微空RTK系列产品用户手册
1. 产品简介
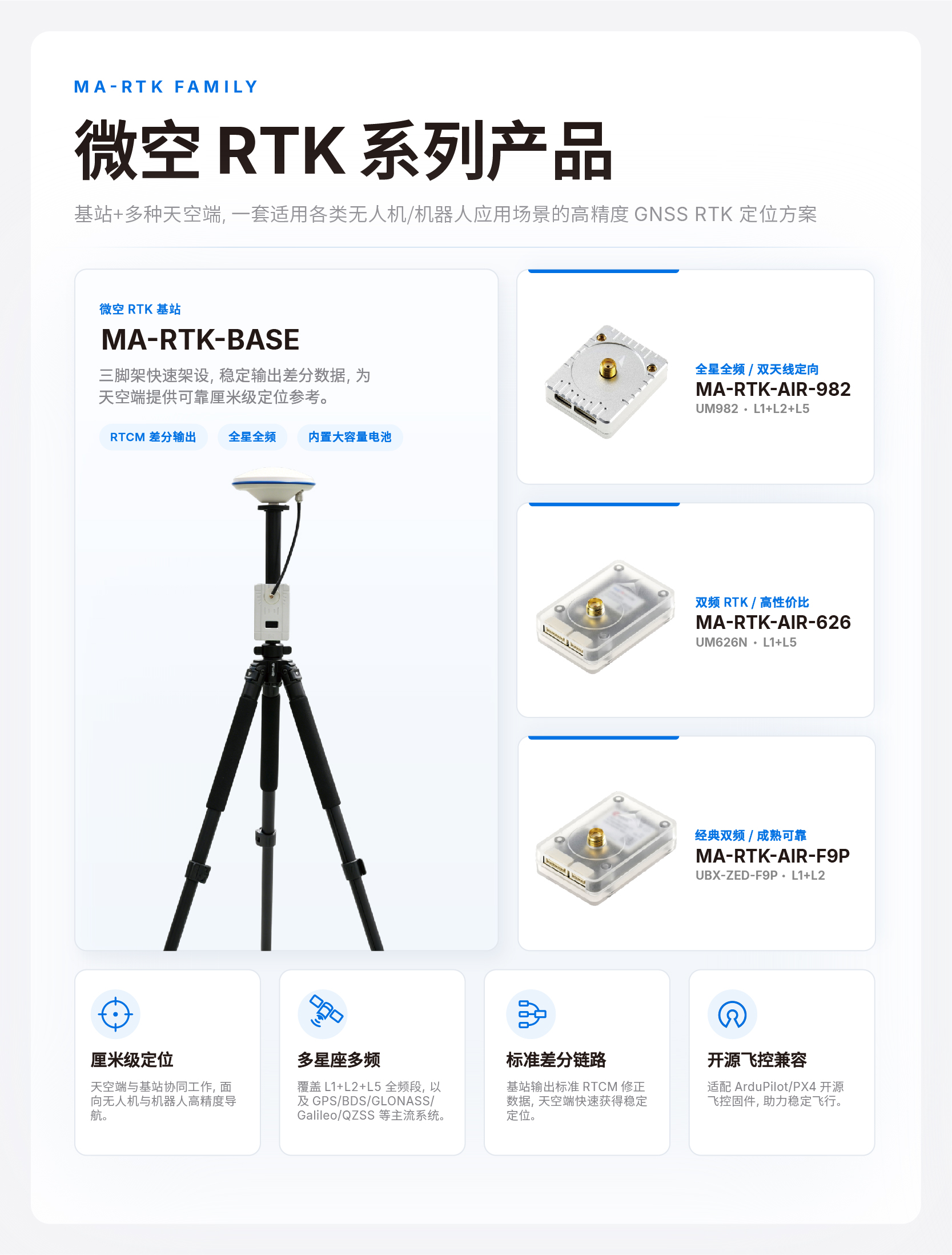
微空 RTK 系列是微空科技设计生产的一套由“基站 + 多种天空端”组合而成的高精度 GNSS 定位方案,专为无人机和各类机器人设计,提供稳定、可靠的厘米级定位服务:
-
厘米级定位:基站与天空端协同工作,定位精度高至1cm。
-
多星多频:覆盖 L1+L2+L5 频段,全面兼容 GPS、北斗、GLONASS、Galileo、QZSS等主流卫星系统。
-
协议标准:基站可稳定输出标准的 RTCM 差分数据,支持绝大部分RTK模块。
-
开源兼容:适配 ArduPilot 和 PX4 等主流开源飞控。
产品型号与特点
地面基站
- MA-RTK-BASE:采用三脚架快速架设,内置锂电池。全星全频段覆盖,为天空端提供稳定的空间参考坐标。输出标准RTCM数据,可兼容微空RTK天空端或其它第三方RTK模块。
天空端
-
MA-RTK-AIR-982:L1+L2+L5 全星全频,支持双天线定向。拥有极高的定位精度,适合磁场环境恶劣的行业应用无人机以及复杂地面环境下运行的无人车。
-
MA-RTK-AIR-F9P:ublox经典的 L1+L2 双频方案,性能稳定成熟可靠,开源飞控固件兼容性最强,是追求稳定作业的经典之选。
-
