Ardupilot开源飞控固件基础配置教程
推荐使用MicoConfigurator 现代化ArduPilot配置工具
MicoConfigurator
无需安装,打开即用,支持多平台:Windows, Mac, Linux
- 实时数据仪表盘
- 图形化功能配置与传感器校准
- 全方位引导式设置,新手友好
- 固件更新一站式解决
- 现代化飞控文件管理,高速传输
- 实时数据波形图与日志分析

一. 设置机架类型
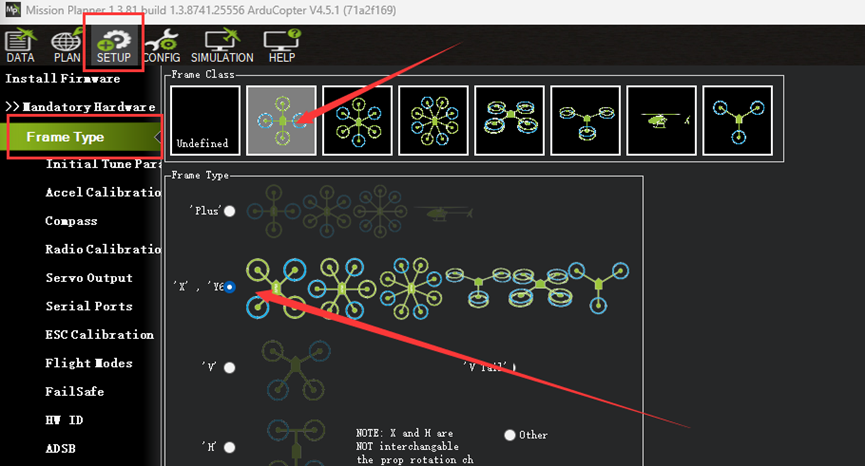
- MicoAir743飞控首次使用时需要先设置机架类型,默认为未定义。
- 在电脑上打开Mission Planner地面站软件,使用usb连接飞控。在Frame Type页面需要先选择Frame Class如四轴、六轴、八轴等,然后再选择Frame Type如十字型、X型、H型等等。最常使用的是四轴X型,如下图所示:
二. 设置电调信号类型
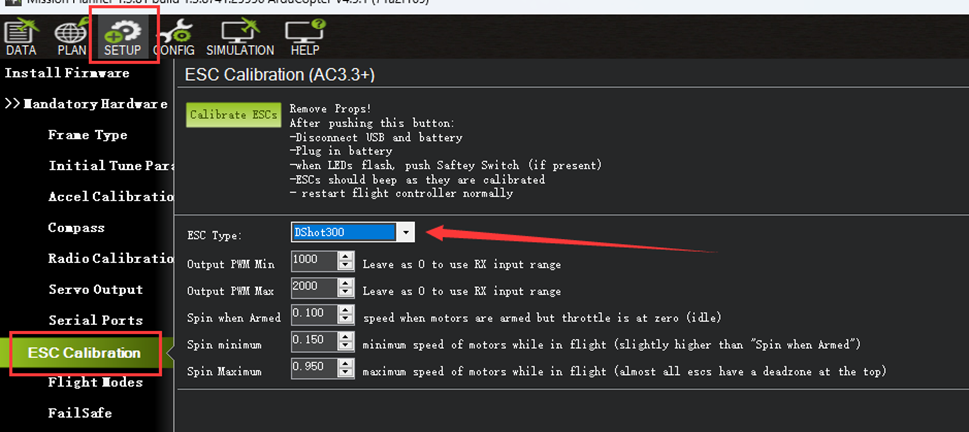
