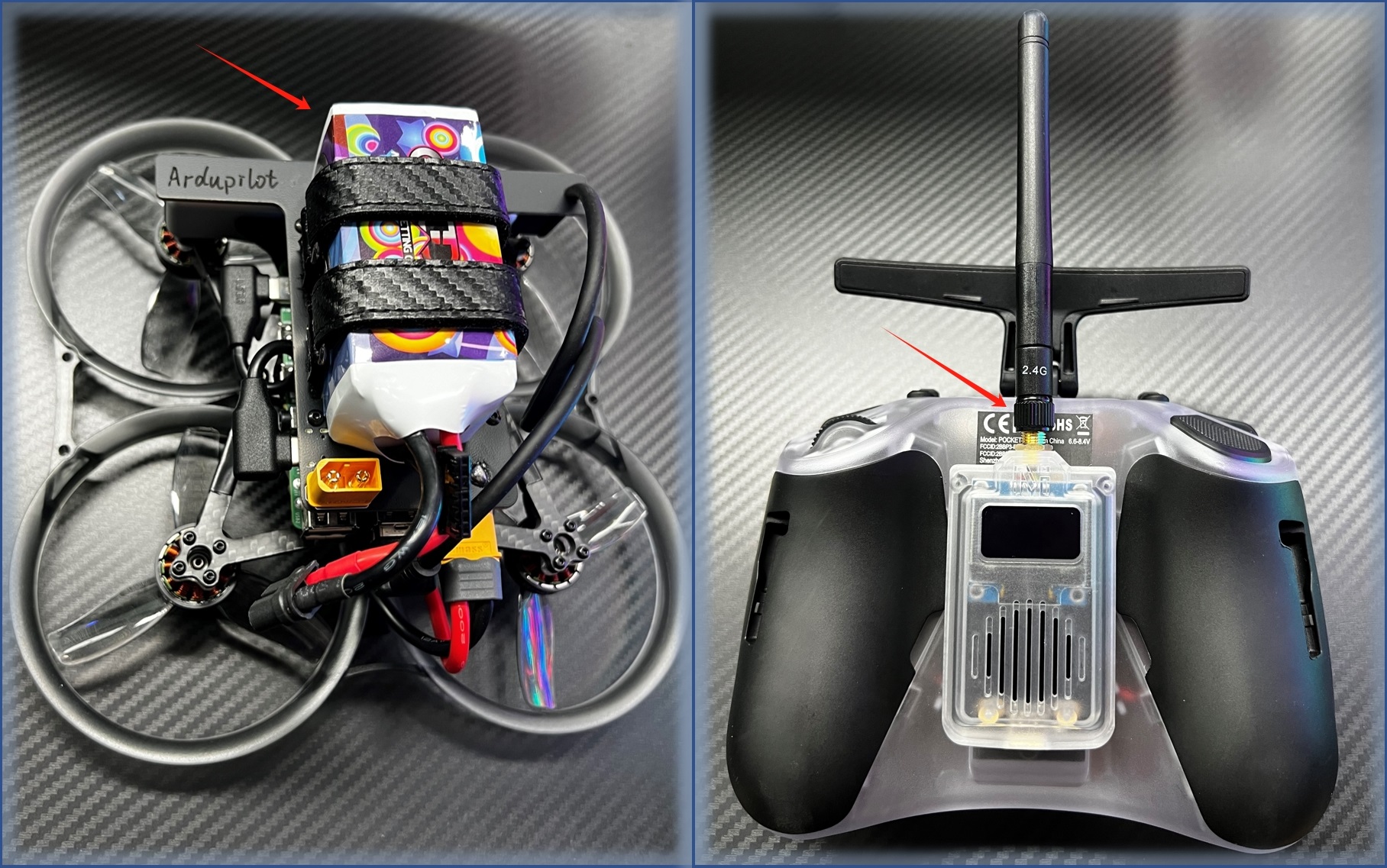
5. 上电启动
1.启动遥控器:长按遥控器中间开机键 3 秒启动遥控器,开机键由蓝色变绿色(若启动后开机键为红色,表示摇杆或开关未处于初始状态,检查摇杆和开关,将其拨动回初始状态,开机键重新变为绿色)
2.启动无人机:将电池 XT60 接头插入电源板,可以听到两次电机上电响声
3.检查 MVD35 飞行平台状态:此时遥控器上 TRS 高频头状态信息正常(rssi 信号强度在正常范围内,功率为 1000mW,传输模式为 high-speed,sbus 信号 on);无人机稳压板蓝色指示灯长亮,树莓派红色启动指示灯长亮;无人机底部 TRS 接收机绿色指示灯长亮,MTF-01P 蓝色指示灯长亮

飞行检查(Ardupilot)
1. 连接 Mission Planner 地面站
1.上电启动后,使用 Type - C 数据线连接遥控器 TRS 高频头与电脑
2.打开 Mission Planner -> 右上角选择 TRS 高频头端口 -> 波特率选择 115200 -> 连接
3.软件界面显示 正在获取参数 1,加载参数完成后,软件界面刷新并显示无人机信息,则无人机已连接地面站

2. 检查 TRS 遥控器通道数据
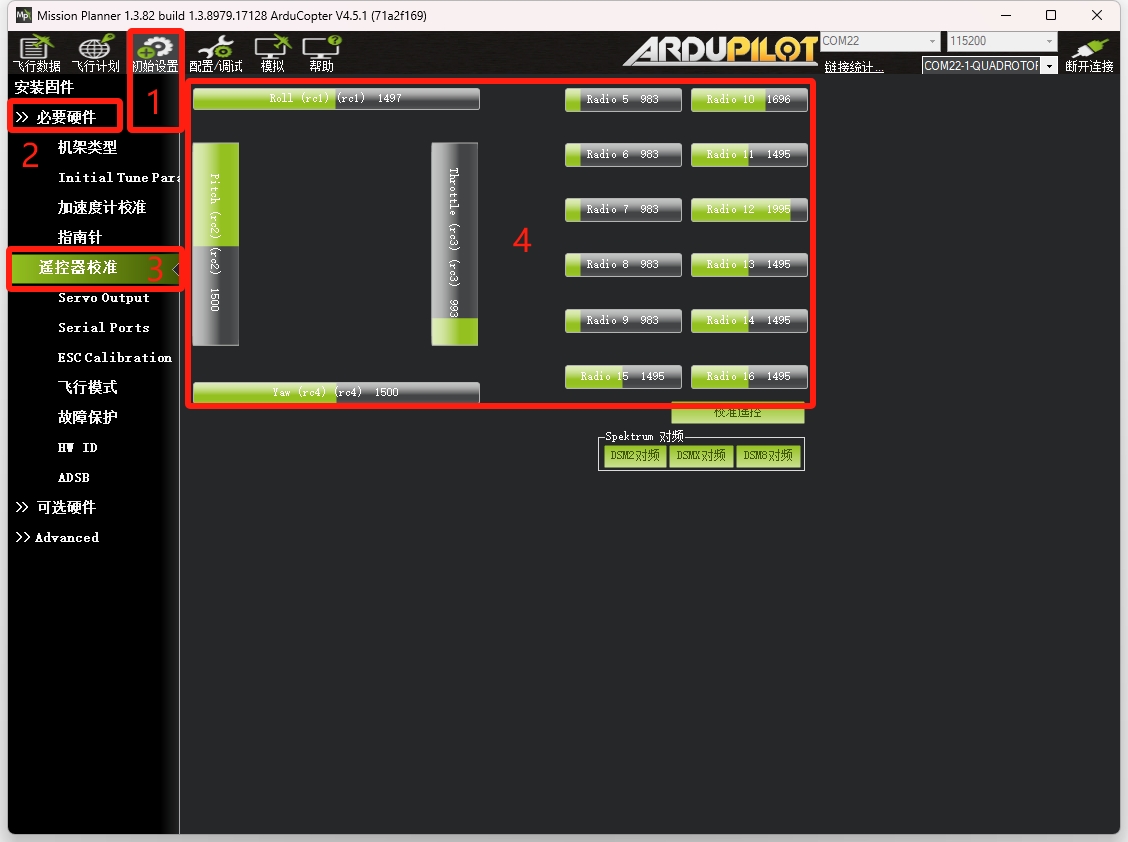
1.Mission Planner -> 初始设置 -> >> 必要硬件 -> 遥控器校准
2.遥控器校准 页面实时显示通道状态,移动摇杆、拨动拨杆开关或按下按键,测试遥控器上摇杆、拨杆开关和按键对应的通道(注意不要触发解锁)
3.PITCH (rc2)通道应显示为反向,确认各个通道默认位置和对应输出(RC1 - Roll, RC2 - Pitch, RC4 - Yaw 默认为中间值 1500 左右;其它通道对应默认值为低值 1000 左右)