MA-RTK-AIR-626:L1+L5 国产双频方案。功耗低,极具性价比,适合对成本敏感的批量应用如灯光秀编队。

2. 产品购买
3. 产品特性
3.1 MA-RTK-BASE

-
基站端口波特率说明:USB-Type-C (UART1)和GH1.25-4P (UART2)两个端口的默认波特率均为115200,RTCM输出频率1Hz。可使用合芯星通的UPrecise软件进行配置修改,但非专业工程师不建议自行修改。
-
USB转串口驱动(CH340):CH340驱动下载
-
标准续航时间:带载工作续航约12小时 (含有源RTK蘑菇头天线和平均功率1W的数传)
-
内置电池:2节21700标准锂电池,单节5000mah
-
最大充电功率:10W (5V 2A)

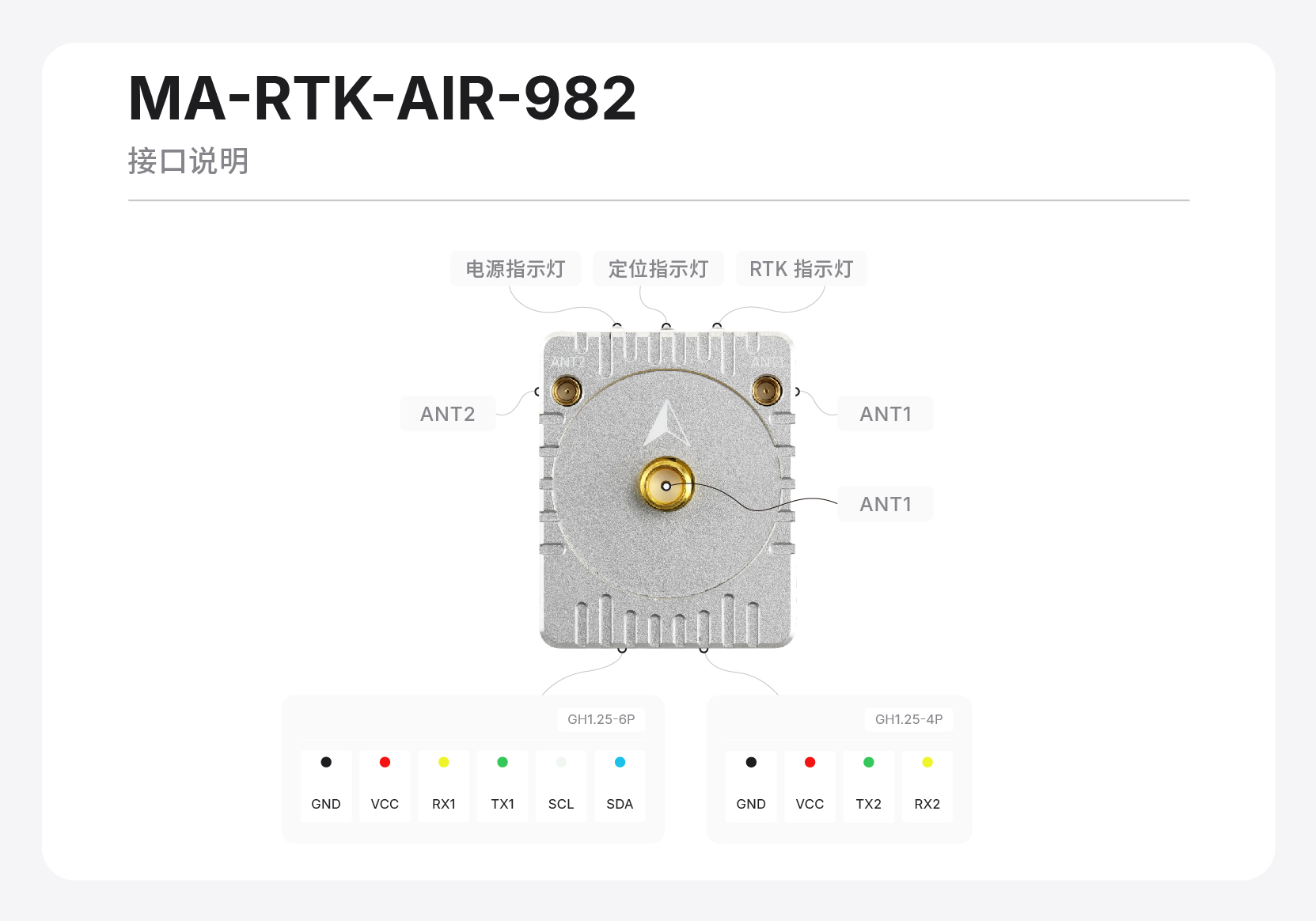
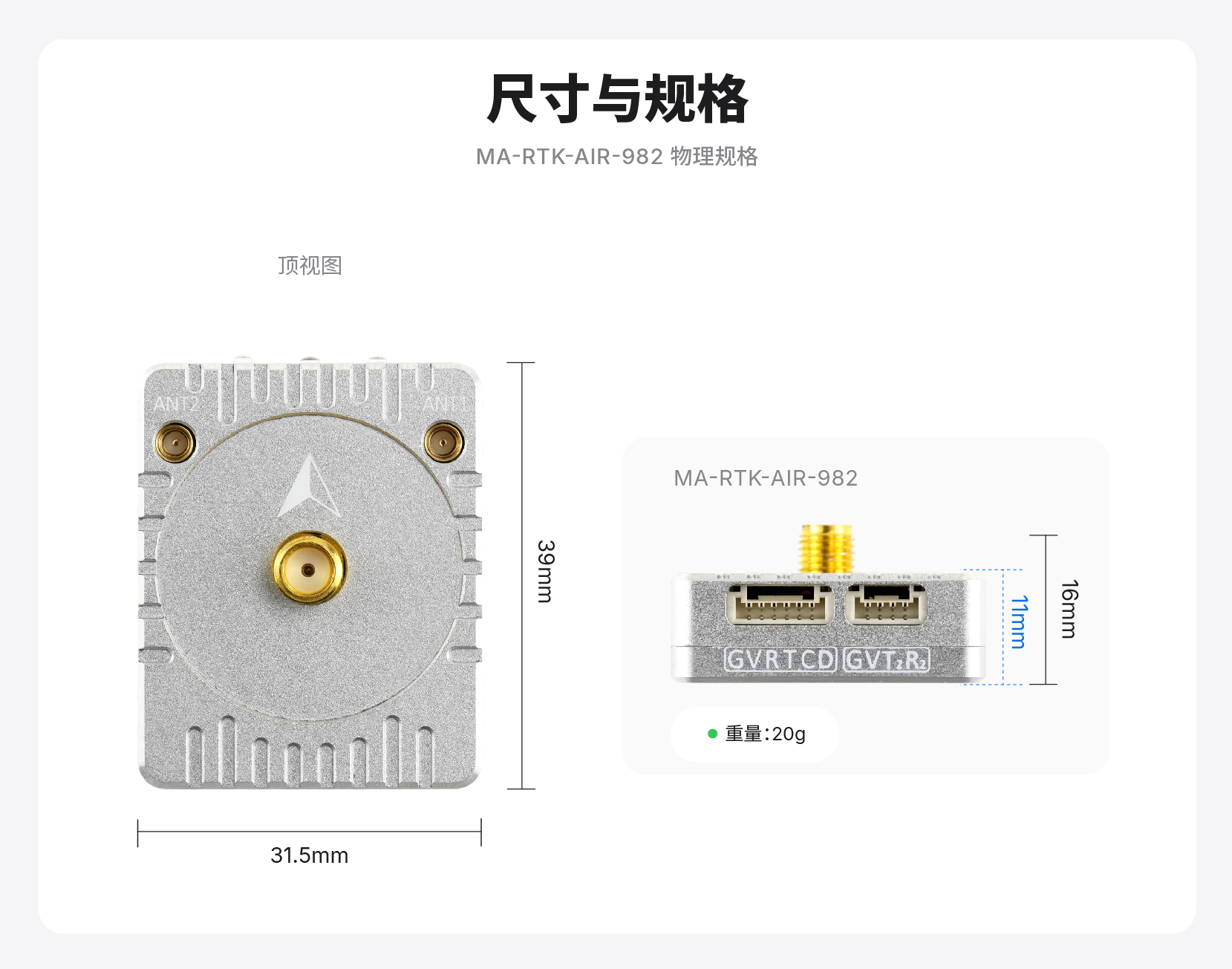
3.2 MA-RTK-AIR-982
- GNSS主控: UM982
- GNSS频段支持: L1 + L2 + L5
- 卫星系统支持: GPS:L1C/A, L2P*/L2C, L5*; BDS: B1l, B2l, B3l; GLONASS: G1, G2; Galileo: E1, E5a*, E5b; QZSS: L1, L2, L5* (标*的表示只有主天线ANT1支持该频段)