Ardupilot固件支持多种电调通信协议,如PWM(默认),OneShot,DShot(推荐使用DShot300)等等。DShot为数字协议信号,可以精确传递控制指令,无需再进行电调信号校准。
如果使用飞塔套装里的蓝鸟电调,则必须要设置为DShot300/600,否则无法驱动电机。
三. 设置电机顺序
调整顺序
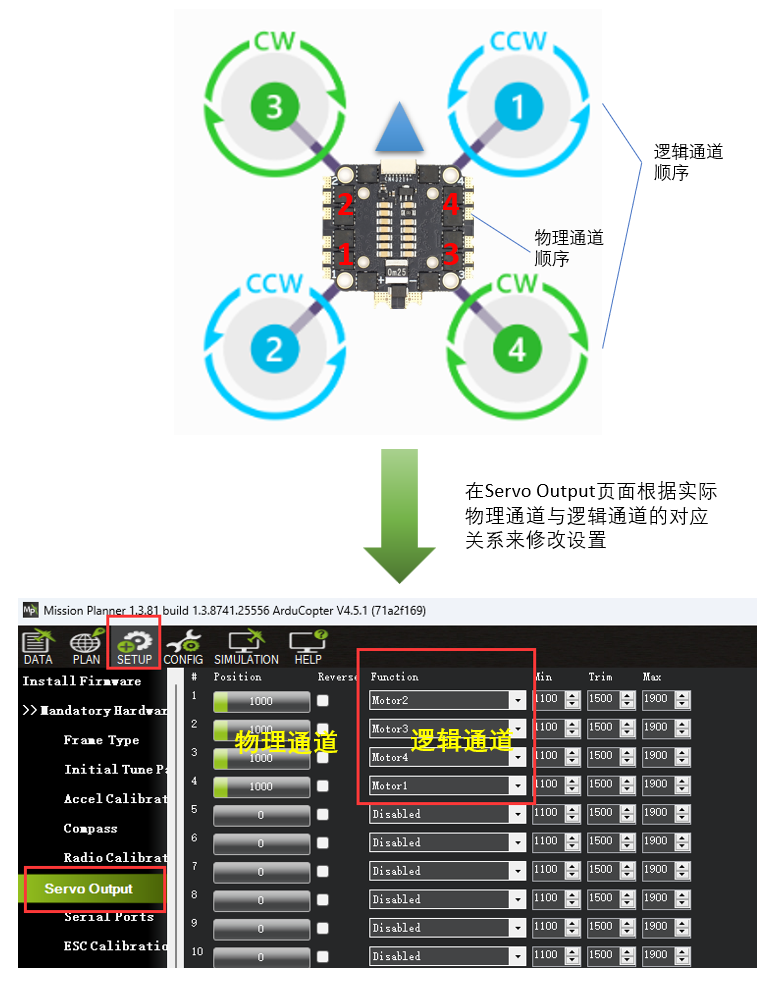
对于不同的机架类型,飞控严格指定了输出信号通道与实际电机的对应关系,飞控装机使用时,需要用户根据机架类型以及电调连接方式来调整电机顺序。详细信息可参阅 Ardupilot官方Wiki。
验证顺序
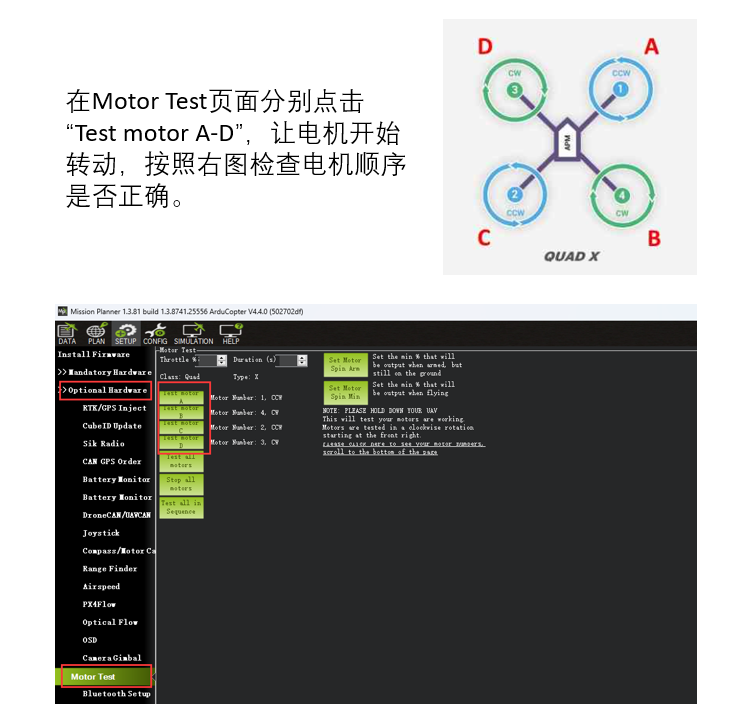
- 调整好电机顺序之后,可以通过Mission Planner地面站提供的电机测试功能来测试验证顺序是否正确。
- 注意测试前务必要卸下螺旋桨。
四. 修改电机转向
在验证电机顺序时,可以检查出电机转向是否正确:在测试电机顺序步骤,同时注意电机转动方向是否符合图示:1、2号电机逆时针转动,3、4号电机顺时针转动。如果有某个电机的转动方向和预期不一致,则需要修改。
