微空 AI agent 智能无人机教程 1 - MVD35飞行平台搭建
微空 AI agent 智能无人机教程 1 - MVD35飞行平台搭建
微空科技 AI agent 智能无人机教程详细介绍了如何从零开始搭建你的 AI agent 智能无人机平台。该平台实现了手机和电脑通过日常通信软件控制并下达智能任务,无人机平台分析任务并执行,并将任务结果与执行报告反馈给用户等功能。更多的自定义功能也可以在该无人机平台上验证并实现。本系列教程涵盖了从无人机装配、飞行设置、机载电脑扩展到实现智能化控制的过程,教程中涉及的模型图纸、3D打印件、项目工程等都开源,可以通过教程提供的链接或 Github 仓库下载。
微空科技 AI agent 智能无人机系列教程包括:
- MVD35飞行平台搭建
- Ardupilot及PX4飞行设置和调试
- 机载电脑及视觉传感器加装和环境配置(树莓派5 + Intel RealSense D430)
- 双目 VIO 部署运行
- AI agent 智能体接入
- AI agent 智能任务 Skill 编写与执行测试案例
准备内容
1. 硬件清单
| 序号 | 名称 | 数量 | 备注 |
|---|---|---|---|
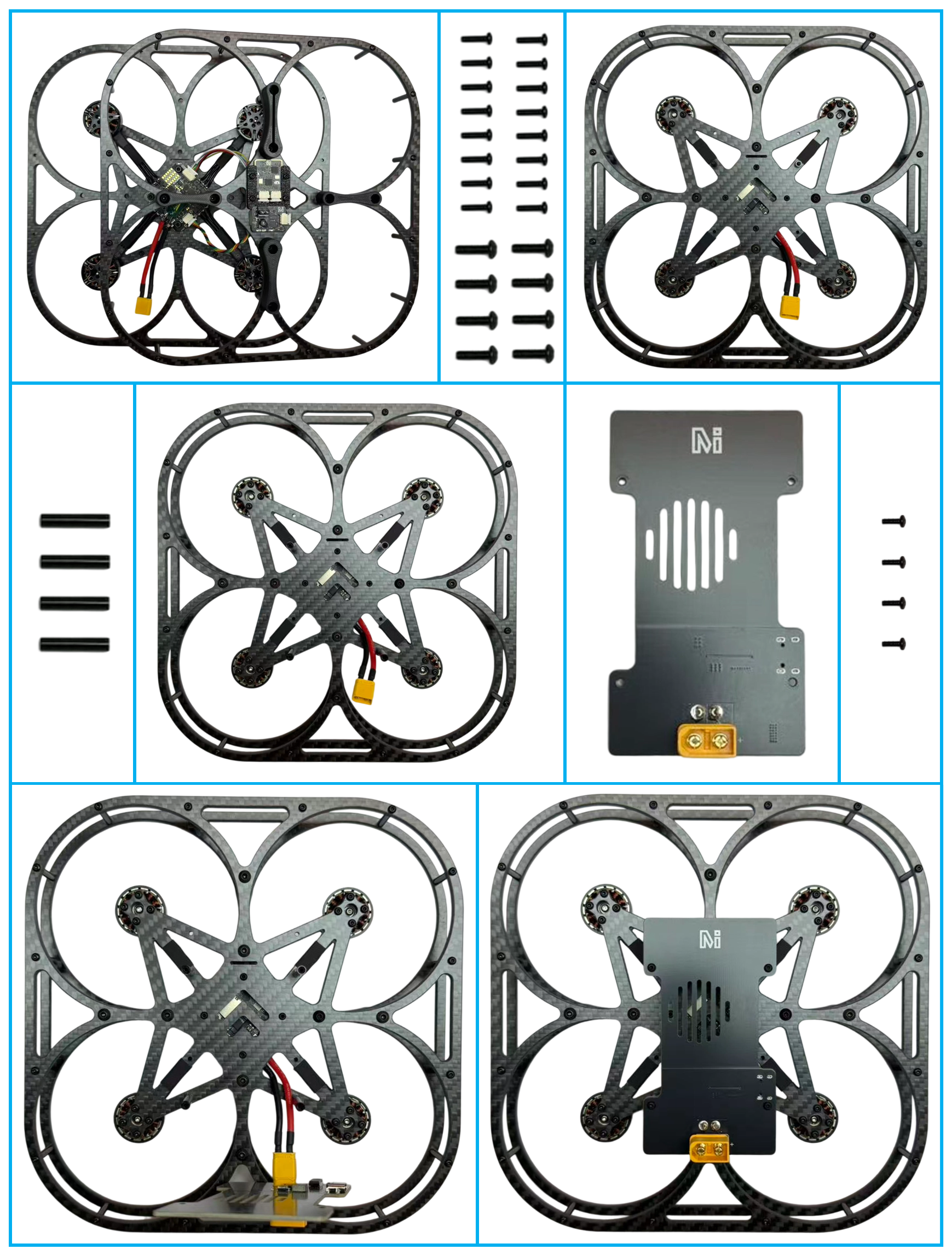
| 1 | MVD35机架套件 | 1 | 套件包含:微空 5V5A 机载电脑稳压板 ×1、碳纤主板 ×1、碳纤底板 ×1、MVD35脚架一 ×2、MVD35脚架二 ×1、MVD35脚架三 ×1、电池绑带 ×1、微空 TRS接收机固定件 ×1、M3×6×20工型铝柱 ×8、M2×3.5×20圆形铝柱 ×16、M2×4×20圆形铝柱 ×4、M2×4×5圆形铝柱 ×4、M3×8圆头螺丝 ×8、M3×10圆头螺丝 ×8、M2×6圆头螺丝 ×4、M2×8圆头螺丝 ×36、M2×14圆头螺丝 ×8、M2六角螺母 ×4、电池绑带 ×1 |
| 2 | MicoAir743v2-AIO-35A一体飞控 | 1 | 套件包含:MicoAir743v2-AIO飞控 ×1、4G TF存储卡 ×1、220uF高频低阻电容 ×1、XT30电源线 ×1、M2×7.5减震柱 ×4 及 配套SH1.0连接线若干 |
| 3 | 2004 2100KV 无刷电机 | 4 | 包含电机及桨叶固定螺丝:M2×6圆头螺丝 ×16、M2×8圆头螺丝 ×8 |