- 板载磁力计: IST8310
- 输出协议: NMEA-0183 (出厂设置无数据输出,飞控会自动配置)
- 默认端口波特率: 115200 (通常会被飞控自动配置为230400)
- 飞控固件支持: ArduPilot / PX4
- 最大导航更新率: 20Hz
- 最大导航卫星数: 28(单点)/ 50+(RTK)
- RTK定位精度1:平面0.8cm+1ppm,高程1.5cm+1ppm
- 单点定位精度1:1.5m
- VCC供电电压: 4-5V
- 模组功耗: 700mW
- 串口电平: 3.3V LVTTL
- 产品尺寸:39 x 21.5 x 16mm
- 产品重量:20g (不含天线)
- 天线接口: MMCX x 2, SMA x 1 (注意两个ANT1接口不能同时连接天线,只能使用其中一个)
- 数据接口:GH1.25-6P x 1,GH1.25-4P x 1
1 测试结果受大气条件、基线长度、GNSS天线性能、多路径、可见卫星数以及卫星几何构型等影响,可能会有偏差。
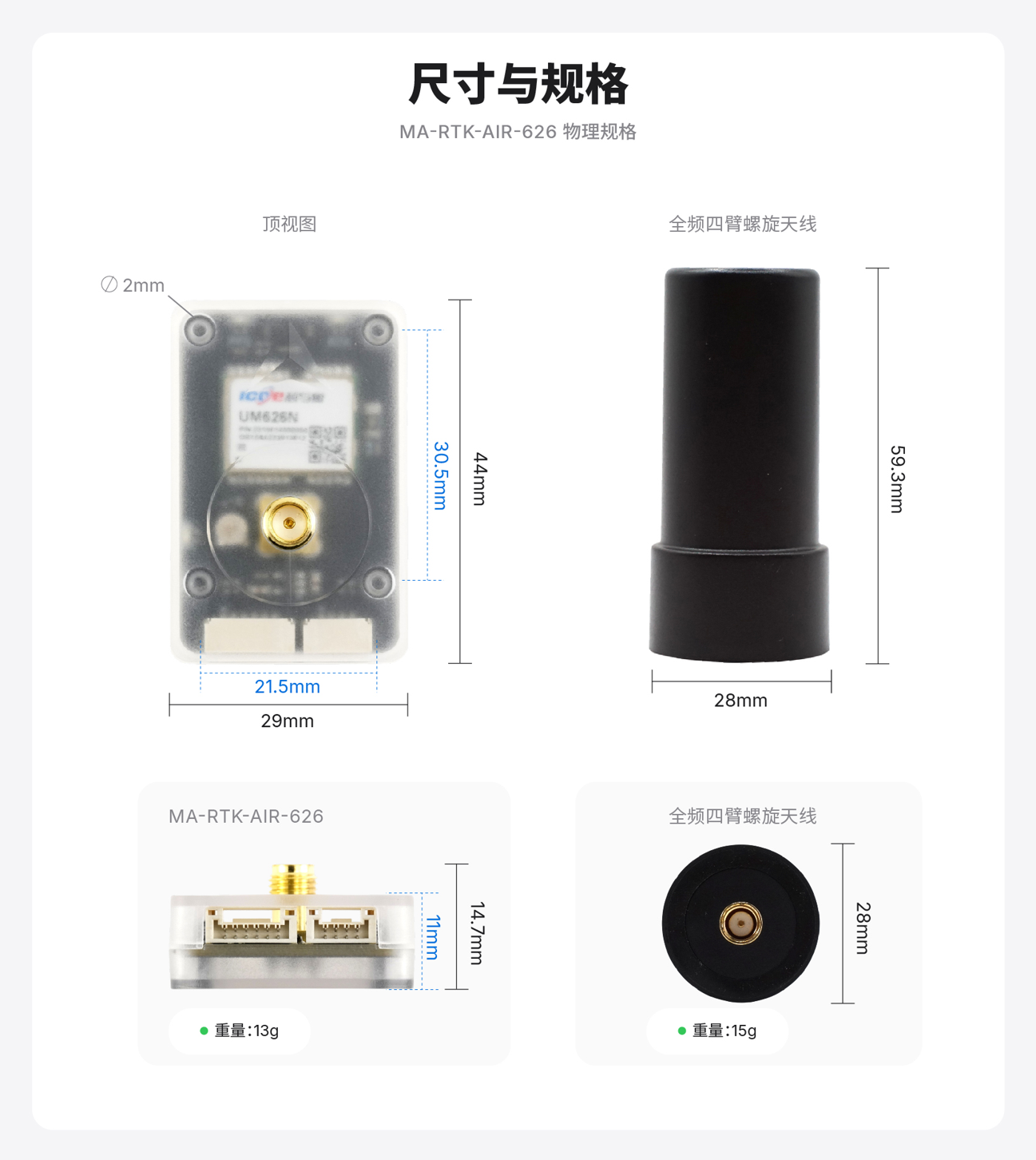
3.3 MA-RTK-AIR-626
- GNSS主控: UM626N
- GNSS频段支持: L1 + L5