-
修改电机转向有两种办法,一种是物理上调换电机连接至电调的三根线其中任意两根的顺序,另一种办法则是软件上修改电调方向参数。
-
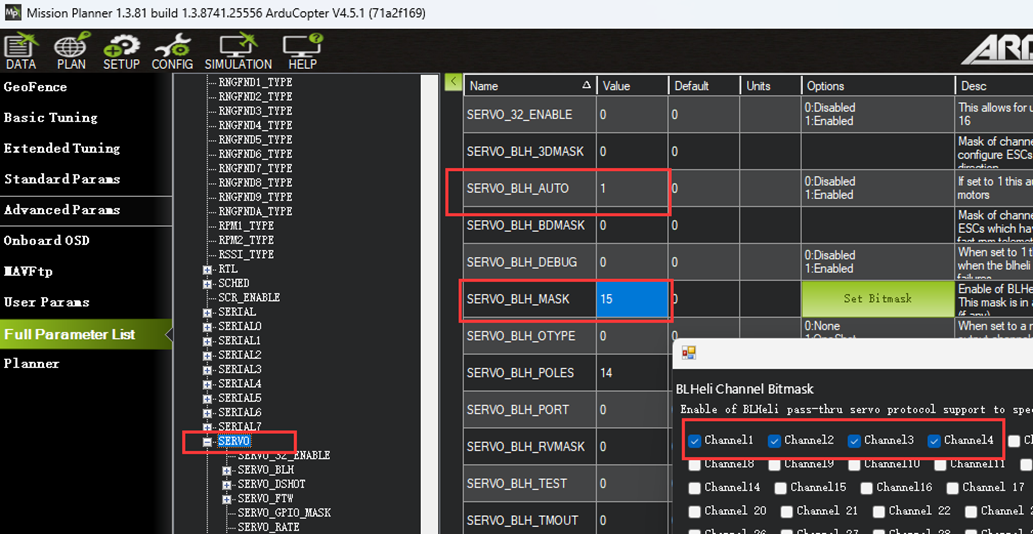
修改
SERVO_BLH_AUTO为1(Enabled), 并设置SERVO_BLH_MASK为15(使能Channel1-4),写入参数并重启飞控。注意修改完电调转向后需要将这两个参数恢复成默认值,否则无法正常驱动电调。
-
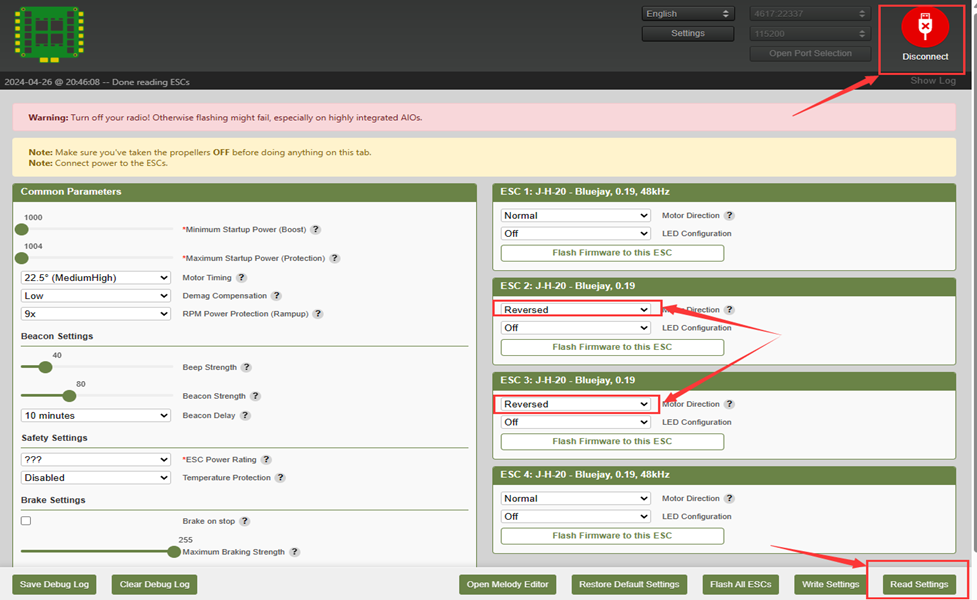
在电脑浏览器中输入esc-configurator.com,打开网页版的电调配置工具。
-
右上角点击Open Port Selection,选择“MicoAir743”,然后点击Connect。
-
连接成功后,右下角点击Read Settings,可以读取出四路电调的配置,之后便可以在Motor Direction选项中修改电机转动方向。
五. 接收机连接与配置
1. SBUS & ELRS