3. 检查 MTF-01P 光流测距一体传感器数据
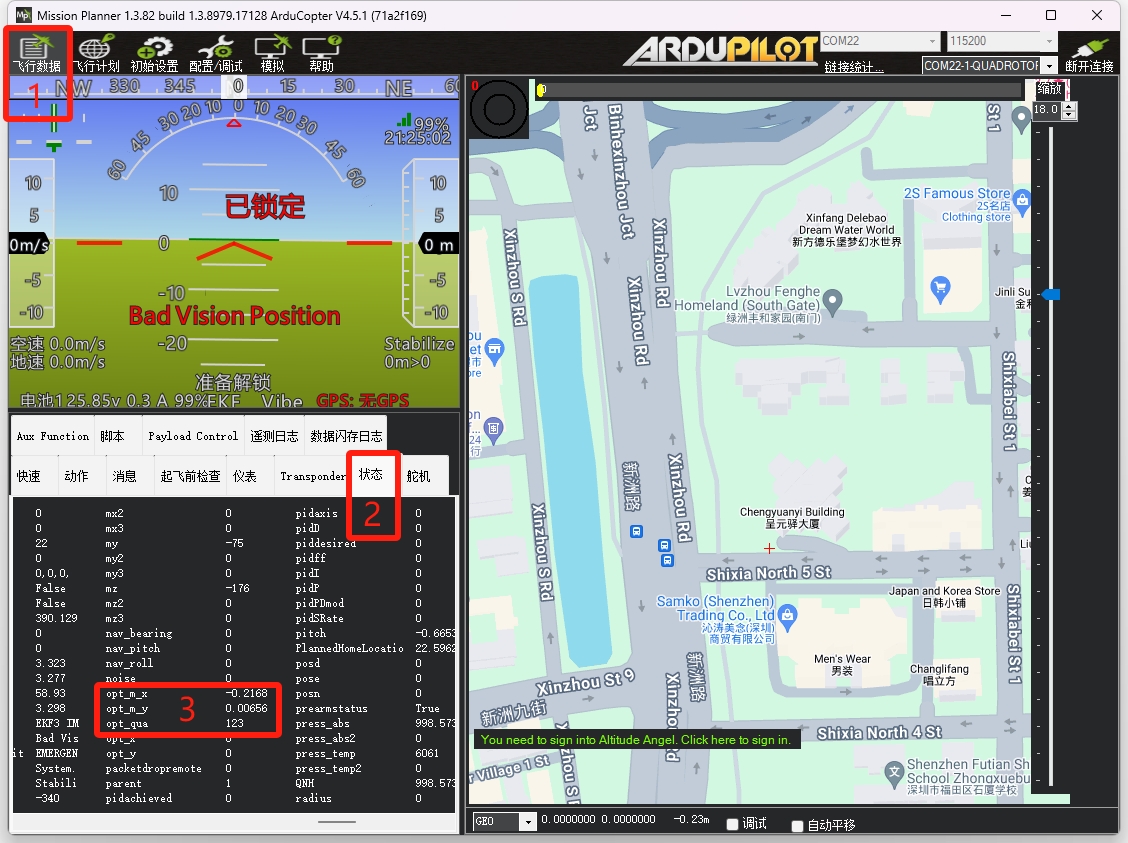
1.Mission Planner -> 飞行数据 -> 状态
2.查找关于光流数据 opt_m_x、opt_m_y、opt_qua;测距仪数据 rangefinder1
3.移动无人机,观察数据变化,rangefinder1 数据为无人机底部到地面或遮挡物间的距离,单位为 CM,检查测量结果与实际距离大致相同
4. 检查 T265 视觉传感器数据
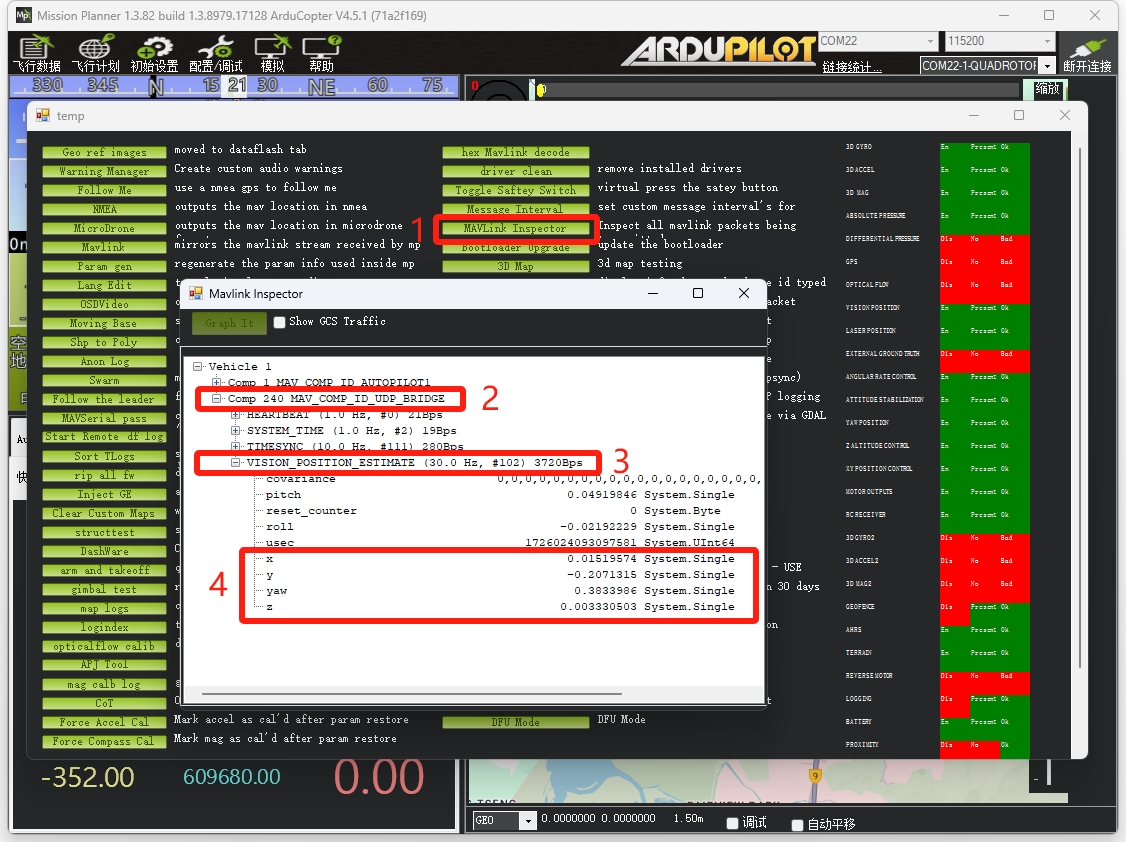
1.Mission Planner -> Ctrl+F -> 弹出 temp 窗口 -> MAVLink Inspector -> 弹出 MAVLink Inspector 窗口
2.Comp 240 MAV_COMP_ID_UDP_BRIDGE(树莓派发送的数据) -> VISION_POSITION_ESTIMATE(视觉传感器数据)
3.确认 VISION_POSITION_ESTIMATE 数据频率能达到 30Hz 左右,否则可能是数传传输带宽不足
4.移动无人机,观察以无人机 NED 坐标系的位置数据变化是否正确
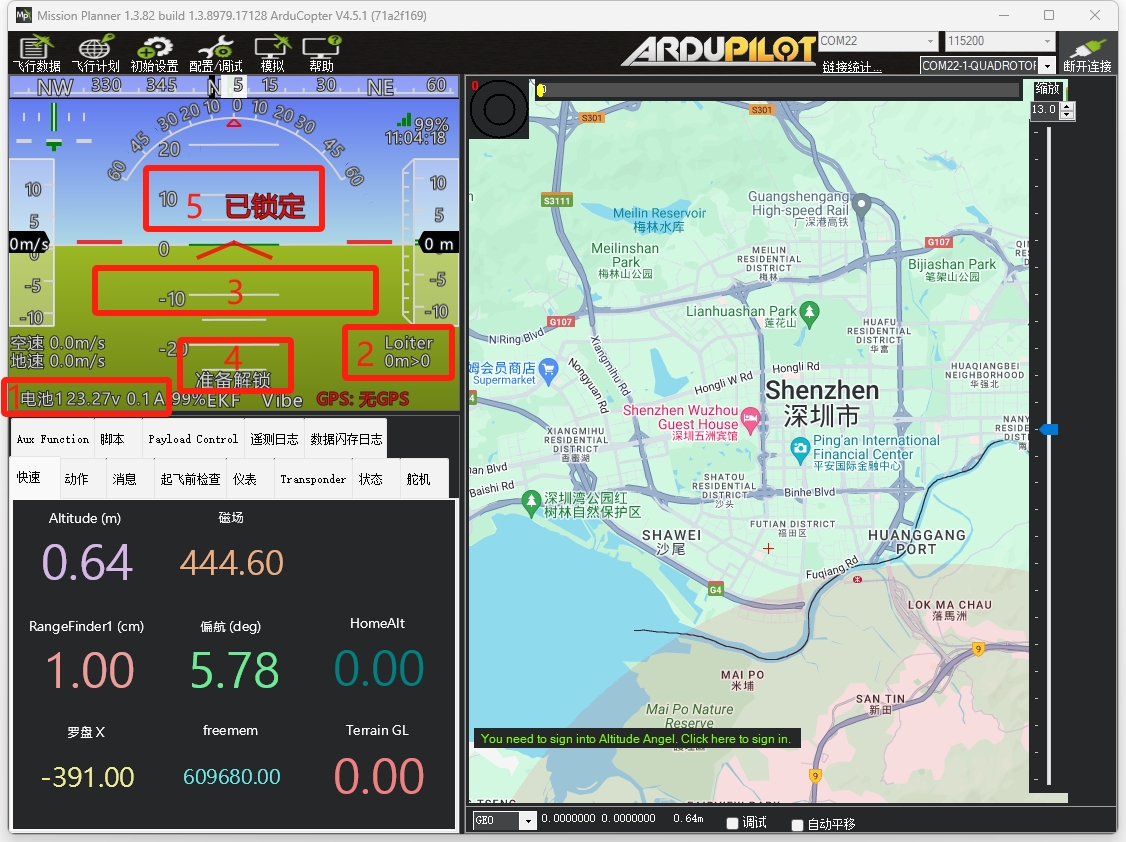
5. 确认无人机状态
1.电池电压电流:电池电压需在 20V 以上,接近或低于 20V 则需要充电;准备飞行需确保电池电量充足
2.飞行模式:显示选中的飞行模式,飞行模式可由遥控器通道 5 开关切换
3.错误信息显示位置:显示无法进入该模式或无法解锁的信息;飞行前需确保没有错误信息
4.是否可进入选定模式并解锁