- 卫星系统支持: GPS:L1C/A, L5; BDS: B1l, B2a; GLONASS: G1; Galileo: E1, E5a; QZSS: L1, L5
- 板载磁力计: IST8310
- 输出协议: UBX (ublox兼容协议)
- 端口波特率: 115200 (无法修改)
- 飞控固件支持: ArduPilot (PX4暂时不支持)
- 最大导航更新率: 10Hz
- 最大导航卫星数: 36
- RTK定位精度1:1.5cm+1ppm
- 单点定位精度1:1.5m
- VCC供电电压: 4-5V
- 模组功耗: 200mW
- 串口电平: 3.3V LVTTL
- 产品尺寸:44 x 29 x 14.7 mm
- 产品重量:13g (不含天线)
- 天线接口:SMA
- 数据接口:GH1.25-6P x 1,GH1.25-4P x 1
1 测试结果受大气条件、GNSS天线性能、多路径、可见卫星数以及卫星几何构型等影响,可能会有偏差。

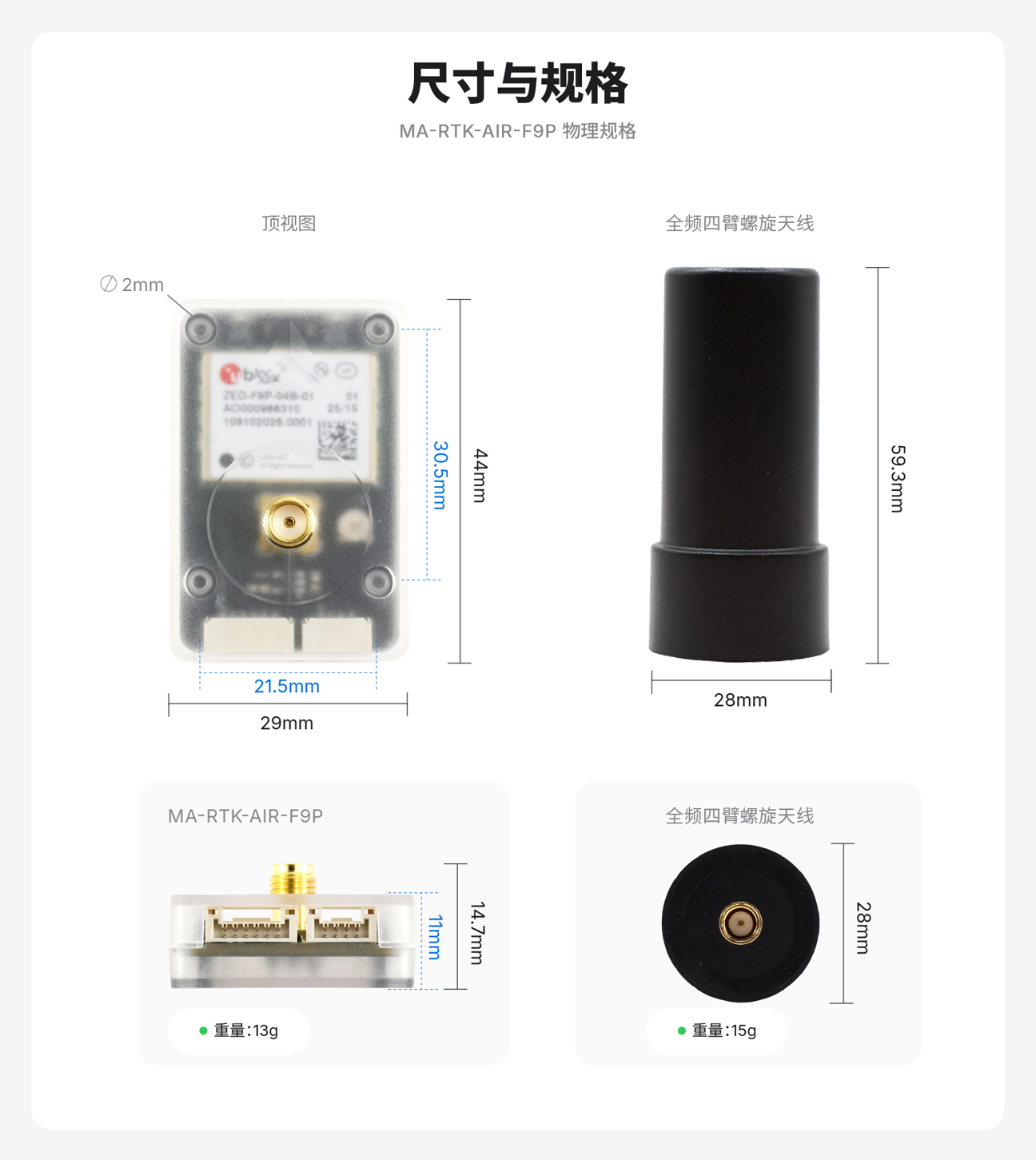
3.4 MA-RTK-AIR-F9P
- GNSS主控: ublox-ZED-F9P
- GNSS频段支持: L1 + L2
- 卫星系统支持: GPS:L1C/A, L2C; BDS: B1l, B2l; GLONASS: G1, G2; Galileo: E1, E5b; QZSS: L1, L2