| 4 | HQprop 3.5' 正反桨 | 4 | CW×2 + CCW×2 |
| 5 | 微空 MTF-02P 光流测距一体传感器 | 1 | 提供基础定点悬停功能支持 |
| 6 | 微空 TRS 2.4G 遥数一体接收机 | 1 | 遥数一体无线链路,提供遥控器控制与数传链路,便于在调试过程中的实时数据监测。需搭配微空 TRS 2.4G 遥数一体高频头使用 |
| 7 | 6S1P 1500mAh 高压版锂电池 | 1 | 动力电池 |
| 8 | 遥控器 | 1 | 需有外部 NANO 接口 |
| 9 | 微空 TRS 2.4G 遥数一体高频头 | 1 | 配套微空 TRS 2.4G 遥数一体接收机使用 |
微空科技 MVD35 基础版包含以上 1~6 项所含硬件,装配完成并通过实飞测试,搭配 7~9 项即可“到手飞”
机架碳纤板模型与打印件下载链接见本篇教程附录
2. 工具准备
- 焊接平台(电烙铁、焊锡丝、助焊剂)
- 六角螺丝刀套装(H1.5、H2.0)
- 剪线钳、尖嘴钳、镊子
3. 装配图解概览
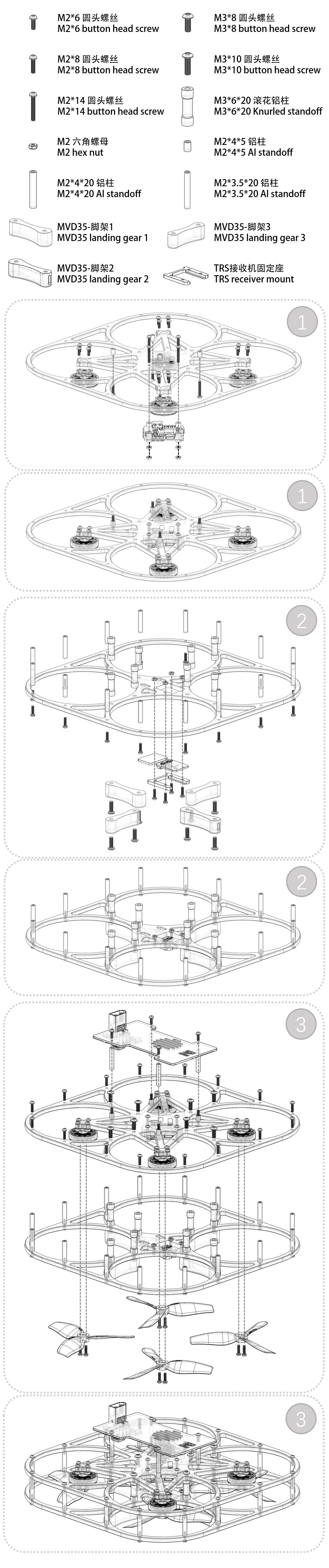
MVD35 基础版装配详解
1. 安装飞控
-
MVD35碳纤主板机臂上有 8个 2mm孔位,用于安装机载电脑及电源稳压板,安装位置可以根据实际使用情况调整,由于后期拓展安装双目视觉传感器位于前面,我们将机载电脑及电源稳压板安装在靠后位置。
-
将 4颗 M2×14圆头螺丝穿过机臂上的孔位,并使用 4颗 M2×4×5圆形铝柱固定到碳纤主板上。
-
将 4颗 M2×7.5减震柱 安装到 MicoAir743v2-AIO-35A一体飞控上,减震柱较长的部分位于飞控正面。
注意:飞控出厂已经装配好 TF卡,若无 TF卡,则需自行加装,便于后续的脚本存储与飞行日志记录
-
将 4颗 M2×14圆头螺丝穿过 MVD35碳纤主板中心孔位,并使用 4颗 M2六角螺母将飞控固定到碳纤板上。
注意:MVD35中电机为倒装,所以飞控正面一侧贴近碳纤主板,背面一侧远离碳纤主板
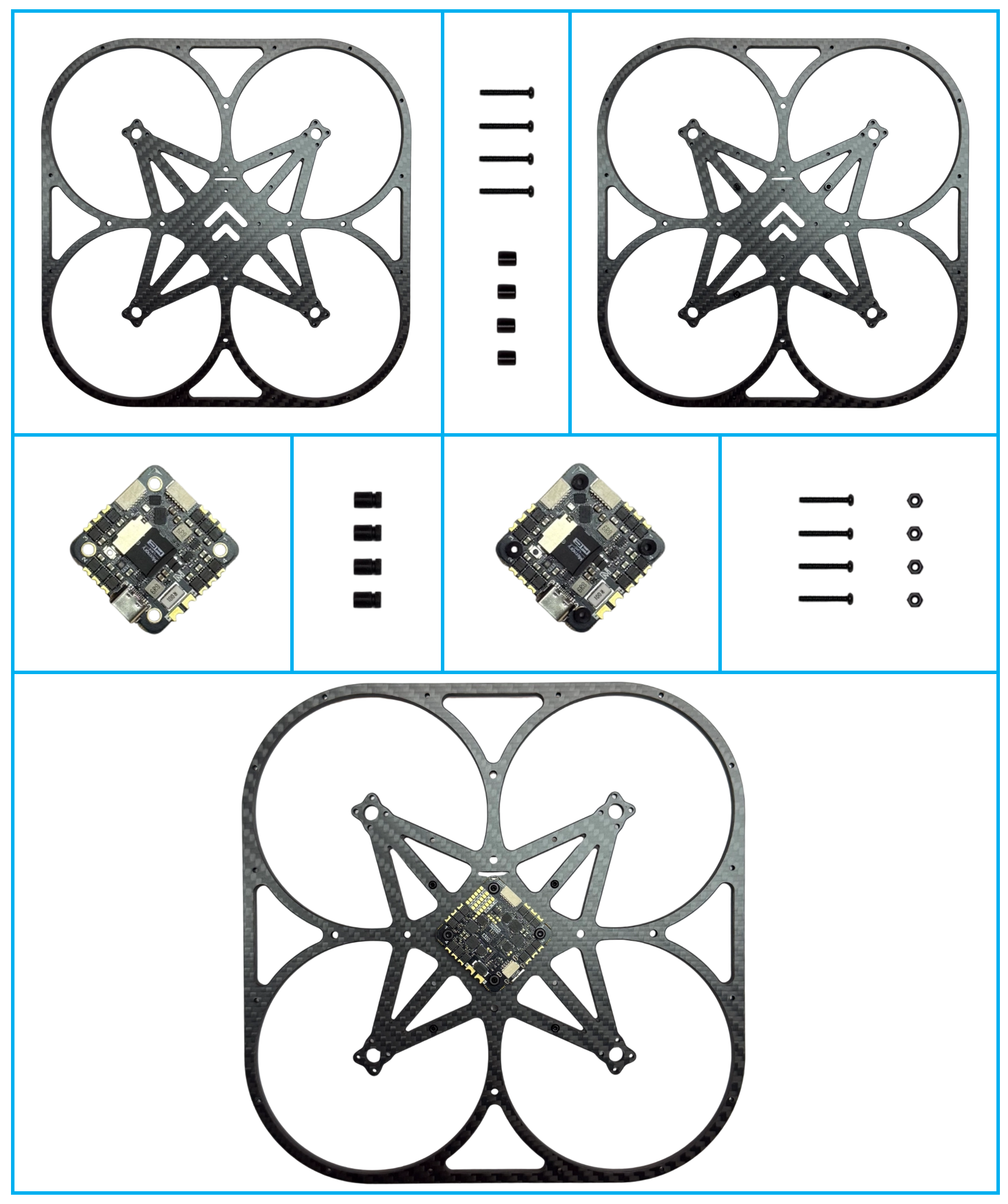
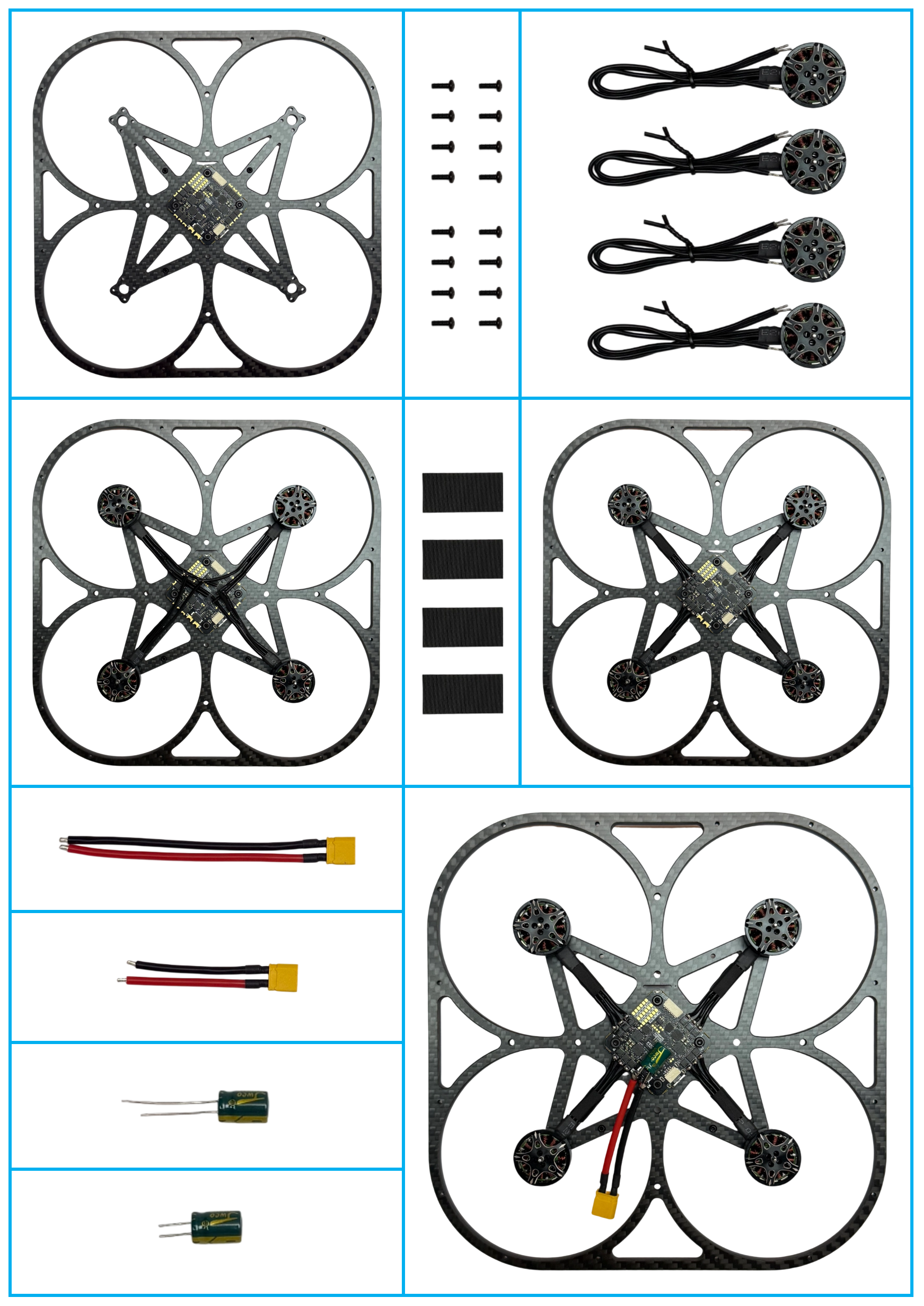
2. 安装电机
-