- 将接收机连接至RC接口(UART6),SBUB接收机只需连接SBUS信号线到Rx6,Tx6不用接。ELRS接收机需要交叉连接Rx和Tx,即接收机Rx接飞控Tx,Tx接飞控Rx。
- 配置
SERIAL6_Protocol为23 (RCIN),正常情况下这是默认设置。
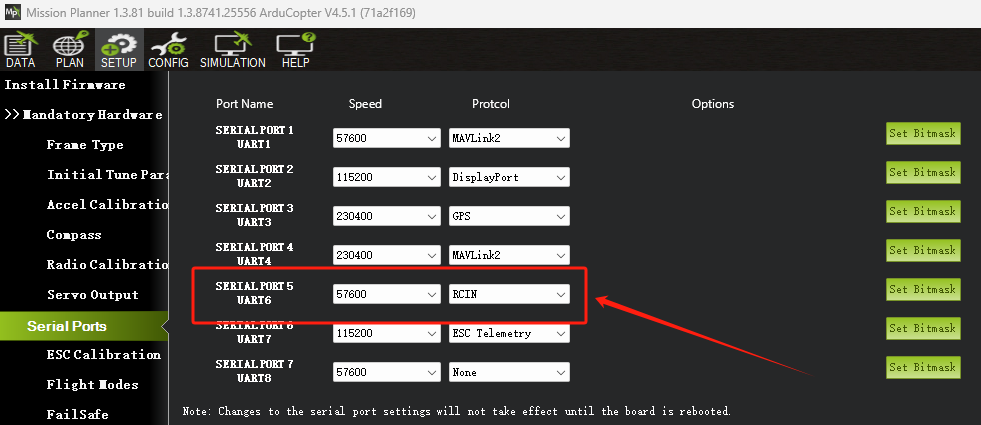
接线和设置正确且接收机已对频遥控器时,摇杆通道数据将会正常显示。
六. 初始化PID参数
MissionPlanner 1.3.81版本以后提供了一个便利功能:可根据机架尺寸和电池参数,生成对应的预设的PID和滤波等参数,避免了初期繁琐复杂的调参过程。
跳转到Initial Tune Parameter页面,通常主要设置两个参数就可以:
Airscrew size in inch: 螺旋桨尺寸,比如常用的5寸穿越机机架,这里5寸指的便是螺旋桨尺寸,因此这里可以填入5。如果是7寸则填7,以此类推。Battery cellcount:电池节数,4S电池填4,6S电池则填6
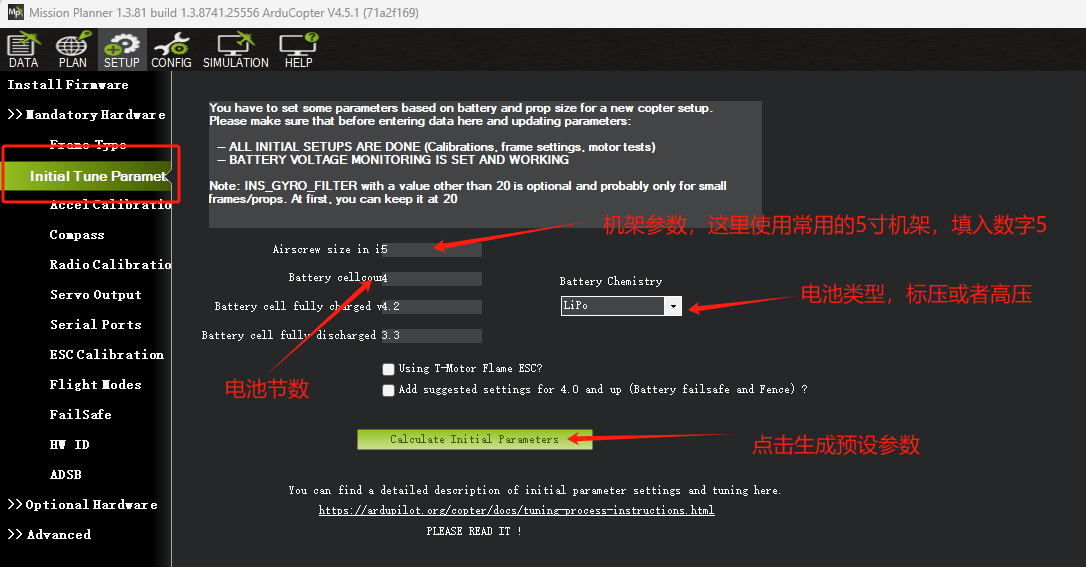