- 板载磁力计: IST8310
- 输出协议: UBX / NMEA-0183
- 默认端口波特率: 38400 (通常会被飞控自动配置为230400)
- 飞控固件支持: ArduPilot / PX4
- 最大导航更新率: 8Hz(RTK)、10Hz(单点)
- 最大导航卫星数: 32
- RTK定位精度1:1.0cm+1ppm
- 单点定位精度1:1.5m
- VCC供电电压: 4-5V
- 模组功耗: 350mW
- 串口电平: 3.3V LVTTL
- 产品尺寸:44 x 29 x 14.7 mm
- 产品重量:13g (不含天线)
- 天线接口:SMA
- 数据接口:GH1.25-6P x 1,GH1.25-4P x 1
1 测试结果受大气条件、GNSS天线性能、多路径、可见卫星数以及卫星几何构型等影响,可能会有偏差。

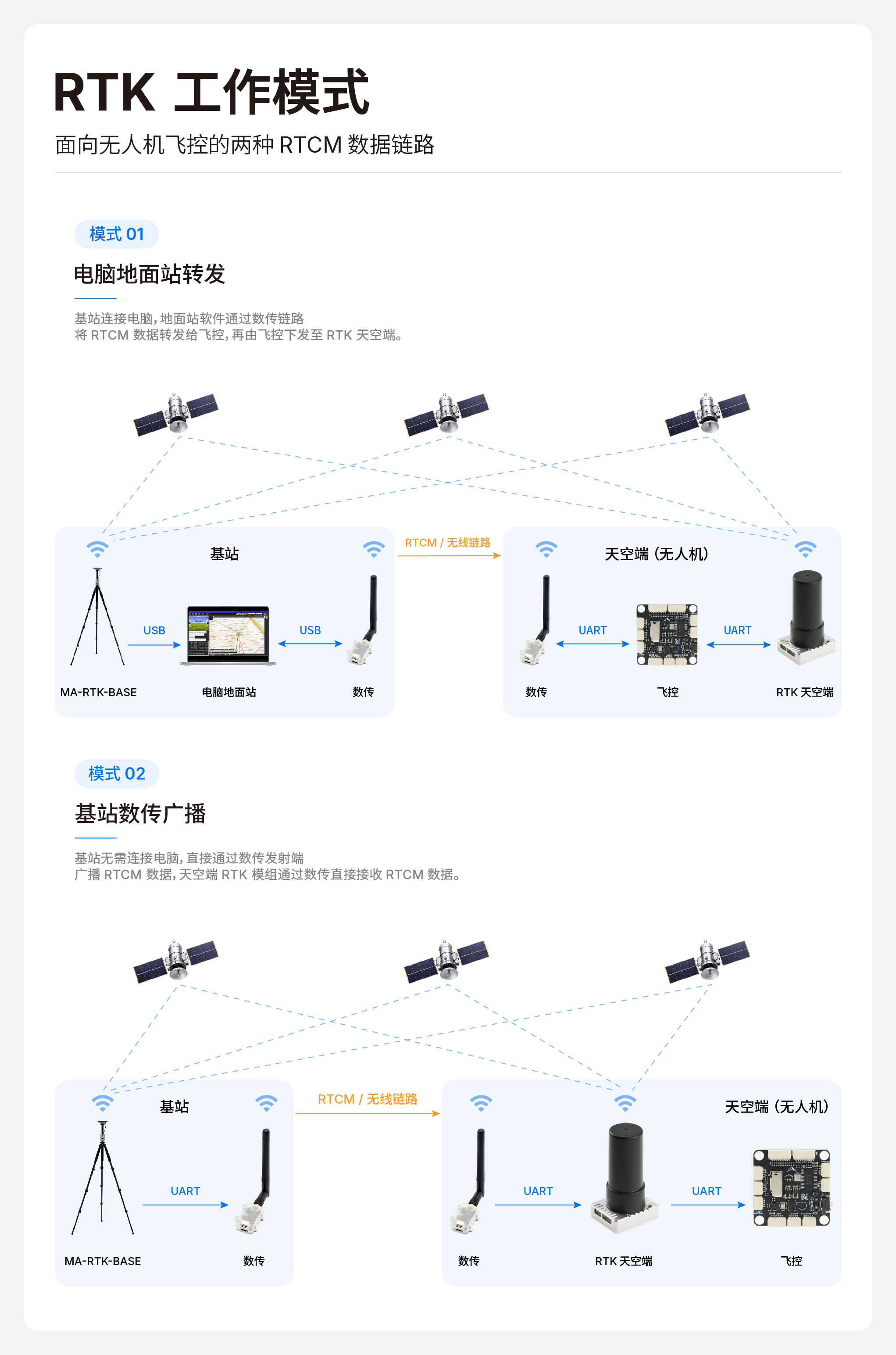
4. RTK工作模式说明
RTK天空端模块需要接收地面基站的RTCM差分修正数据,才能实现厘米级高精度定位,常见有两种RTCM链路模式:
-