将 4个电机安装到碳纤主板电机安装位上,电机线束沿机臂方向,使用 16颗 M2×6圆头螺丝固定。
-
使用 4条长 4厘米、宽 1.5厘米醋酸胶布将电机线束缠绕固定到机臂上。
-
将电机线裁剪到适当的长度,剥掉线头,焊接到 AIO板上的电调焊盘。
-
将 XT30电源线裁剪到合适长度并剥掉线头(红色线约 58mm,黑色线约 55mm);电容引脚也裁剪到合适的长度,并焊接到 AIO板上的电源焊盘。
注意:适当提高焊接温度,确保焊点稳固饱满,避免虚焊;尽量避免焊接过程溅锡,如有溅锡,焊接后需将溅出的锡珠清理干净,避免造成电路短路。
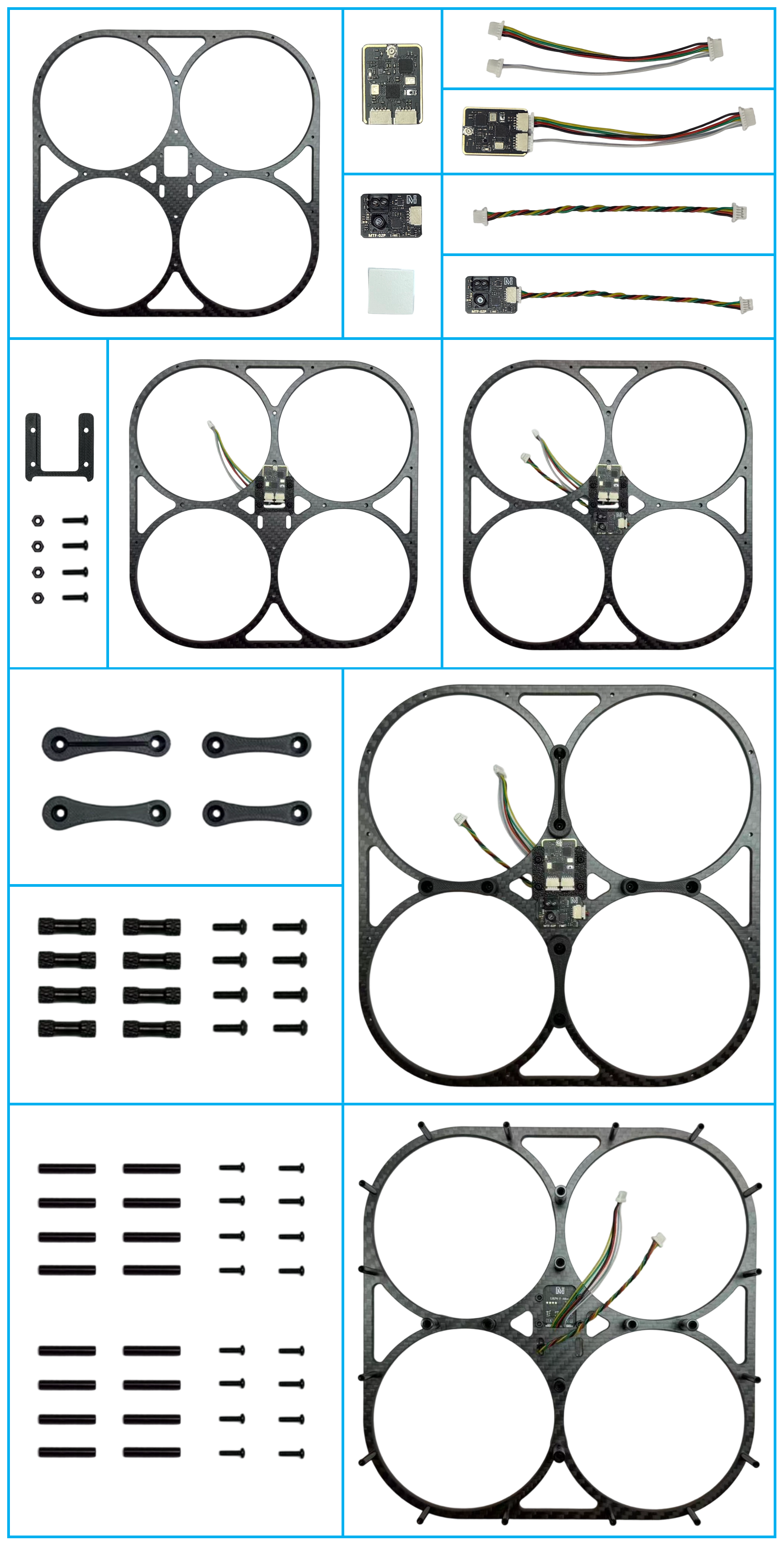
3. 底板部分
-
将 SH1.0-6P 转 SH1.0-4P×2 硅胶线插入 TRS接收机;SH1.0-4P 硅胶线插入 MTF-02P 光流测距一体传感器
SH1.0 接口插入时注意垂直拔插,避免将接口内针插弯导致短路或断路,如后续遇到供电异常或数据不通问题,可以排查一下是否是接口内针插弯导致;如果有插弯的针脚,用镊子挑正后重新插入即可