5.解锁/上锁状态
飞行检查(PX4)
1.连接 QGroundControl 地面站
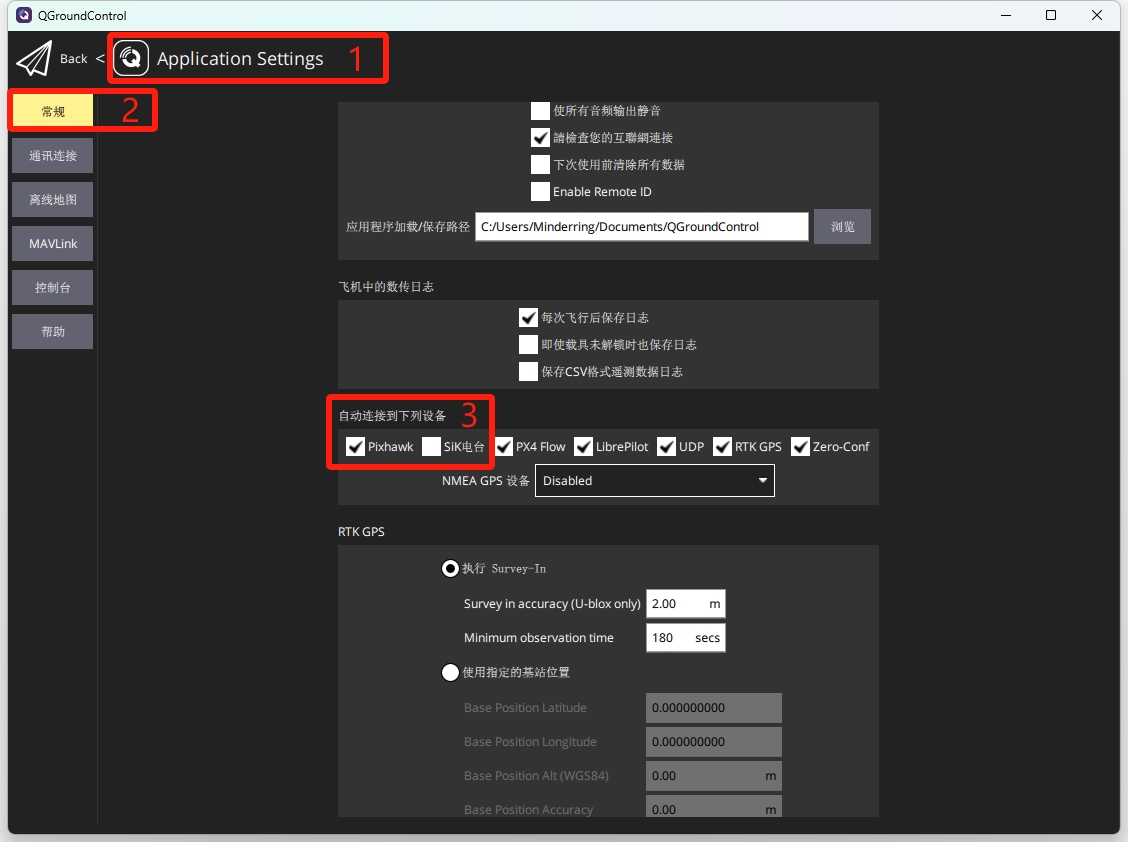
1.设置自动连接选项
- QGroundControl -> Application Settings -> 常规 -> 自动连接到下列设备 取消勾选 SiK电台
2.TRS 接入电脑
- 上电启动后,使用 Type - C 数据线连接遥控器 TRS 高频头与电脑
3.TRS 连接 QGroundControl
-
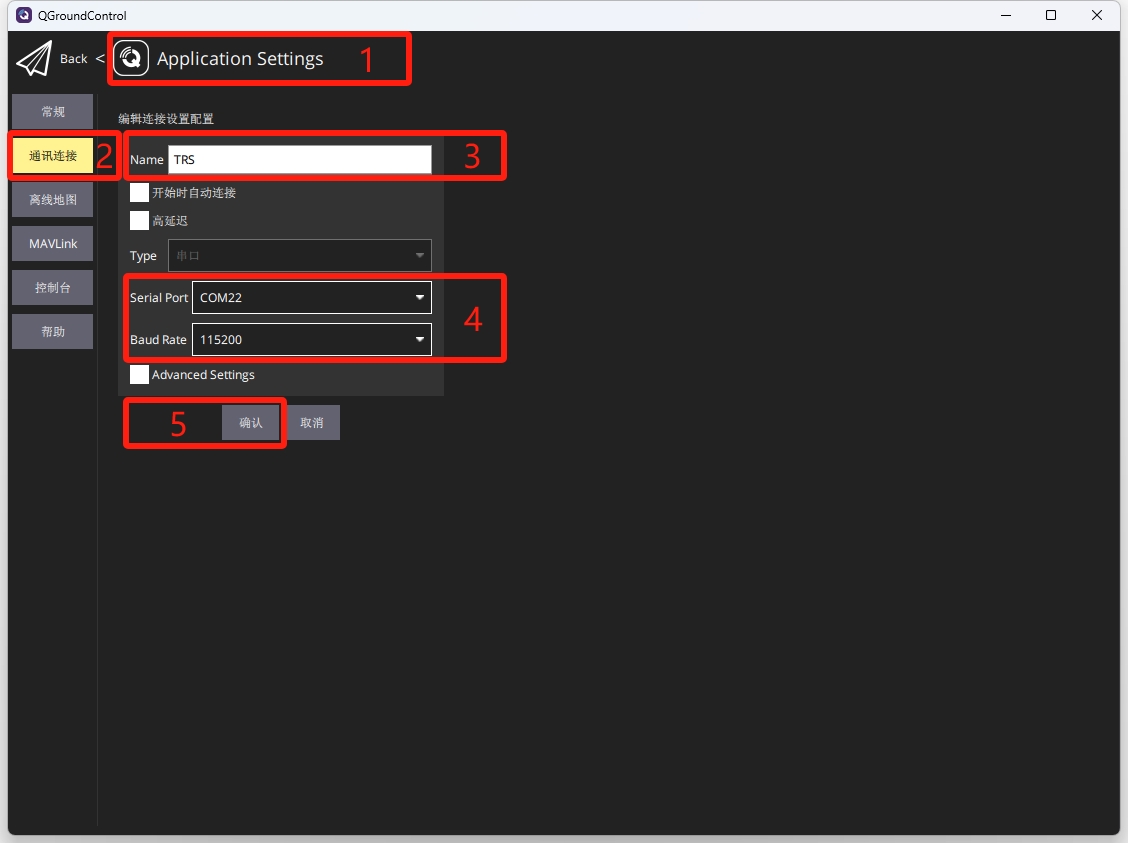
QGroundControl -> Application Settings -> 通讯连接 -> 添加
-
在 编辑连接设置配置 -> 填入 Name (以 TRS 为例) -> 选择 TRS 对应 Serial Port -> Baud Rate 选择 115200 -> 确认
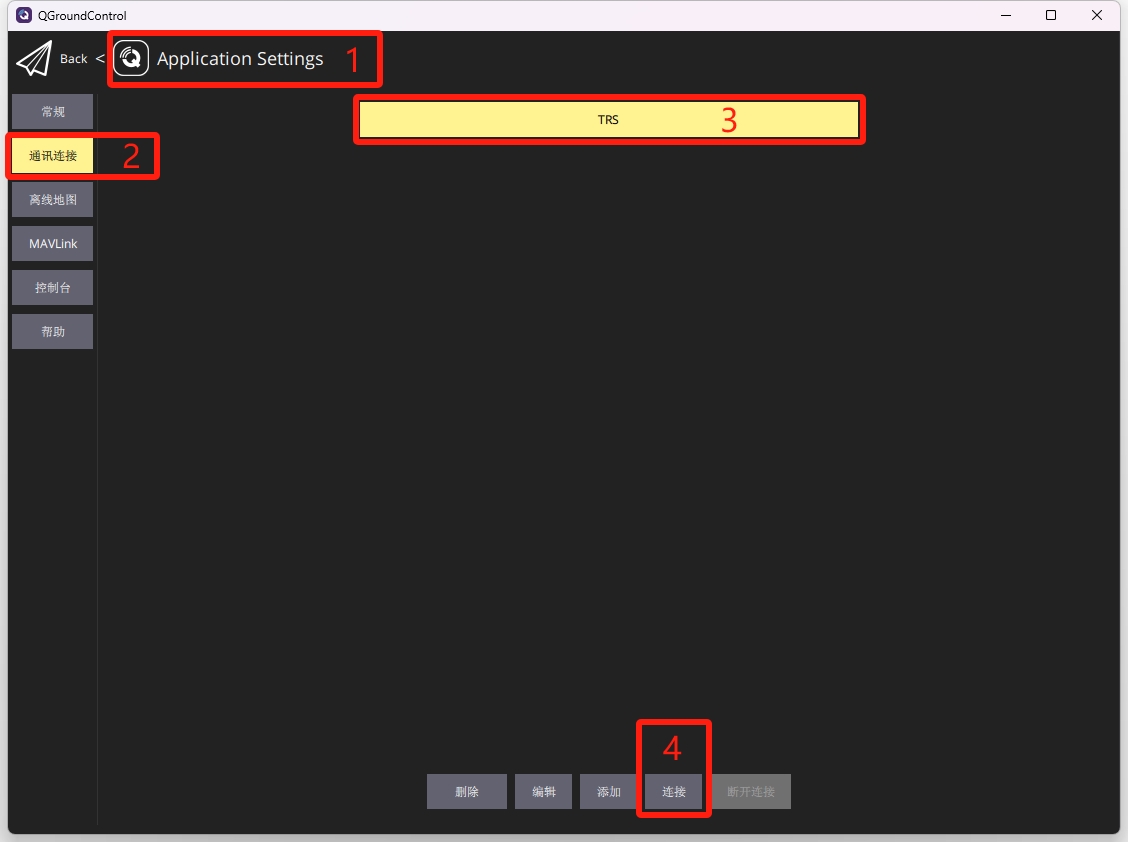
- QGroundControl -> Application Settings -> 通讯连接 -> TRS -> 连接
4.确认连接状态
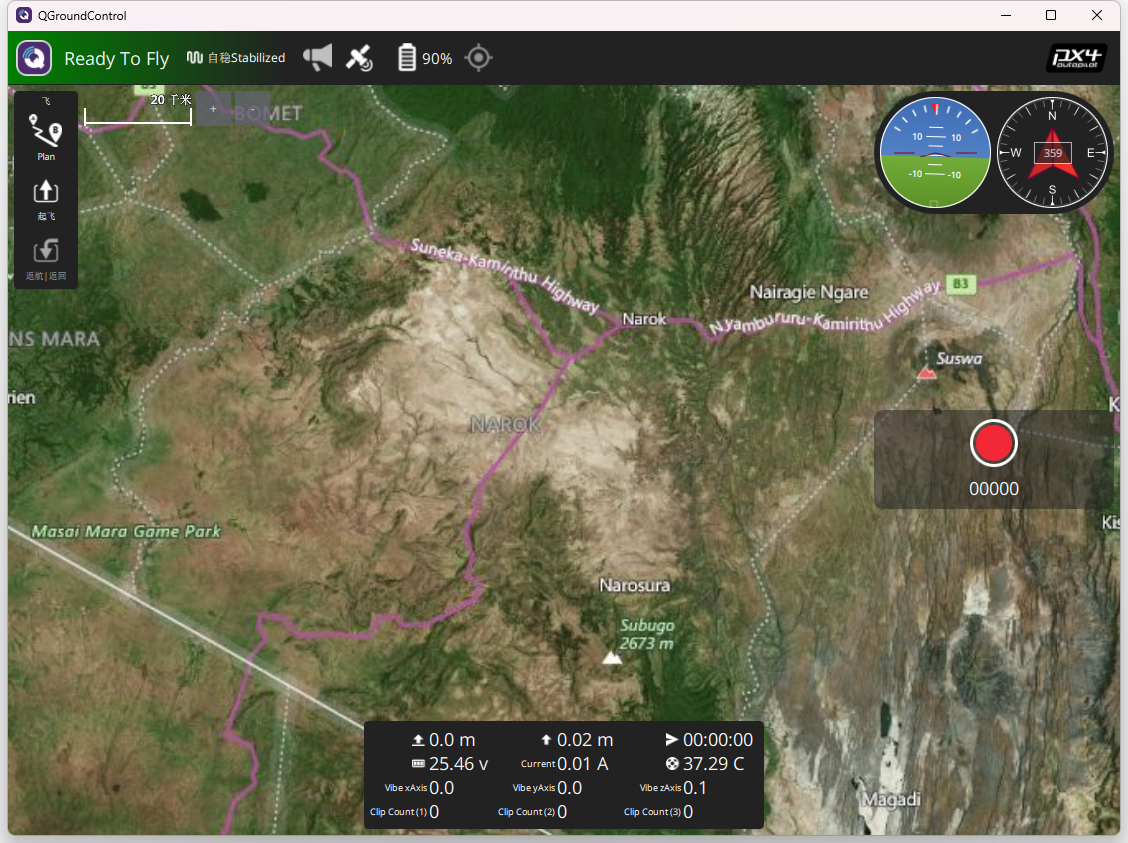
- QGroundControl -> Back 回到主界面,界面显示无人机状态
- 无线连接时,重启无人机后需要重新手动连接:QGroundControl -> Application Settings -> 通讯连接 -> TRS -> 连接
2.检查 TRS 遥控器通道数据
-
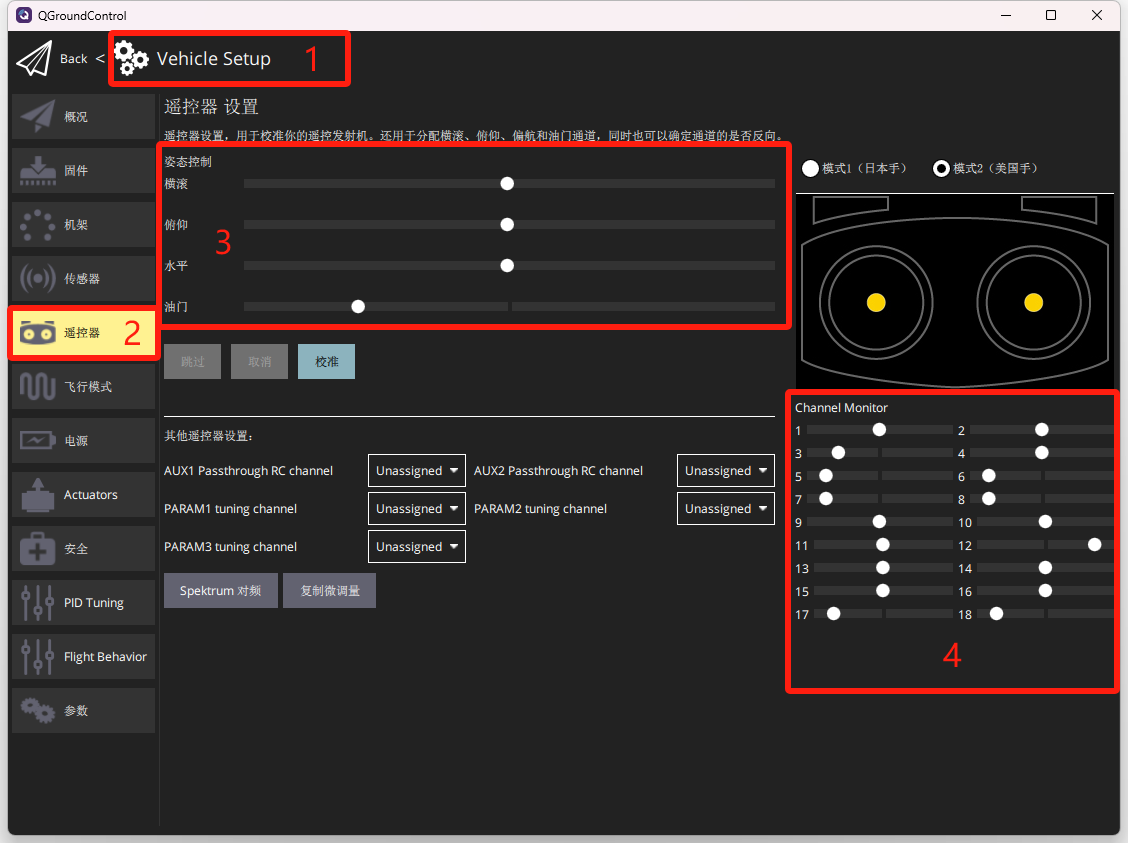
QGroundControl -> Vehicle Setup -> >> 遥控器