地面站转发: 地面基站通过USB连接电脑,地面站软件连接基站,并将基站输出的RTCM数据转发给当前连接的飞控(通常是通过数传无线连接飞控),Mission Planner / QGC 地面站软件或微空的MicoConfigurator均支持RTCM转发功能。
-
基站数传广播: 基站通过数传无线广播RTCM数据。RTK天空端单独连接一个数传,接收基站发出的RTCM数据,实现差分修正。
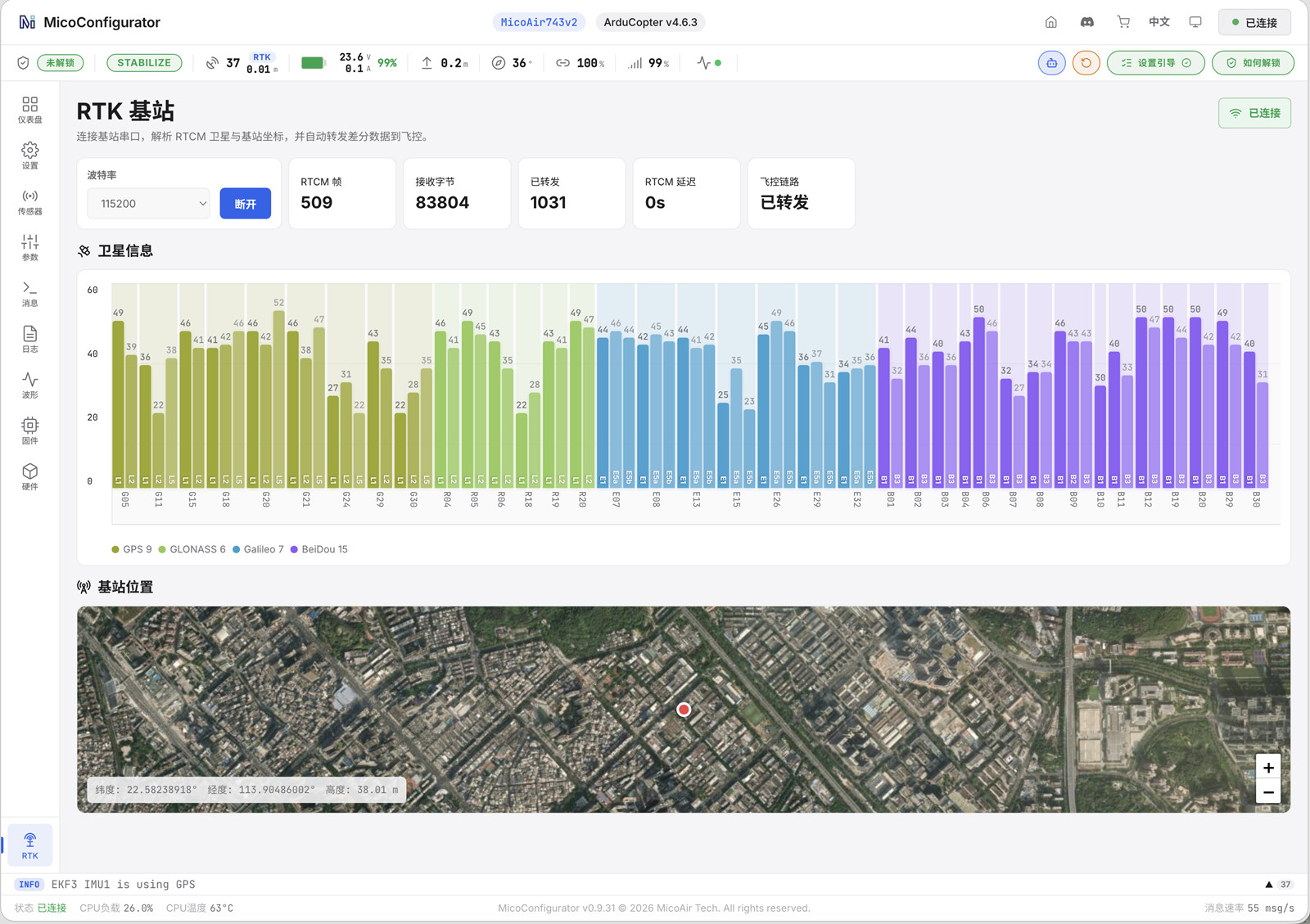
MicoConfigurator连接基站并自动转发RTCM数据给飞控:
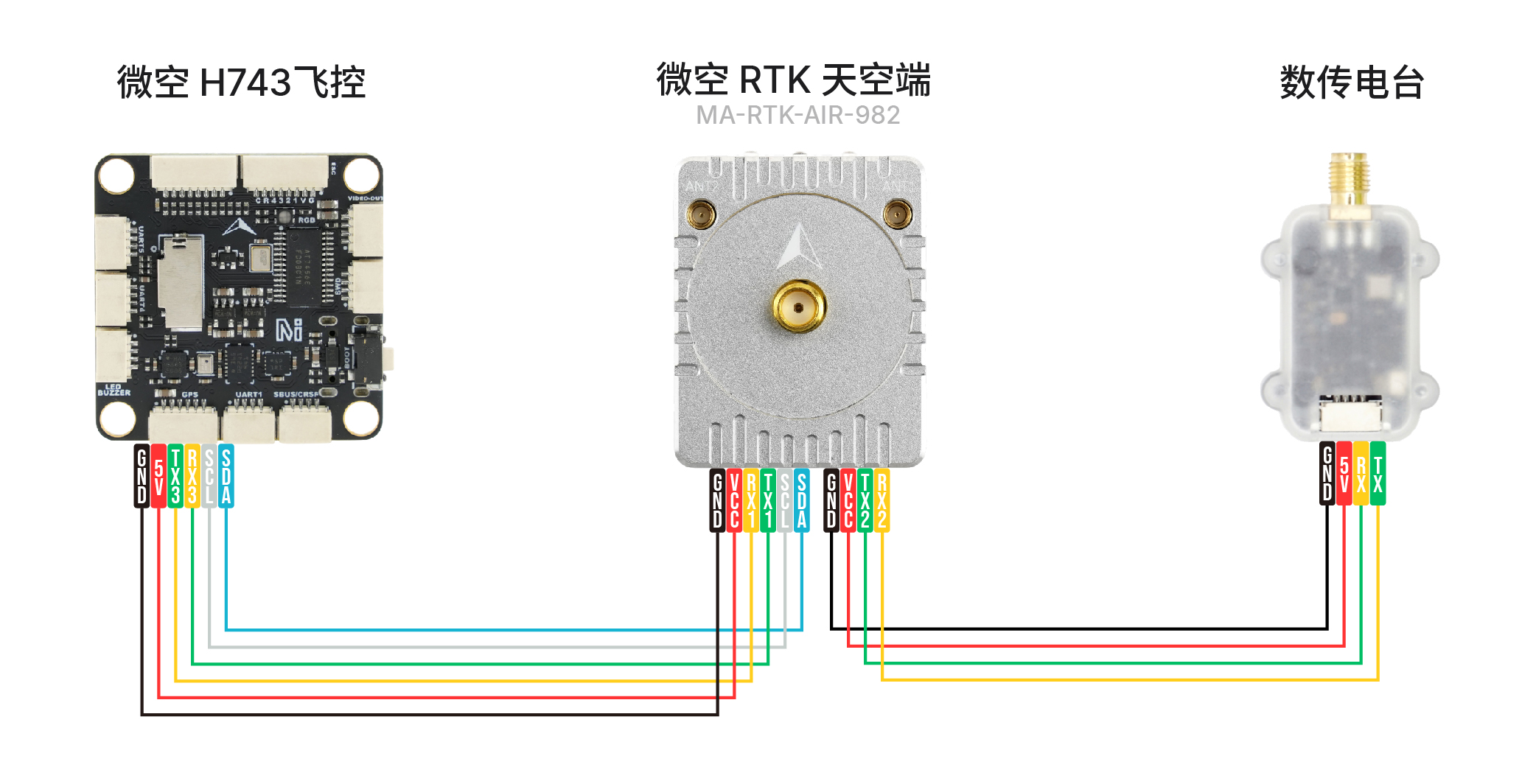
5. 飞控接线示意图
天空端模组的4P端口通常用于连接数传(可选),接收RTCM差分数据。如果使用地面站转发RTCM的方案,则无需连接数传。
MA-RTK-AIR-982 双天线安装使用示例(仅供参考)


6. 尺寸参数

7. 飞控配置教程
7.1 MA-RTK-AIR-F9P教程
和常规Ublox GPS模组一样,Ardupilot和PX4固件均可以自动识别并配置F9P,保持飞控默认设置即可。如果无法识别GPS,通常从硬件连接方面来排查,比如连接端口和线序是否正确。
7.2 MA-RTK-AIR-626教程
MA-RTK-AIR-626当前仅支持Ardupilot(包括Skybrush)固件,PX4固件还无法使用。