MicoAir743v2-AIO-35A一体飞控配套的硅胶线不含 SH1.0-6P 转 SH1.0-4P×2,可用配套的 SH1.0-6P 与 SH1.0-4P 硅胶线改成对应适合的线,用镊子将 SH1.0 接头固定部分挑开后可以将线头拔出后,根据使用需求组配接头和线序,具体的线序可以参考 MicoAIr743v2-AIO-35A一体飞控接线示意图
-
将 TRS接收机使用微空 TRS接收机固定件安装到 MVD35碳纤底板上,使用 4颗 M2×8圆头螺丝和 M2六角螺母固定。
-
将 MTF-02P 光流测距一体传感器使用双面背胶粘到碳纤底板上,线束穿过碳纤板上孔位,固定位置卡在微空 TRS接收机固定件凹槽上。
-
将 MVD35脚架打印件安装到碳纤底板上,使用 8颗 M3×10圆头螺丝和 M3×6×20工型铝柱固定。
带沟槽的脚架安装在接收机一侧,其中的沟槽和通孔是接收机天线的安装位置
两侧的脚架并不是对称的,安装的时候注意较大的一头靠近外侧,确保脚架轮廓与碳纤底板轮廓重合
-
将 16个 M2×3.5×20圆形铝柱配合 M2×8圆头螺丝安装到碳纤底板上。
4. 安装底板与电源稳压板
-
将 MTF-02P 接线插到飞控 UART4 4pin座子上;将 TRS接收机接线插到飞控 UART1/6 6pin座子上。