点击Calculate Initial Parameters,生成相关预设参数(大部分是滤波器参数),再点击Write to FC写入参数到飞控。
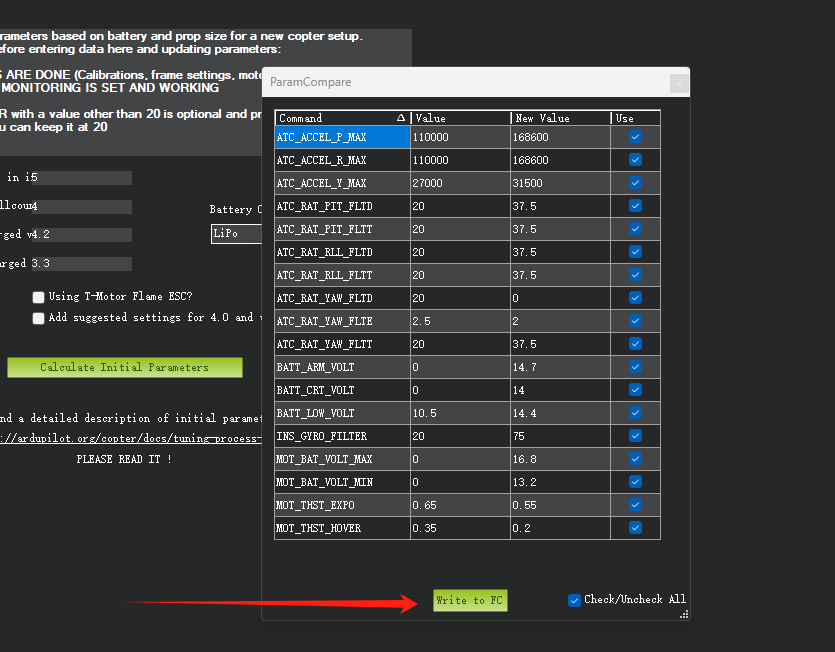
注意扫入参数完成后,需要在PID调参界面手动修改Basic Filter->Accel 值为30,如果这个数值过低可能会导致小机架定高抽搐。
七. 校准传感器
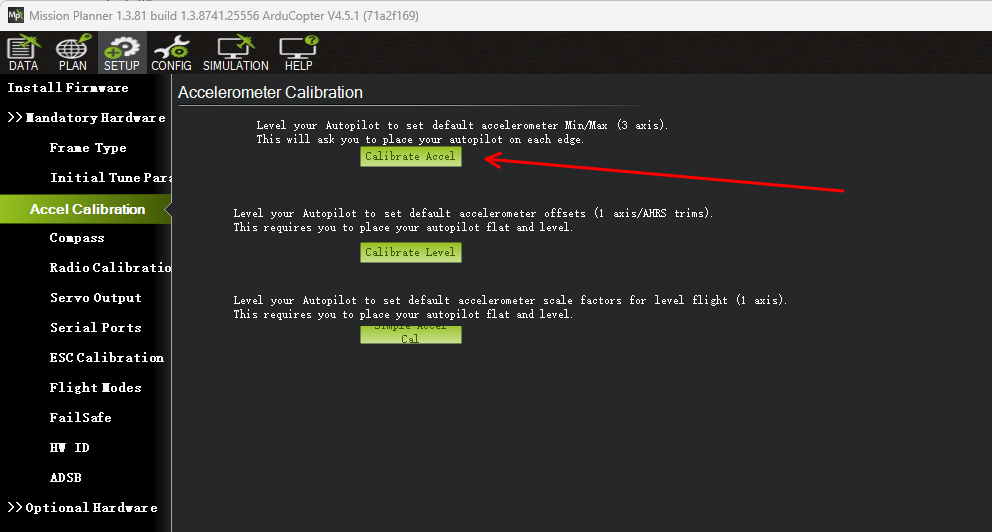
1. 校准加速度计
切换到Mission Planner的加速度计校准页面,点击Calibrate Accel:
将飞机放置水平,点击Click when Done:
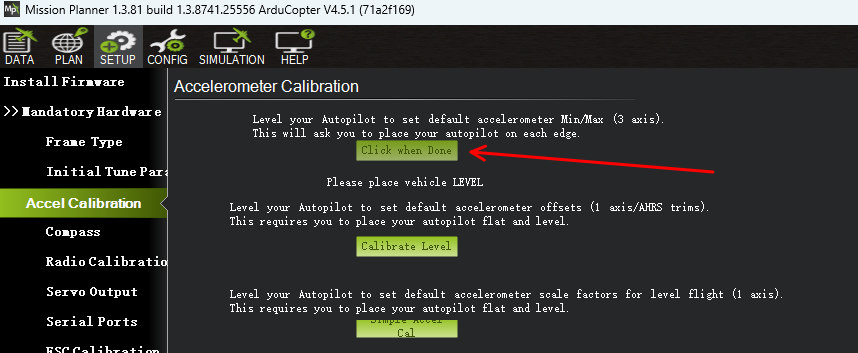
之后同样根据界面提示,将飞机朝各个方向静止放置(机身左侧朝地面、右侧朝地面、机头朝地面、机尾朝地面、倒置放置),再同样点击Click when Done,最后完成校准,界面上会显示Calibration successful。
参考下面这张图片会更容易理解这个步骤:
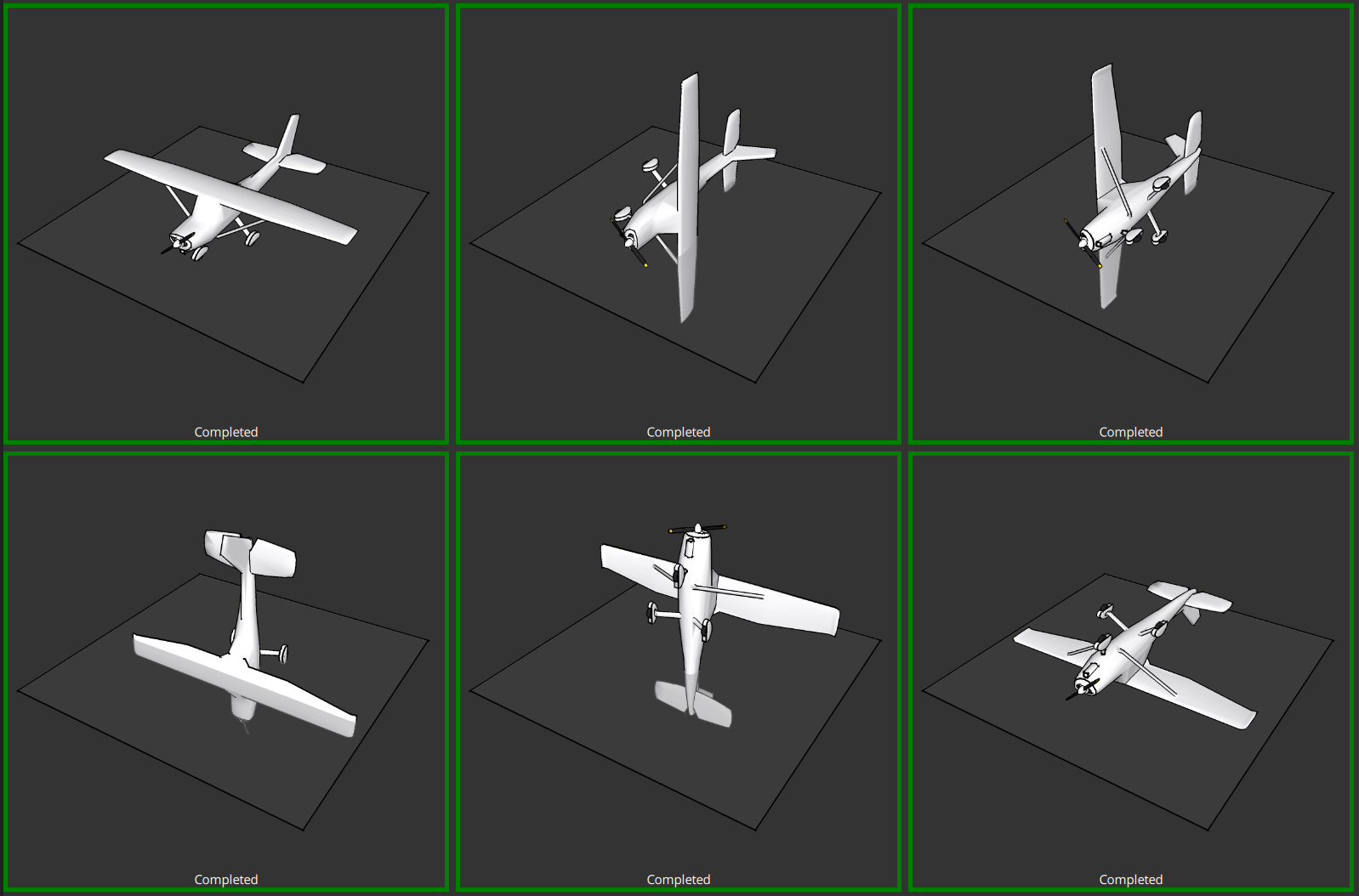
这个过程飞机总共要朝6个方向静止放置校准,因此也被称为加速度计六面校准。
2. 校准罗盘
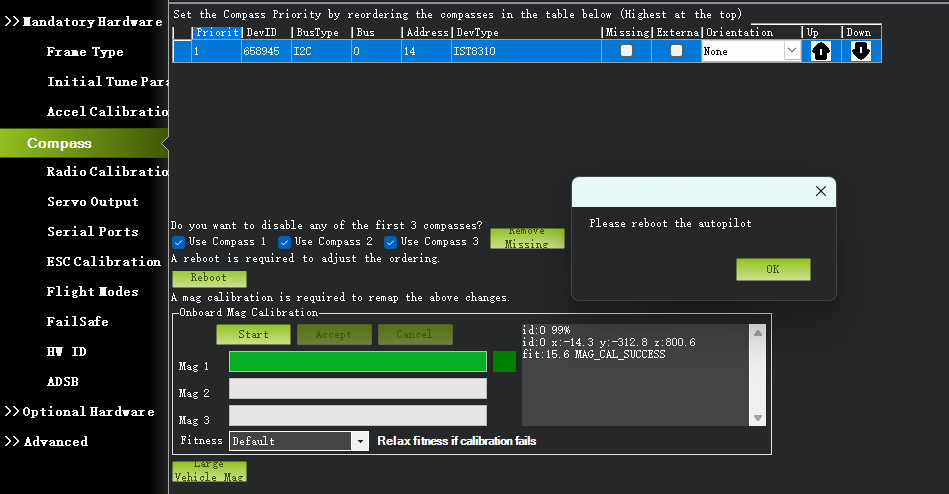
切换到Mission Planner的罗盘校准页面,点击左下方的Start启动罗盘校准。
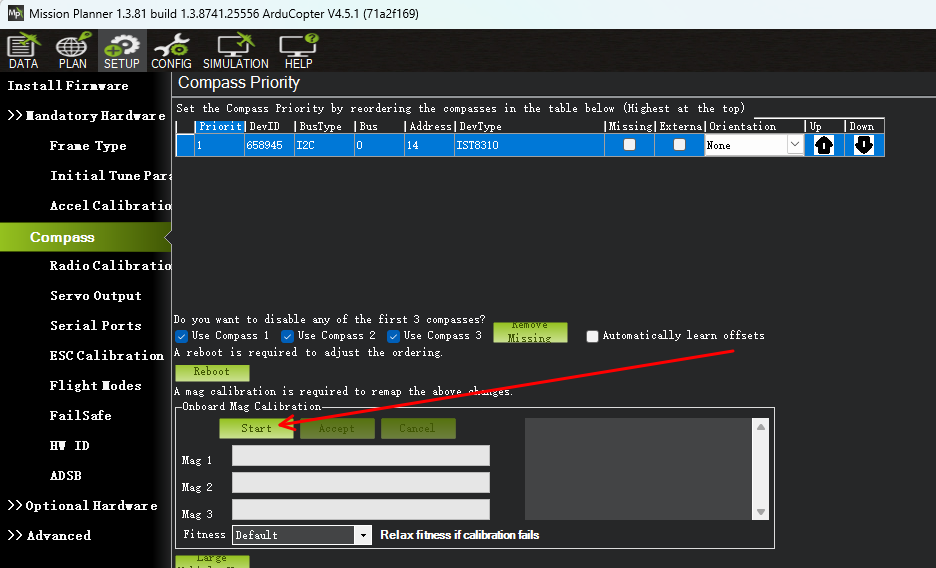
注意罗盘校准过程中需要远离金属、磁铁之类的干扰源,将飞机沿着各个轴不断转动,或者在空中画八字,此时下方的罗盘校准进度条会实时刷新,直到进度达到100%,正常情况下会显示校准成功:MAG_CAL_SUCCESS,并弹出消息框提示重启飞控。
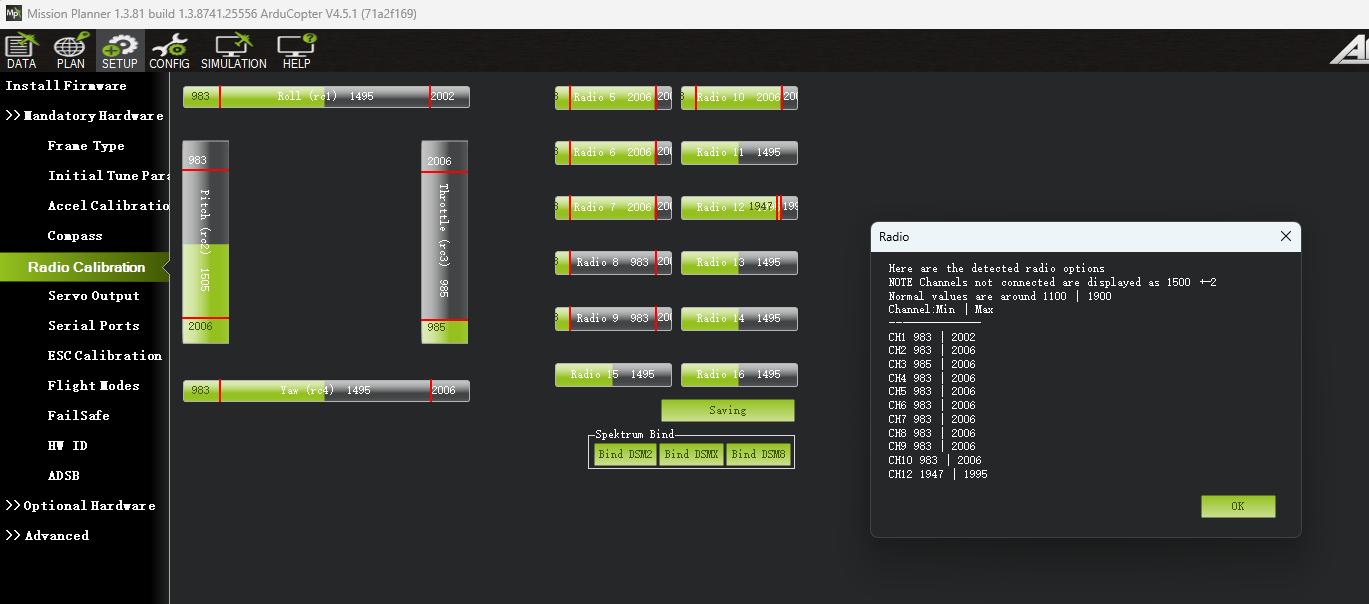
八. 校准遥控器
请先确保遥控器已经开机并正常对频接收机,且飞控已经能够正常识别到接收机信号。
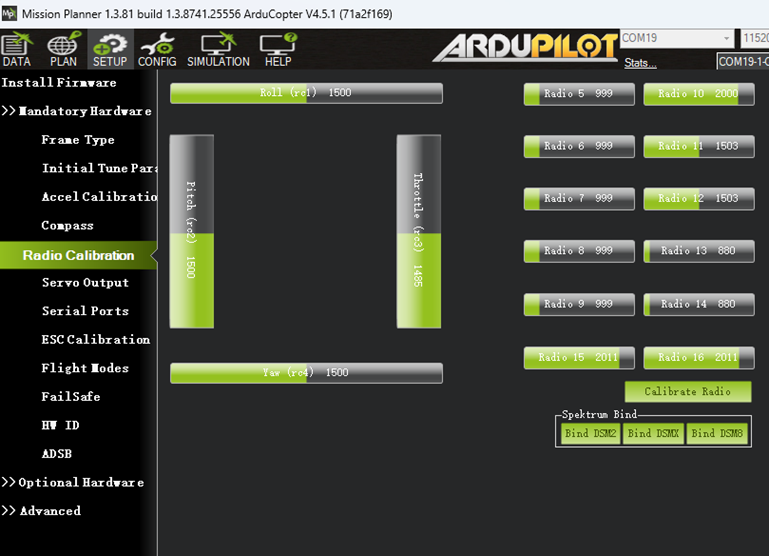
PITCH反向
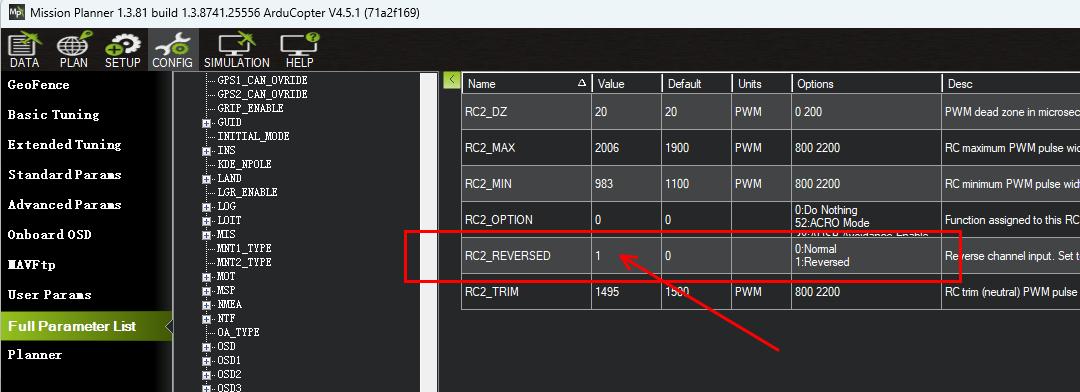