在Ardupilot固件中关闭GPS自动配置(GPS_AUTO_CONFIG设置为0),其它保持默认设置,即可自动识别626。如下图所示:

7.3 MA-RTK-AIR-982教程
7.3.1 Ardupilot配置
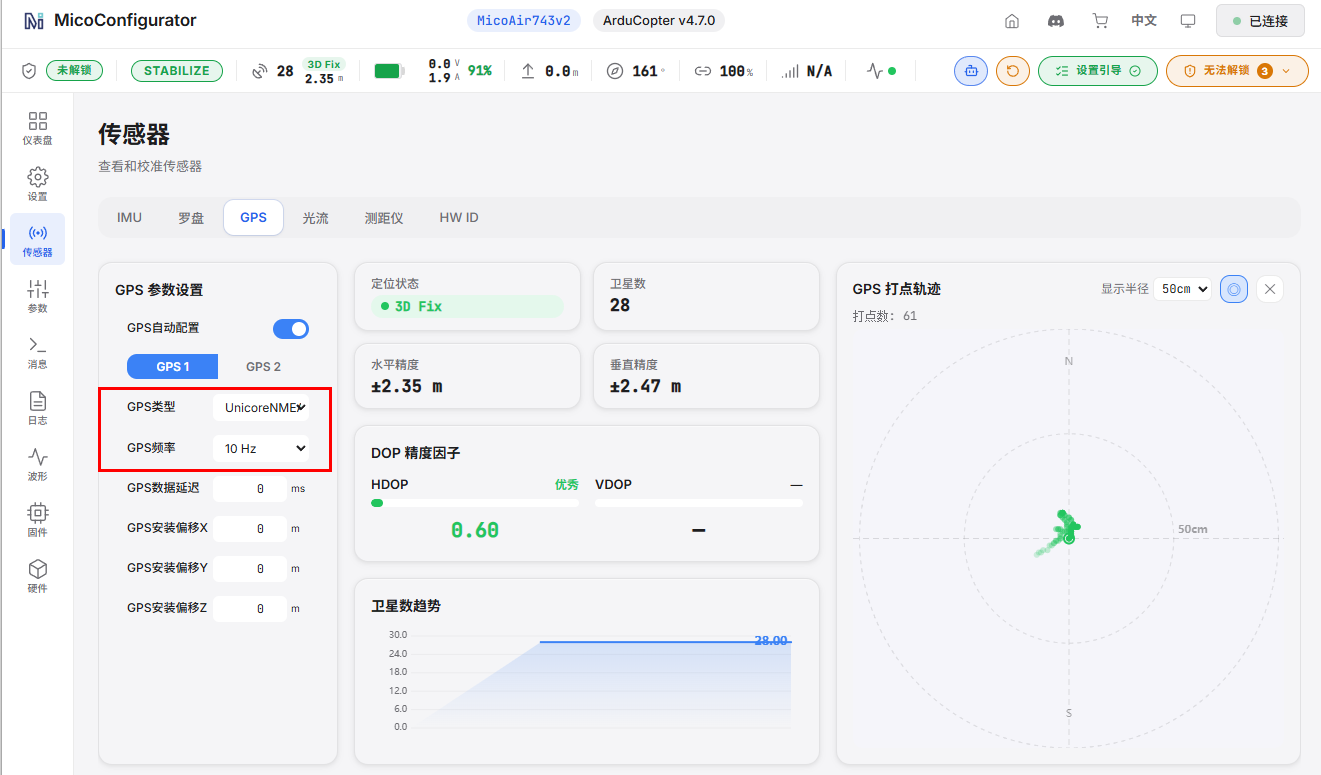
不使用双天线:
GPS1_TYPE = 24(UnicoreNMEA)
GPS1_RATE_MS = 100 (10Hz)

或直接在MicoConfigurator的GPS页面配置:
使用双天线:
注意基线长度(两个天线水平距离)必须要20cm以上才能获得较佳定向精度。
GPS1_TYPE = 25(UnicoreMovingBaselineNMEA)
GPS1_RATE_MS = 100 (10Hz)
GPS_MB1_TYPE=1 (设置 GPS 1 在移动基站(Moving Base)模式下使用的类型。该参数用于双天线 RTK/航向方案。设置完后需要刷新参数或者重新连接飞控才能显示GPS_MB1_OFS子参数)
天线偏移参数,这个是飞控通过双天线RTK计算实时航向的核心参数,必须要认真设置。
- GPS_MB1_OFS_X: 主天线相对于从天线的X轴偏移量(距离以米为单位),如果主天线在从天线的前面为正值,反之则为负值。