-
遥控器 页面实时显示通道状态,移动摇杆、拨动拨杆开关或按下按键,测试遥控器上摇杆、拨杆开关和按键对应的通道(注意不要触发解锁)
3.检查测距仪数据
-
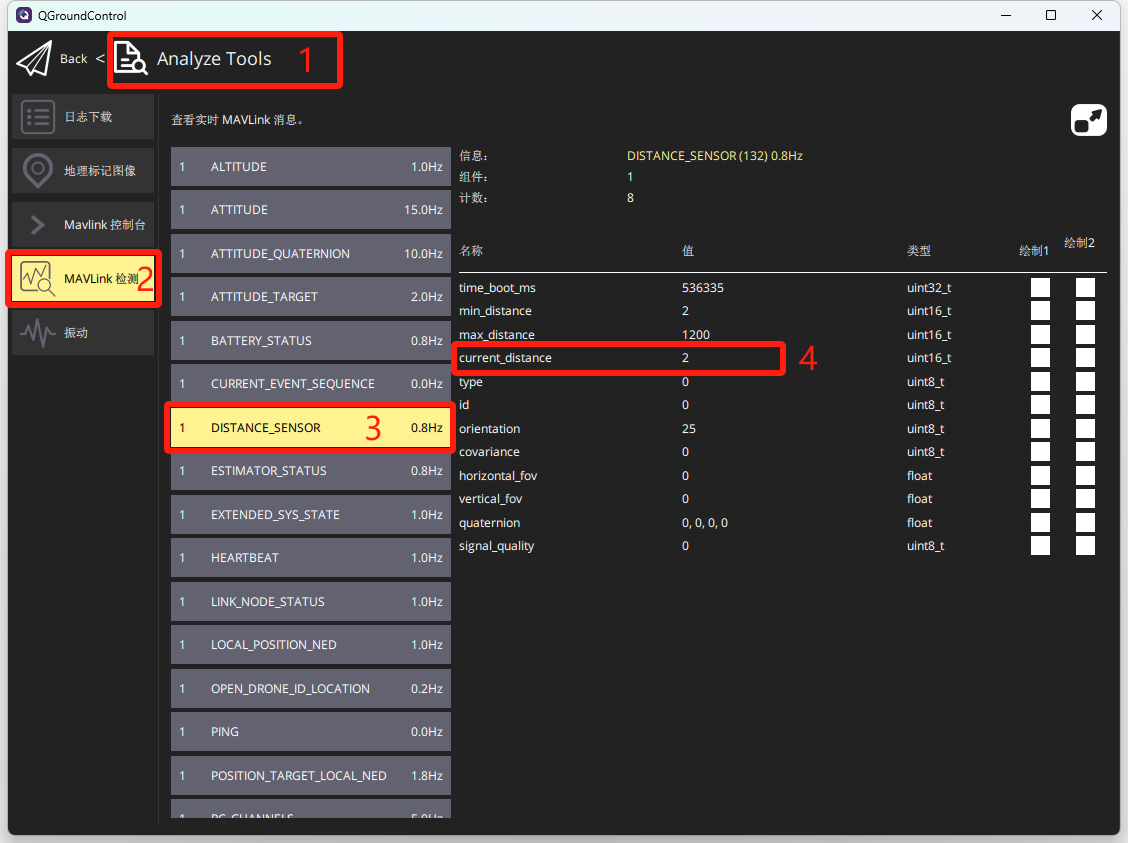
QGroundControl -> Analyze Tools -> MAVLink 检测 -> DISTANCE_SENSOR -> current_distance
-
垂直方向移动无人机,观察数据变化是否正确(单位:厘米)
-
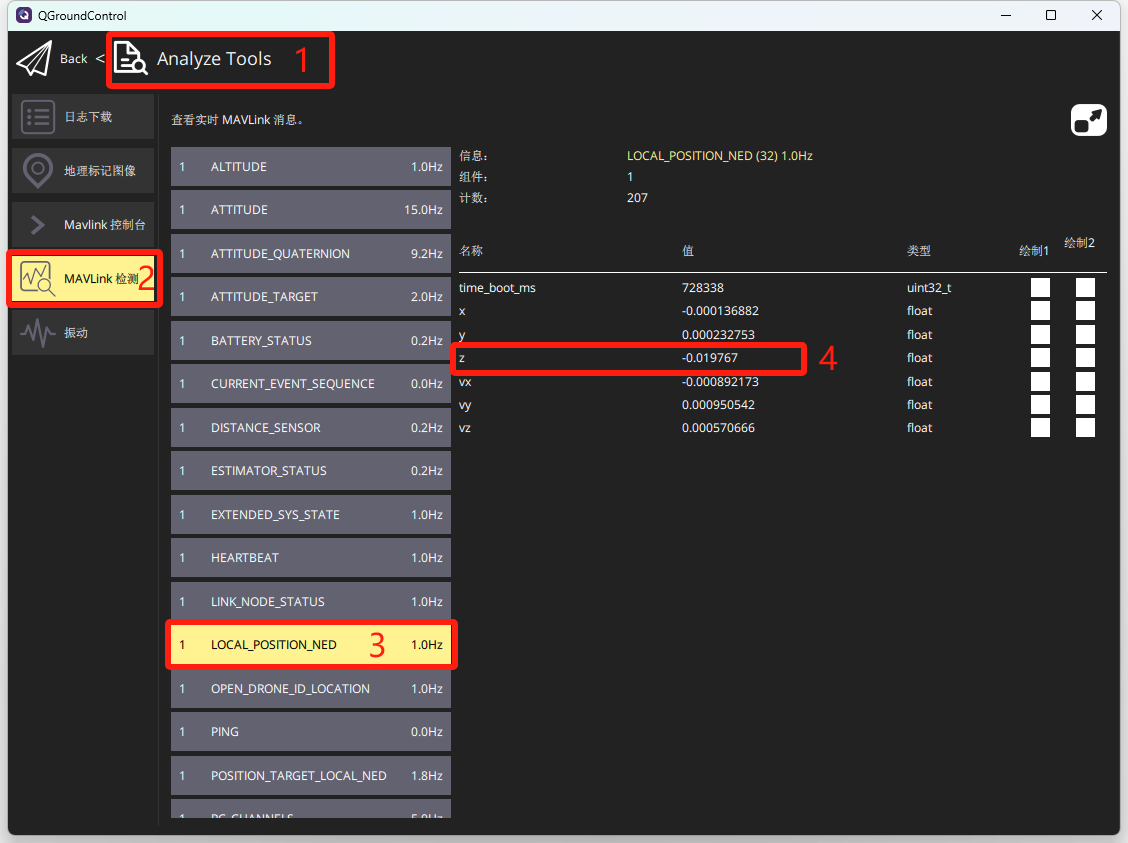
QGroundControl -> Analyze Tools -> MAVLink 检测 -> LOCAL_POSITION_NED -> z
-
垂直方向移动无人机,观察数据变化是否正确
-
z 数据应为负数(单位:米),且近似 DISTANCE_SENSOR -> current_distance 的负值,则表示当前高度仅融合测距仪数据
4.检查 T265 视觉传感器数据
-
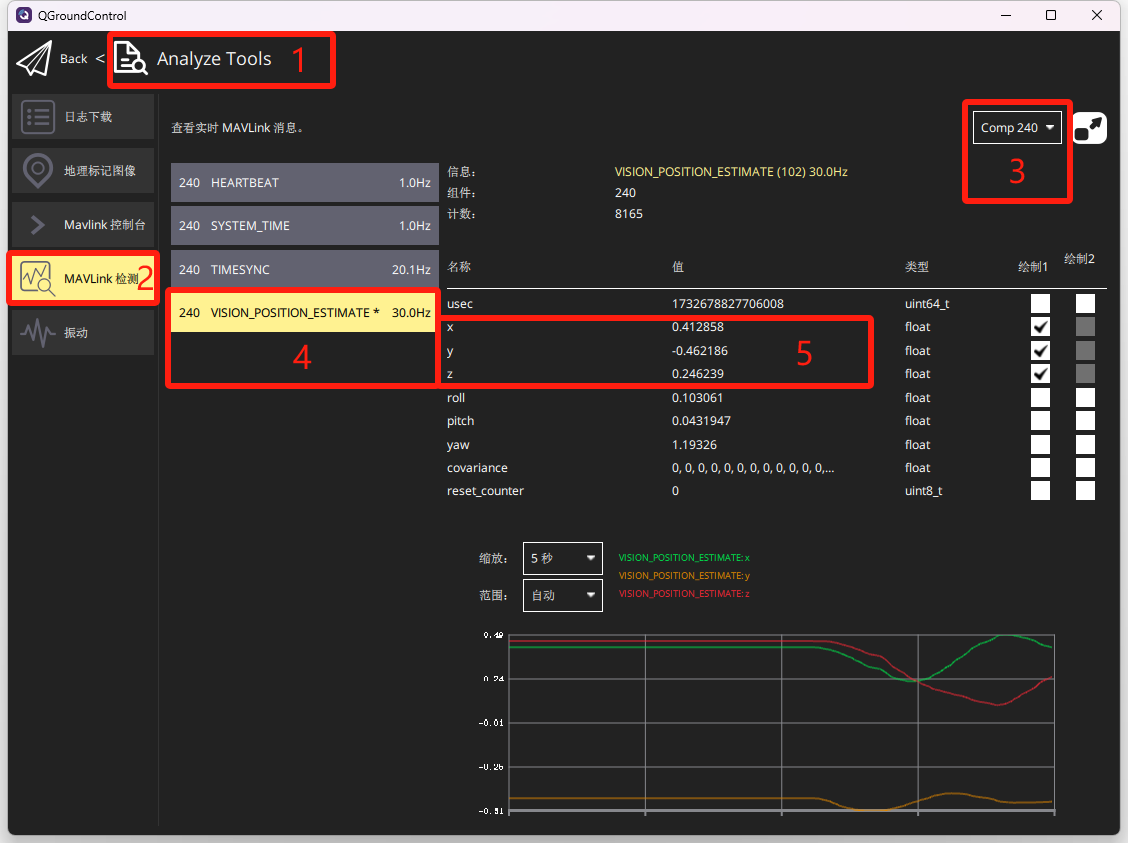
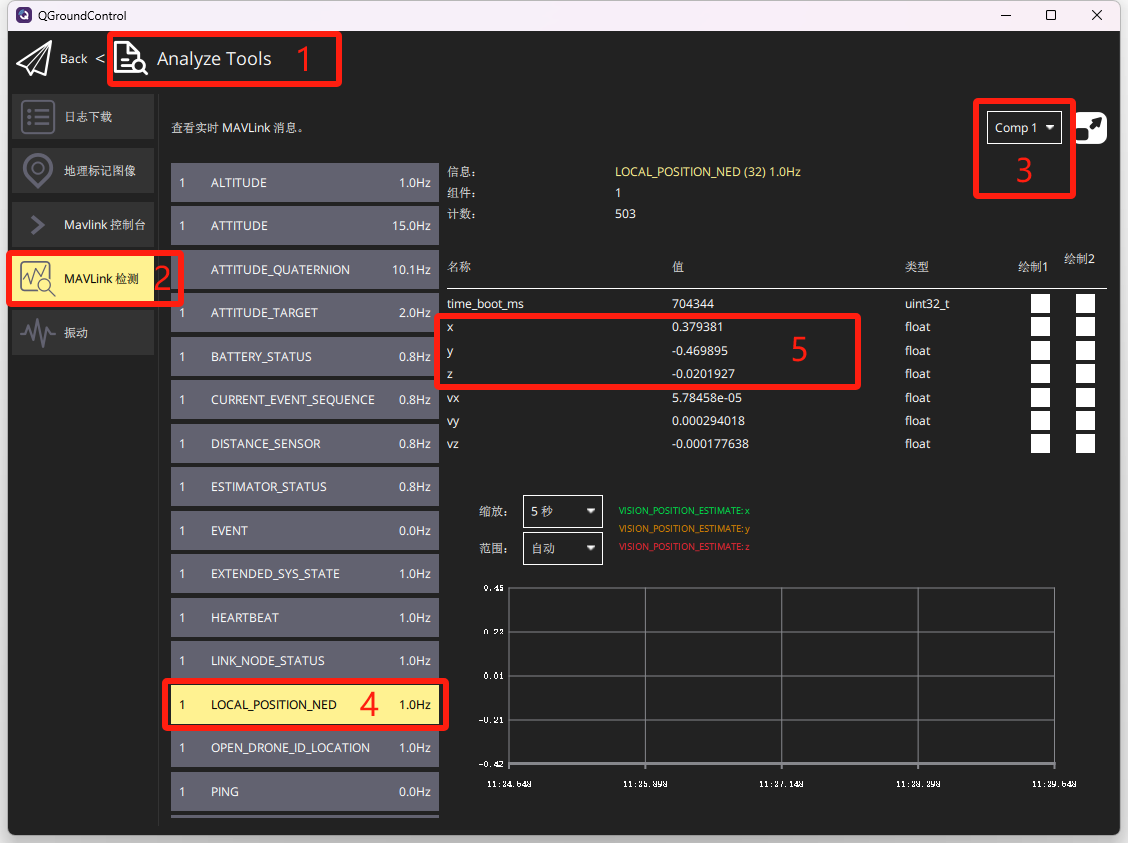
QGroundControl -> Analyze Tools -> MAVLink 检测 -> Comp 240 -> VISION_POSITION_ESTIMATE(视觉传感器数据)
-
确认 VISION_POSITION_ESTIMATE 数据频率能达到 30Hz 左右,否则可能是数传传输带宽不足、信号不佳或丢包率过高所致;移动无人机,观察对应位置数据变化是否正确
-