校准前需要先检查一下PITCH通道是否已经正确设置,将PITCH摇杆打到最下,Mission Planner界面上的PITCH值输出最大,如下图所示:

如果不是,需要先设置PITCH(RC2)通道反向:RC2_REVERSED = 1
校准通道
在Radio Calibration页面点击Calibrate Radio,启动遥控器通道校准。

开始校准后,将遥控器摇杆和通道来回数次打到极限值(上下左右),最后点击完成结束校准。
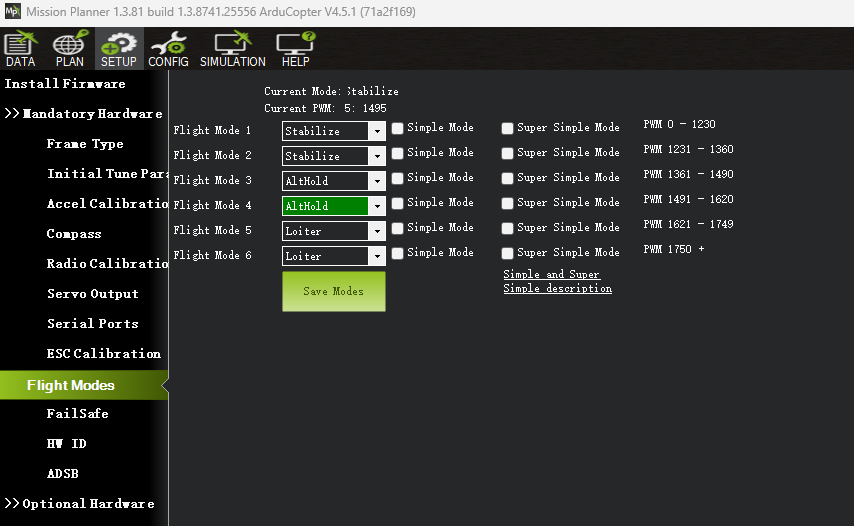
九. 设置飞行模式
Ardupilot固件默认使用通道5来切换飞行模式,可以修改FLTMODE_CH参数换成其它通道。
切换到Mission Planner的飞行模式设置页面,此处可以设置不同通道值所对应的飞行模式,通常遥控器通道开关只有3段,一般我们可以设置三种模式与开关相对应。
常用的飞行模式:
- Stabilize 自稳,最基础的飞行模式
- AltHold 定高,油门摇杆直接控制高度,油门摇杆居中时飞行高度保持不变