- GPS_MB1_OFS_Y: 主天线相对于从天线的Y轴偏移量(距离以米为单位),如果主天线在从天线的右侧为正值,反之则为负值。
- GPS_MB1_OFS_Z: 主天线相对于从天线的Z轴偏移量(距离以米为单位),如果主天线低于从天线则为正值,反之则为负值
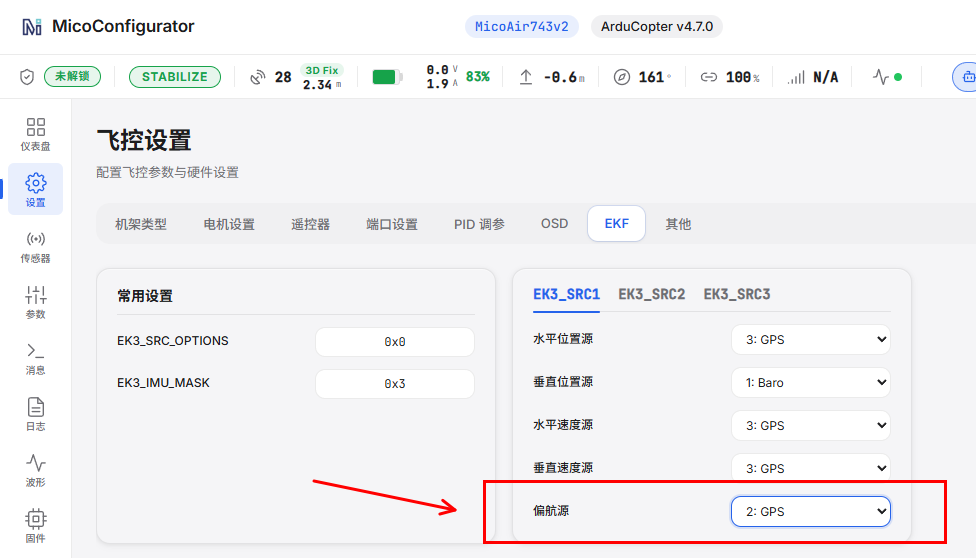
最好还要设置一下主天线定位偏移GPS_POS1_X/Y/Z三个参数,以获得自旋时更好的定位效果。
注意设置完这些参数后,还要设置EK3_SRC1_YAW=GPS,才能让飞控航向估计用上双天线的定向数据:
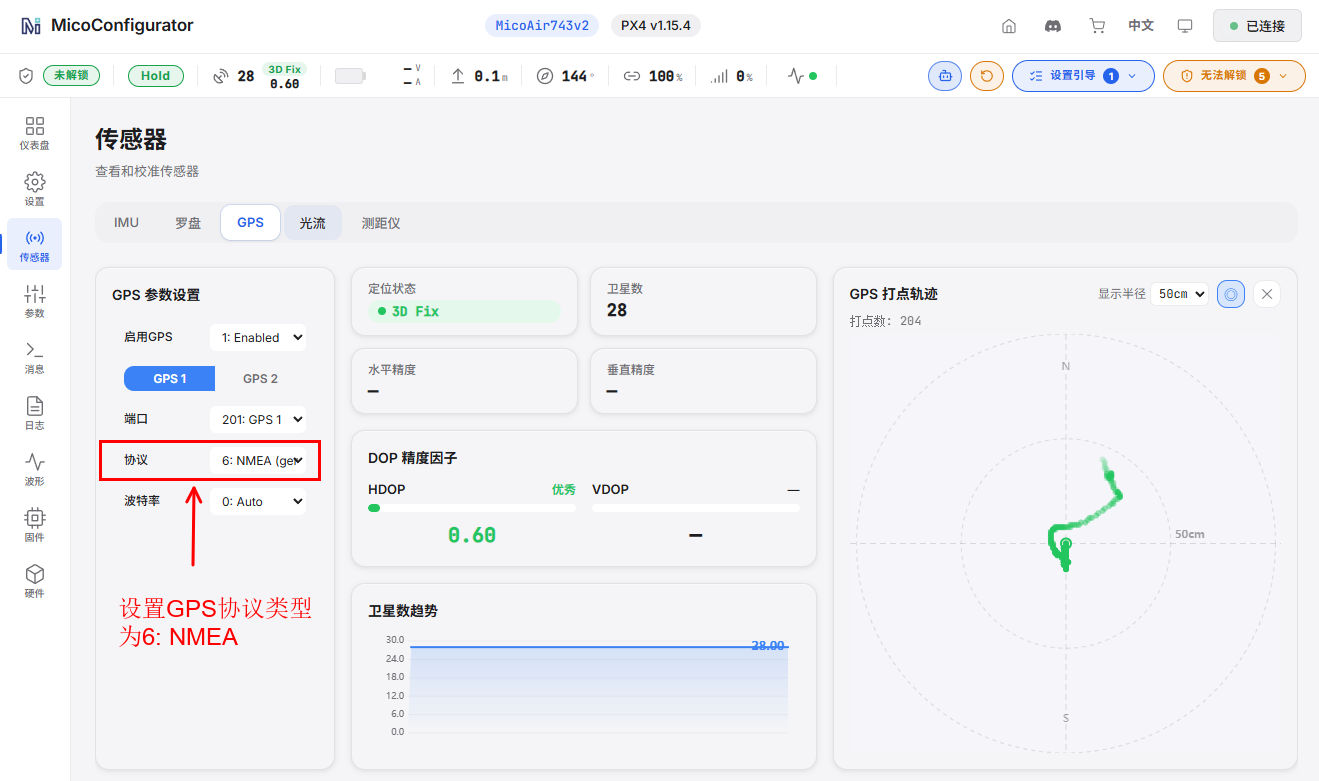
7.3.2 PX4配置
GPS_1_PROTOCOL = 6: NMEA(generic)
重启即可识别GPS。
设置EKF2_GPS_CTRL=15,启用双天线测向

设置GPS_YAW_OFFSET:如果主天线位于从天线前面(两根天线与机体前向平行),则将航向偏移设置为0。角度按顺时针方向增加,如果主天线位于机体右侧,而从天线位于左侧,则将偏移量设置为90度。

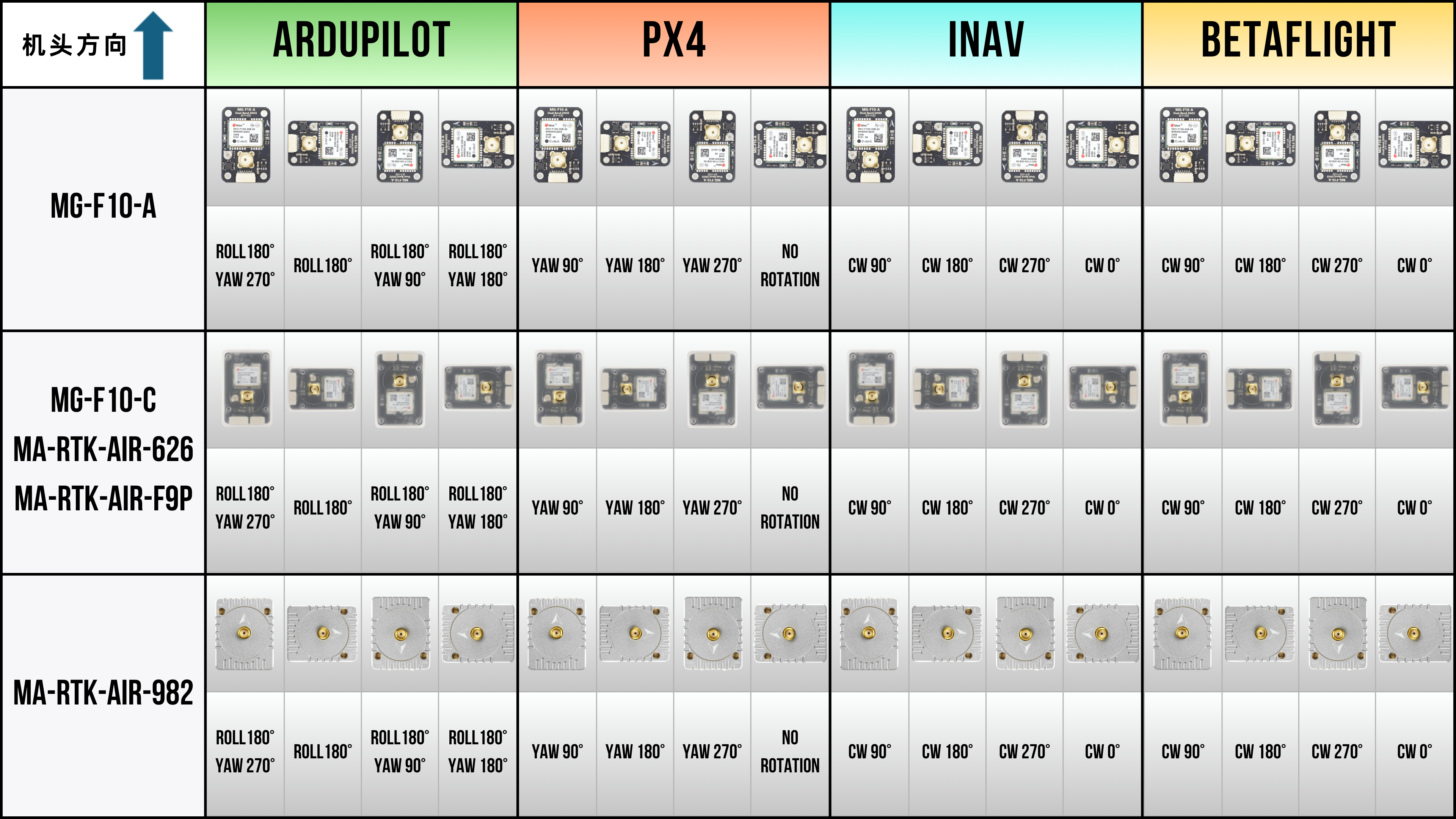
8. 飞控罗盘方向参数说明
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)