QGroundControl -> Analyze Tools -> MAVLink 检测 -> Comp 1 -> LOCAL_POSITION_NED
-
查看 LOCAL_POSITION_NED 数据,x,y 应融合视觉传感器数据,z 应融合测距仪数据,移动无人机,观察数据表现是否与实际一致
5.确认无人机状态
-
下方快捷信息栏可以添加自定义观察数据,根据使用需求添加观测数据
-
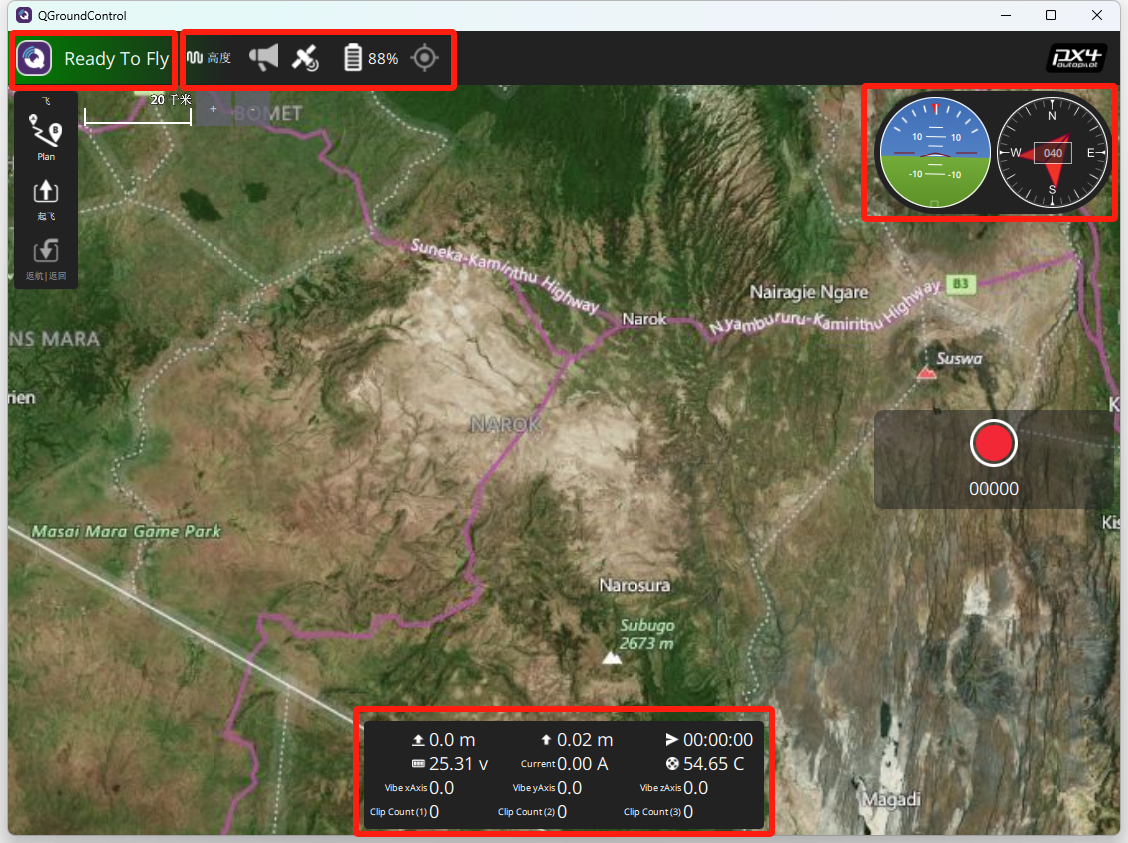
确认电池电量充足,电池电压需在 20V 以上,接近或低于 20V 则需要充电;准备飞行需确保电池电量充足
-
上方状态条显示飞行状态、飞行模式、无人机消息、GPS信息、电池信息与定位信息等,确认状态信息无误
-
绿色状态 Ready to Fly 表示状态正常,红色与黄色状态表示有错误和警告,点击该位置可详细的错误或警告信息
飞行测试 - 遥控器手动控制
测试自稳飞行模式 Stabilize (Ardupilot) / Stabilized (PX4)
1.放置无人机到起飞点:在空旷安全的场地中进行飞行测试,将无人机放置到水平的起飞地面上
2.启动 MVD35 飞行平台并进行飞行检查:按照上述 飞行检查(Ardupilot / PX4) 过程检查
3.切换到自稳飞行模式 Stabilize (Ardupilot) / Stabilized (PX4):将遥控器通道 5 三段开关(飞行模式切换开关)打到最低位置,即切换到自稳飞行模式
4.解锁无人机:将遥控器通道 8 自锁按键(解锁/上锁开关)按下,右上方绿色灯亮起,无人机电机缓慢转动,无人机已进入解锁状态
5.起飞与控制:轻推油门,使无人机离地,熟悉摇杆控制效果和该飞行模式(以无人机为第一视角,遥控器通道 1 Roll 摇杆:控制无人机左右移动;遥控器通道 2 Pitch 摇杆:控制无人机前后移动;遥控器通道 3 Throttle 摇杆:控制无人机上升下降;遥控器通道 4 Yaw 摇杆:控制无人机左右转向)