- Loiter 留待,定点模式的一种,仅当有GPS、光流、视觉等可以提供水平信息的传感器时可以使用
- PosHold 另外一种定点模式
- Acro 手动模式,该模式下直接控制机身角速度,机身姿态不会自动恢复水平,需要飞行员有较高的操纵水平
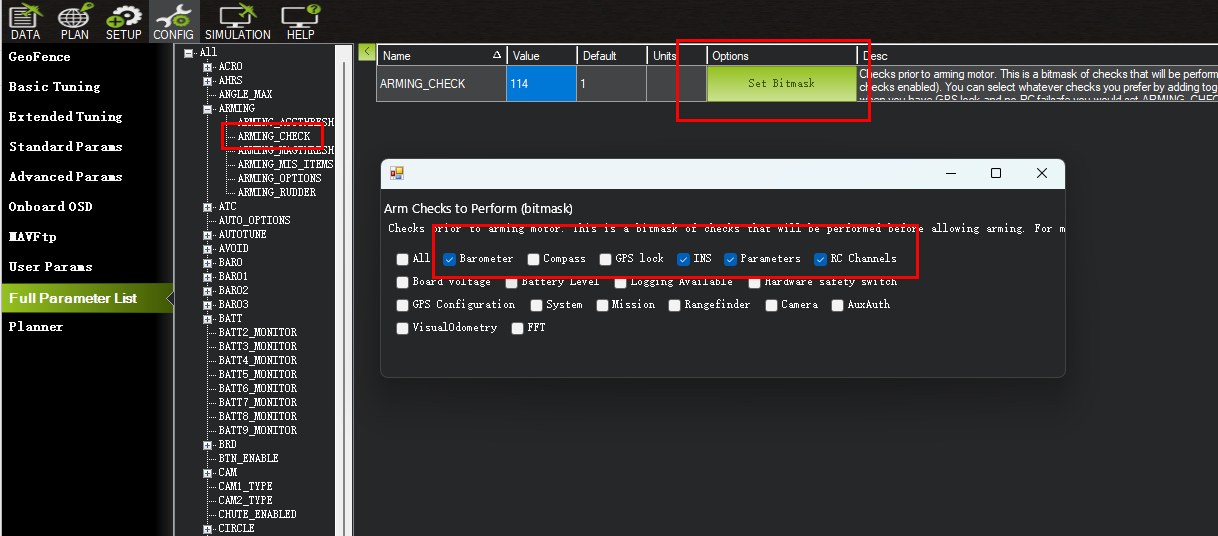
十. 解锁检查
第一次飞行前需要先设置解锁检查参数,否则在测试阶段飞控大概率会无法解锁。默认参数下全部解锁检查打开,要能一次性满足所有检查并不简单。
在MP的全部参数列表中找到ARMING_CHECK参数,点击Set Bitmask进行设置。
通常建议只需要勾选几个必要检查,比如Barometer, INS等等。
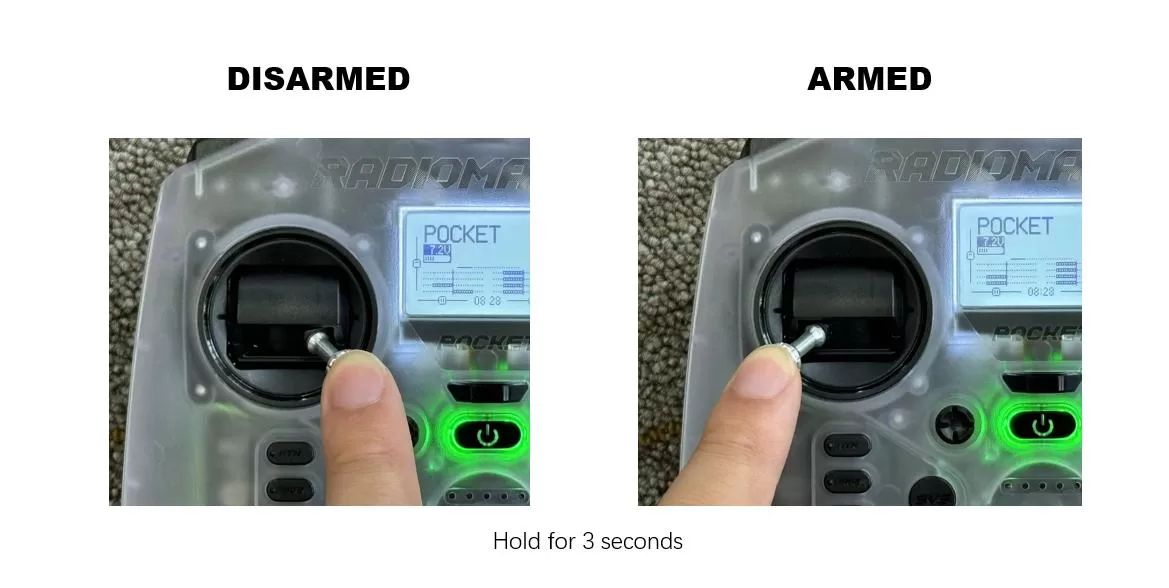
十一. 解锁飞行
Ardupilot的默认解锁方式为油门摇杆打到右下持续3秒,同样上锁方式为油门摇杆打到左下持续3秒(需要飞机处于落地状态)。
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)