-
使用 16颗 M2×8圆头螺丝和 8颗 M3×8圆头螺丝将 MVD35碳纤主板和底板固定。
-
将 4个 M2×4×20圆形铝柱安装到机载电脑安装预留孔位上。
-
将飞控 XT30电源线接到机载电脑稳压板 XT30接口,并使用 4颗 M2×6圆头螺丝固定到 M2×4×20圆形铝柱上。
机载电脑固定处所用的圆形铝柱与碳纤板连结所用铝柱有所不同,避免混用,机载电脑固定的铝柱外径更大一些
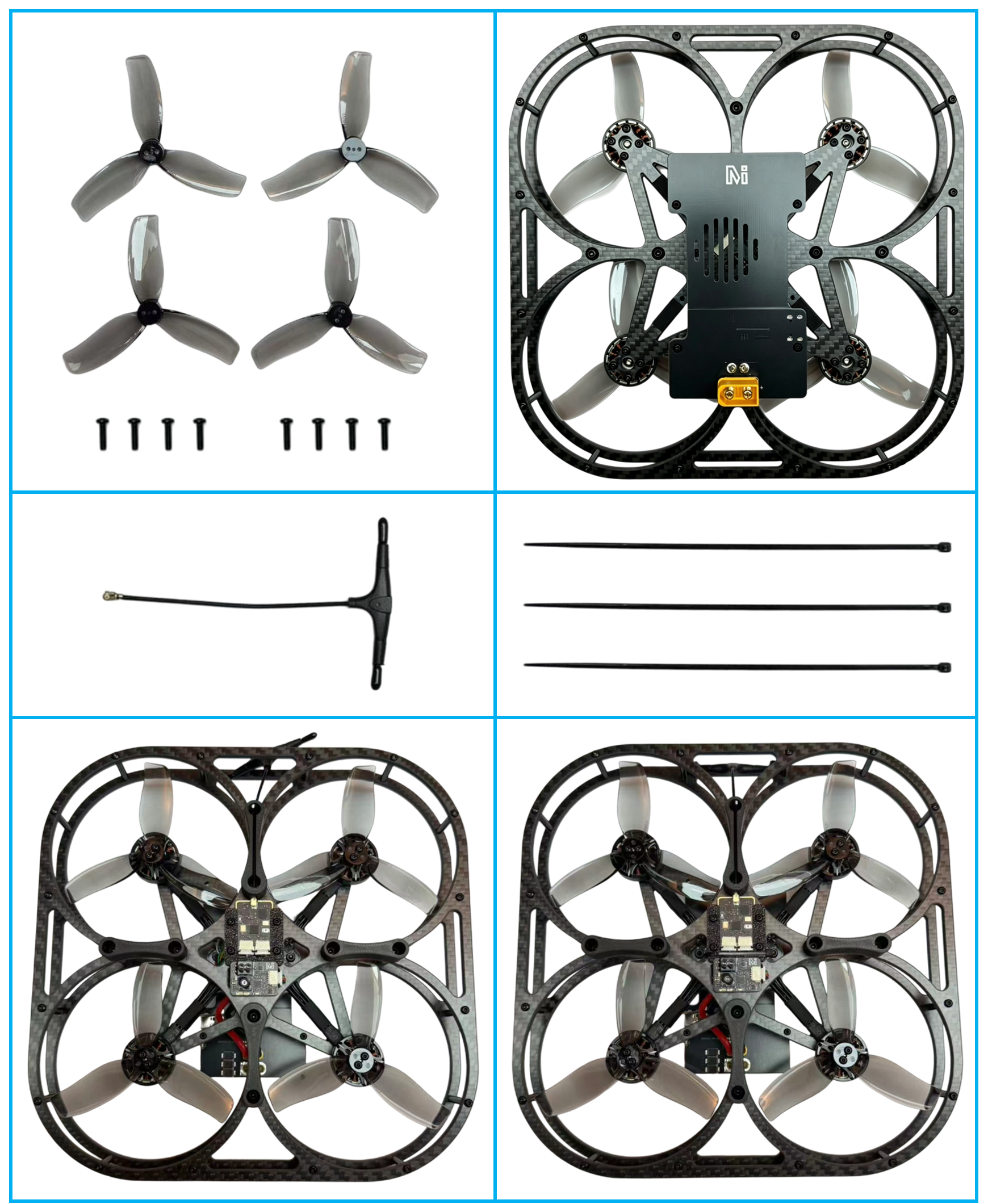
5. 安装桨叶与接收机天线
-
将一套 3.5' HQprop三叶桨安装到电机上,使用 8颗 M2×8圆头螺丝固定。
桨叶分为顺时针桨和逆时针桨,右上和左下电机安装逆时针桨,左上和右下电机安装顺时针桨
-
将 85mm 2.4G T型天线侧着穿过脚架的通孔与凹槽,并扣紧天线与 TRS接收机上 IPEX接口。
-
使用两根扎带将 T型天线头部固定到 MVD35碳纤主板上;使用一根扎带穿过 MVD35碳纤底板将连接飞控板的硅胶线固定好。
6. 安装电池
-
将自备的电池使用电池绑带固定到机载电脑稳压板上,电池平衡头夹在电源线中间
重心检查:将电池固定好后,用手指从底部托住碳纤板中心,整机应大致保持水平,如明显前倾或后倾,通过调整电池前后位置来校正重心
电池推荐:6S1P 高压版锂电池
-
将电池 XT60插头插入电源稳压板上,上电启动,可以听到电机的启动音并检查飞控及其它配件指示灯状态是否正常。

飞行平台概览
MVD35 基础版
-
接口关系
UART1 <-> TRS 接收机(数传)
UART4 <-> MTF-02P(光流测距)
UART6 <-> TRS 接收机(SBUS 遥控信号) -
硬件参数
参数 规格 整机重量(含电池) 约 500 g 整机重量(不含电池) 约 280 g 轴距 138.6mm 桨叶尺寸 3.5 inch 悬停续航 约 13 min
附录
模型与打印件
MVD35 碳纤主板.stp
MVD35 碳纤底板.stp
MVD35 微空 TRS接收机固定件.stl
MVD35 脚架一.stl
MVD35 脚架二.stl
MVD35 脚架三.stl
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)