6.降落与上锁:控制遥控器油门摇杆,使无人机平稳落在地面上后,将油门摇杆打至最低,15 秒后会自动上锁,或使用遥控器右上方自锁按键(解锁/上锁开关),按下按键,右上方绿色灯熄灭,无人机电机停止转动,则无人机已上锁
测试定高飞行模式 AltHold (Ardupilot) / Altitude (PX4)
-
定高飞行模式与自稳飞行模式测试过程类似;将遥控器通道 5 三段开关(飞行模式切换开关)打到中间位置,即切换到定高飞行模式
-
定高飞行模式当油门摇杆位于中间死区(±10%)范围内时,会保持当前高度
-
在解锁后起飞的过程中,需要将油门摇杆拉至中点以上,无人机会起飞上升,离地 30cm 以上后将油门摇杆拉回至中点,无人机会保持当前高度
测试定点飞行模式 Loiter (Ardupilot) / Position (PX4)
-
没有切换到正确数据源或者无传感器数据(比如没有安装T265)时无法在定点模式解锁
-
Ardupilot 定点飞行模式可使用 第一信号源:视觉传感器+测距仪 组合 或 第二信号源:光流传感器+测距仪+罗盘 组合,通过 遥控器通道 6 对应开关切换,通道6打到中间位置(1500) 时使用光流数据源;PX4 定点飞行模式使用 视觉传感器+测距仪 组合,不支持通过遥控器切换融合数据源
-
定点飞行模式与定高飞行模式测试过程类似;将遥控器通道 5 三段开关(飞行模式切换开关)打到最高位置,即切换到定点飞行模式
-
定点飞行模式当油门摇杆位于中间死区(±10%)范围内,其它摇杆不动时,将会保持定点悬停飞行状态
-
定点飞行模式需要无人机位置状态信息:MVD35 飞行平台启动后30秒内,将自动启动视觉传感器并发送定位数据到无人机上
-
在解锁后起飞的过程中,需要将油门摇杆拉至中点以上,无人机会起飞上升,离地 30cm 以上后将油门摇杆拉回至中点,无人机在当前位置定悬停,控制右侧摇杆控制无人机前后左右运动,左侧摇杆控制无人机上下与转向运动
飞行测试 - Mission Planner 交互式控制
- Mission Planner 交互式控制为 Ardupilot 固件功能,PX4 暂不支持该功能
1.放置无人机到起飞点:在空旷安全的场地中进行飞行测试,将无人机放置到水平的起飞地面上
2.启动 MVD35 飞行平台并进行飞行检查:按照上述 飞行检查(Ardupilot) 过程检查
3.切换到定点 Loiter 飞行模式:将遥控器通道 5 三段开关(飞行模式切换开关)打到最高位置,即切换到定点 Loiter 飞行模式,再次检查 T265 视觉传感器数据
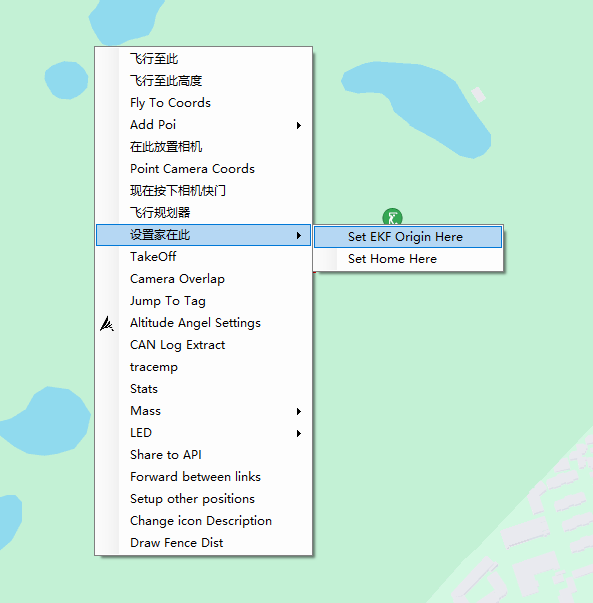
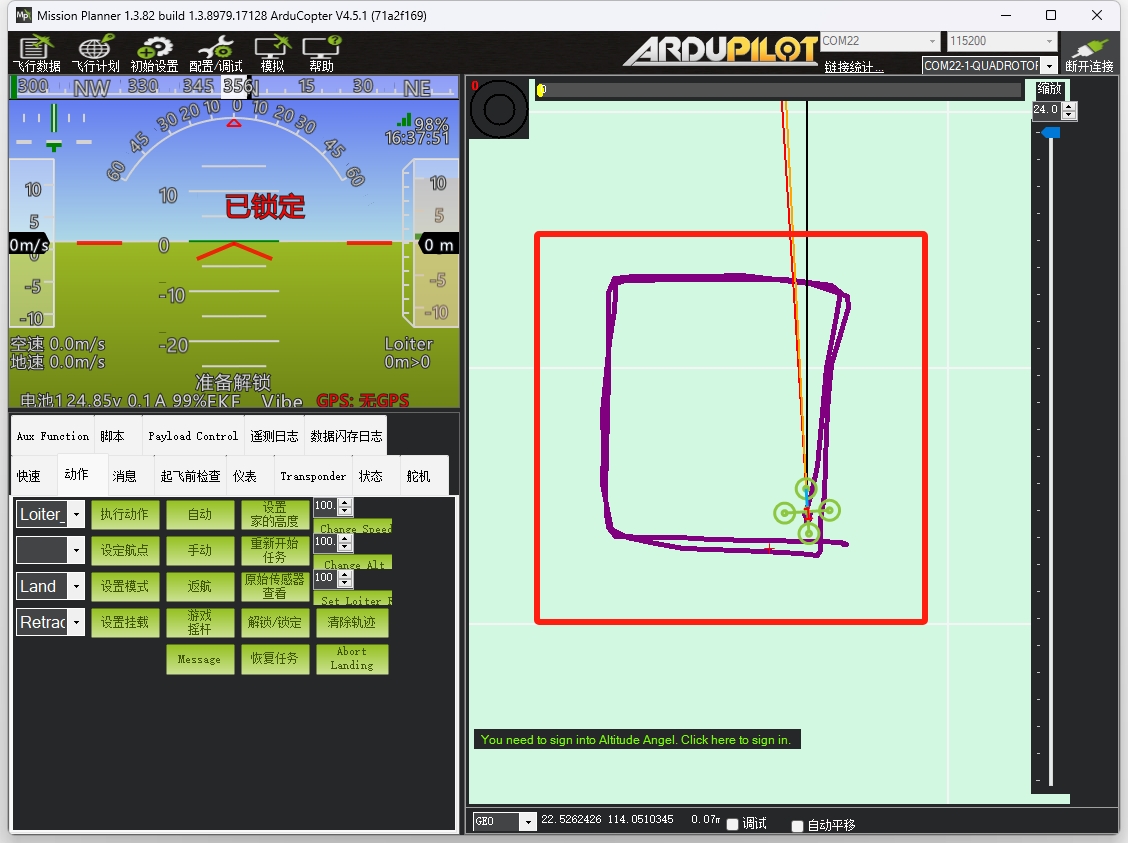
4.设置 EKF 原点:Mission Planner -> 右键点击地图界面,呼出选项列表 -> 设置家在此 -> Set EKF Origin Here (设置后,在地图上会显示无人机图标表示无人机方向与位置信息)
5.放大地图:将无人机图标所在区域放大到最大倍率,可以更明显观察无人机的位置方向信息的变化

6.确定安全边界:拿起无人机围绕飞行空间移动,Mission Planner 上地图显示飞机的轨迹,了解现实环境中的位置与地图上位置的对应关系与比例,便于安全飞行(注意:此处需要科学上网,Mission Planner 使用谷歌地图!Mission Planner 使用谷歌地图!Mission Planner 使用谷歌地图!)
7.Mission Planner 控制解锁:Mission Planner -> 飞行数据 -> 动作 -> 解锁/锁定(无人机将会解锁,桨叶缓慢转动)

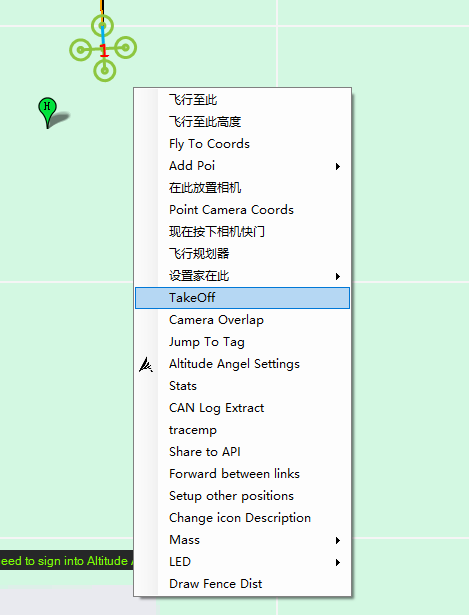
8.Mission Planner 控制起飞:Mission Planner -> 右键点击地图界面,呼出选项列表 -> TakeOff -> 弹窗输入起飞高度 1 单位:米(无人机将会缓慢起飞至指定高度后定点悬停待命)
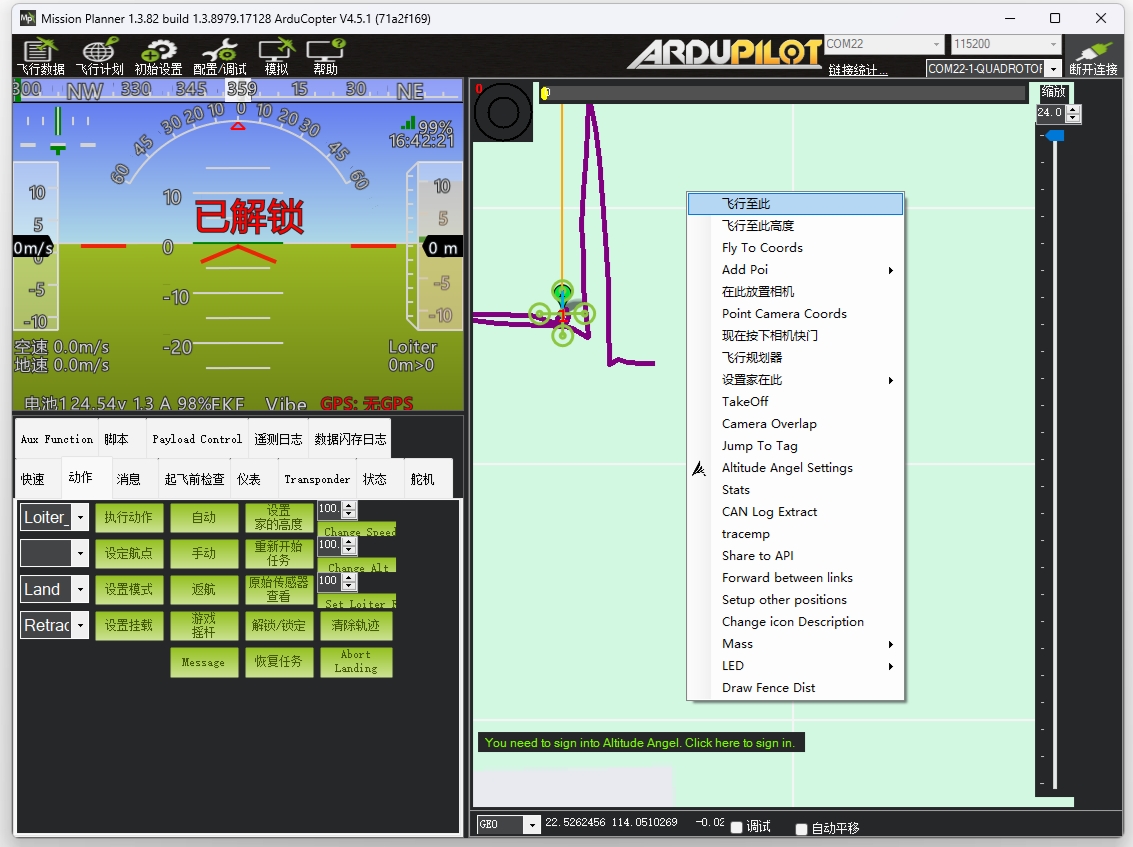
9.Mission Planner 地图选点飞行:Mission Planner -> 右键点击地图想要飞往的位置,呼出选项列表 -> 飞行至此(无人机进入 Guided 模式,将会转向并飞向指定位置后定点悬停待命,飞行途中或达到指定位置定点悬停后,可重复使用选点飞行,实时交互控制飞行)
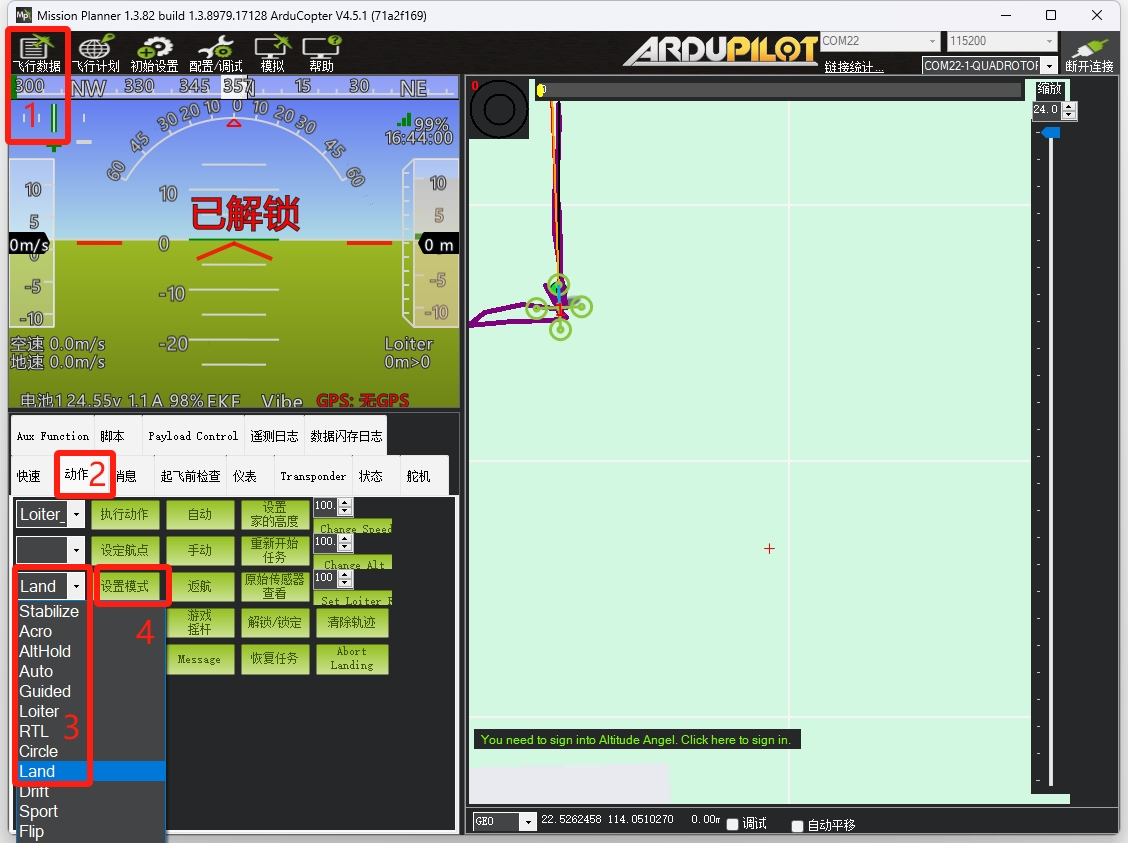
10.Mission Planner 控制降落:Mission Planner -> 飞行数据 -> 动作 -> 选择 Land 模式 -> 设置模式(无人机将会缓慢降落,降落后电机进入怠速状态,15 秒无电机输出操作将会自动上锁)
11.上锁:无人机降落后电机进入怠速状态,15 秒无电机输出操作将会自动上锁;或者通过 Mission Planner -> 飞行数据 -> 动作 -> 解锁/锁定 直接上锁
微空无人机视觉导航系列教程
1.飞行平台搭建
6.双目VIO算法实现与应用(树莓派5+D435i)
7.拓展应用案例
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)